Momentum-Conserving Graph Neural Networks for Deformable Objects
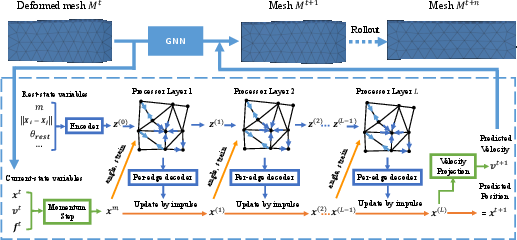
Abstract: Graph neural networks (GNNs) have emerged as a versatile and efficient option for modeling the dynamic behavior of deformable materials. While GNNs generalize readily to arbitrary shapes, mesh topologies, and material parameters, existing architectures struggle to correctly predict the temporal evolution of key physical quantities such as linear and angular momentum. In this work, we propose MomentumGNN -- a novel architecture designed to accurately track momentum by construction. Unlike existing GNNs that output unconstrained nodal accelerations, our model predicts per-edge stretching and bending impulses which guarantee the preservation of linear and angular momentum. We train our network in an unsupervised fashion using a physics-based loss, and we show that our method outperforms baselines in a number of common scenarios where momentum plays a pivotal role.

Paper Prompts
Sign up for free to create and run prompts on this paper using GPT-5.
Top Community Prompts
Explain it Like I'm 14
What is this paper about?
This paper is about teaching a computer to quickly and realistically simulate soft, bendy things—like cloth, jelly, or a soft ball—without breaking the laws of physics. The authors build a new kind of graph neural network (a type of AI that works on dots and connections, like a mesh of a 3D object) that keeps track of momentum correctly, so objects don’t mysteriously drift or spin when they shouldn’t.
What were the main questions?
The researchers wanted to solve two simple but important problems:
- Can a neural network simulate soft objects fast while still obeying physics?
- Specifically, can it conserve momentum—both how much the object is moving (linear momentum) and how much it’s spinning (angular momentum)—unless something external (like gravity or a collision) changes it?
In everyday terms: if you toss a ball or release a cloth, can the AI predict how it moves and turns without adding fake pushes or spins?
How did they approach it?
Think of a soft object (like cloth) as a net of dots (points) connected by lines (edges). A graph neural network (GNN) looks at this net and learns how the shape changes over time.
The authors’ key ideas, explained simply:
- Momentum basics:
- Linear momentum is “how much motion” an object has in a direction ().
- Angular momentum is “how much it’s spinning.”
- Physics says these don’t change unless something external pushes or twists the object.
- Two-step update each moment in time:
- Momentum step: apply only the obvious external effects (like gravity or a hit), which can change total momentum.
- Correction step: apply special “internal” pushes that reshape the object but do not change total momentum.
Predict “impulses” per edge, not accelerations per point:
- Most older methods predicted a separate acceleration for every dot in the mesh, which can accidentally add fake motion or spin.
- This paper predicts tiny “pushes” (impulses) along edges that either:
- stretch/compress edges (like changing the length of the line between two points), or
- bend the mesh (for cloth), using the “dihedral angle” where two triangles meet—like a hinge.
- These impulses are carefully chosen so they can change the shape but never change overall momentum.
- Layer-by-layer updates:
- After each round of predictions, the network updates the shape a bit, then recalculates the directions for the next impulses.
- This step-by-step refinement lets the model handle complicated deformations better while still preserving momentum.
- Velocity “projection”:
- After moving the points, the network makes a tiny adjustment to the velocities so that both the total motion and total spin match perfectly with the new shape. This keeps the math and physics consistent.
- Training with physics, not just examples:
- The model learns without needing perfectly labeled data (no ground-truth accelerations).
- Instead, it uses a physics-based “energy” score to judge if a predicted next step is physically reasonable and improves that over time.
What did they find, and why is it important?
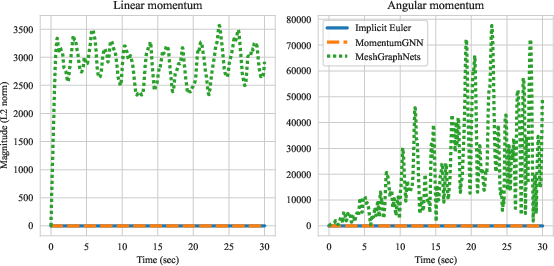
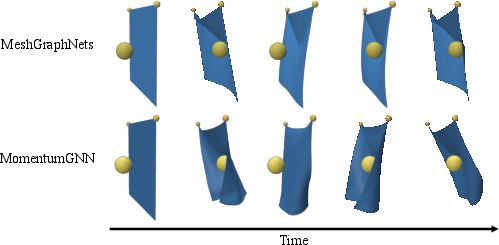
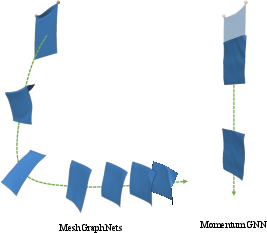
They tested their method (called MomentumGNN) on several scenarios and compared it to a popular older approach (MeshGraphNets):
- Cloth that swings and falls:
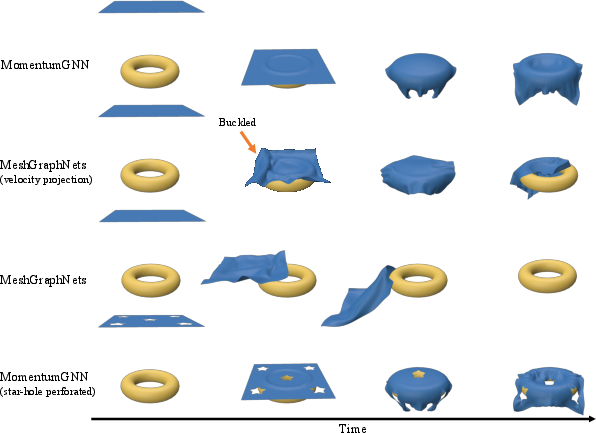
- MomentumGNN makes the cloth fall straight under gravity and wrinkle naturally.
- The older method often makes the cloth drift sideways or spin unrealistically—because it silently “leaks” momentum.
- Cloth dropped on a torus (a donut shape) and even complex “star-hole” shapes:
- MomentumGNN drapes the cloth properly; the older method drifts or collapses into bad shapes.
- Adding a small fix to the older method (velocity adjustment) helps a bit but still misses the realism and stability of MomentumGNN.
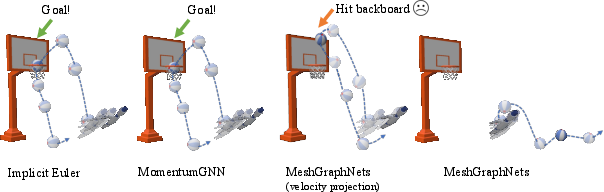
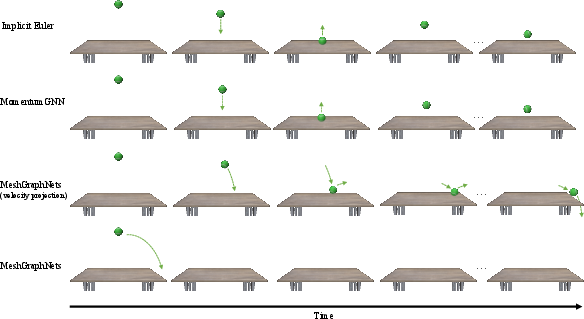
- A basket-shooting scene with a soft ball:
- MomentumGNN predicts a natural arc and scores the shot.
- The older method pushes the ball off course due to fake momentum; even with fixes, it still misses.
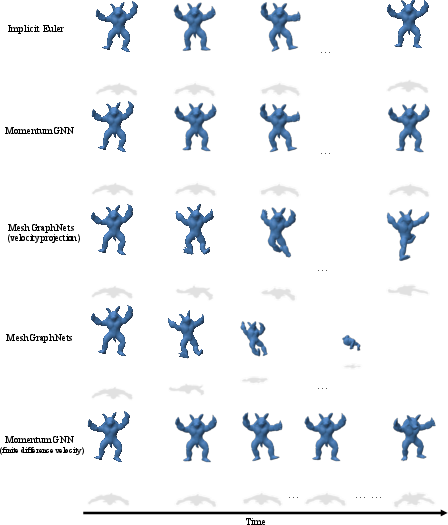
- A complex 3D shape (the Armadillo) released from a bent pose:
- MomentumGNN keeps total motion and spin near zero (as it should, since nothing is pushing it), showing natural swinging of arms and legs.
- The older method drifts and rotates the model wildly over time.
- Speed:
- MomentumGNN runs much faster than a traditional physics solver (around 6× faster in one test), while staying close in realism.
- It’s slightly slower than the older neural method but far more stable and physically correct.
Why it matters: if you want believable motion in games, movies, VR, soft-robotics, or training simulations, you need models that don’t secretly invent motion. MomentumGNN keeps the motion honest.
What’s the bigger picture?
- More reliable AI physics: By building momentum conservation directly into the network, the model avoids common pitfalls like drift and fake spin.
- Generalization: Even when trained on simple shapes (like boxes or flat sheets), it works on new, complex shapes (like the Armadillo model) and challenging scenes (cloth on a donut, a ball in a hoop).
- Practical impact: This can make real-time simulations in games and animation more realistic. It can also help in robotics (like predicting how soft grippers or materials behave) without needing supercomputers.
Future directions the authors suggest:
- Try more advanced graph designs (like hierarchical message passing) for even better performance.
- Learn different material behaviors (like rubbery vs. stiff) directly from data and plug them into the same physics-friendly framework.
Knowledge Gaps
Knowledge gaps, limitations, and open questions
Below is a consolidated list of what the paper leaves unresolved. Each point is framed to enable concrete follow-up work.
- Contact modeling and training: The approach assumes external, non-conservative forces (e.g., contact, friction) are available for the “momentum step,” but it is unclear how these forces are obtained at inference time without a separate collision solver. There is no differentiable contact model in the self-supervised loss, nor an analysis of how to learn contact/friction forces directly from geometry.
- Self-collision and friction: The method demonstrates cloth-object contact but does not address self-collision or frictional contact (static/kinetic) explicitly. It remains open how to incorporate frictional impulses while preserving correct global momentum exchange across bodies.
- Multi-body momentum exchange: When two deformables (or deformable–rigid pairs) interact, internal forces between them should conserve momentum at the system level. The current decomposition treats contact as “external” per body; mechanisms to ensure global momentum conservation across interacting bodies are not specified or evaluated.
- Material model breadth: The network is trained and tested on elastic solids/shells with limited constitutive families (Neo-Hookean, Saint Venant–Kirchhoff). Generalization to near-incompressible, anisotropic, heterogeneous, viscoelastic, or plastic materials is untested, and mechanisms for conditioning on material parameters are not evaluated.
- Learned constitutive behavior: While the authors mention integrating learned constitutive laws as future work, the paper does not outline how to couple data-driven materials with the momentum-conserving impulse basis or how to prevent learned models from violating other physical constraints (e.g., non-interpenetration, positive definiteness).
- Impulse basis richness for 3D solids: The chosen basis (edge-length gradients) plus dihedral angles (for shells) may be insufficient to efficiently capture volumetric shear modes or near-incompressibility in tet meshes. The practicality of adding volume- and face-based invariants (e.g., element volumes, face areas) is not explored.
- Mesh dependence and resolution effects: Because impulses are anchored to mesh edges/dihedrals, the representation may be sensitive to mesh quality and anisotropy. There is no analysis of how predictions vary with mesh refinement, element distortion, or different tessellations of the same shape.
- Energy behavior and dissipation: The architecture focuses on momentum conservation but does not control or analyze energy error. It remains unclear how to introduce, target, or bound dissipation (e.g., Rayleigh damping, air drag) while maintaining stable long-horizon behavior.
- Stability and time-step sensitivity: There is no study of numerical stability as a function of time step, stiffness, or conditioning (especially for stiff or nearly inextensible materials). Guidelines for choosing Δt or making the method robust under variable time stepping are missing.
- Long-horizon error accumulation: Beyond qualitative rollouts, there is no quantitative assessment of long-horizon drift (e.g., trajectory error, deformation error, energy drift) or comparisons to symplectic/structure-preserving integrators.
- Equivariance and data efficiency: Although the impulse directions derive from invariant quantities, the GNN backbone itself is not SE(3)-equivariant. The paper does not test whether using equivariant message-passing would reduce the need for data augmentation and improve generalization.
- Hierarchical message passing and scalability: The authors note not exploring hierarchical/U-Net-style GNNs. There is no complexity analysis of per-edge decoders and per-layer position updates (O(|E|) operations), nor strategies for scaling to very large meshes (e.g., coarsening, multigrid, or sparse neighborhoods).
- Velocity projection scope: The momentum-preserving velocity projection solves a 6-constraint QP for a single connected body. Extensions to multiple connected components, pinned/constrained nodes, or additional integral constraints are not described, nor are failure cases (e.g., near-singular configurations).
- Boundary conditions and constraints: Treatment of Dirichlet (pins) and Neumann (tractions) boundary conditions within the momentum-conserving update is underspecified. How to incorporate hard constraints and still retain momentum consistency is not detailed.
- Training on contacts and complex scenes: The self-supervised loss is based on a modified implicit Euler potential for unconstrained internal energies. There is no demonstration of training with contact/friction losses, nor an approach to mitigating non-smoothness from collisions in the training objective.
- External-force estimation: For scenes with complex interactions (e.g., contact, controllers), the pipeline to estimate f_ext at inference time is unspecified. A learned external-force estimator (or model-based module) is not provided, leaving a practical gap for deployment without a traditional physics solver.
- Topology changes and remeshing: The method is not evaluated for tearing, cutting, fracture, or remeshing—scenarios where the graph and momentum-exchange pathways change over time.
- Robustness to noise and partial observability: Training uses synthetic noise, but robustness to real sensor noise, missing data, or partial observations (common in learned simulators and inverse problems) is not evaluated.
- Quantitative benchmarks and ablations: Aside from a momentum plot and FPS, the paper lacks standardized quantitative metrics (e.g., trajectory/deformation errors vs. ground truth), comprehensive comparisons to physics-aware baselines (e.g., Hamiltonian/Lagrangian GNNs, symplectic schemes), and ablations (e.g., number of layers, aggregator choices, impulse bases).
- Completeness of impulse basis: The claim that the per-edge basis is complete (can generate any momentum-preserving impulse) is deferred to the supplement. A constructive evaluation across diverse meshes and boundary conditions (and for tets vs. triangles) is not presented in the main text.
- Real-world validation: All results are simulation-based; there is no validation against physical experiments (e.g., measured trajectories or deformations of real cloth/soft solids), leaving the real-to-sim gap unquantified.
- Coupling with other physics: Fluid–structure interaction, thermoelastic effects, or electro-mechanical coupling are not considered. Extending momentum-consistent impulses to multi-physics settings remains open.
- Design choices in GNN blocks: The paper fixes certain architectural choices (e.g., max-pooling for edge decoding, GELUs, layer norms) without exploring alternatives that might better capture long-range couplings or reduce over-smoothing, leaving optimal design unexplored.
- Failure modes and guarantees: There is no characterization of failure cases (e.g., highly twisted shells, near-degenerate elements, extreme impacts) or formal guarantees beyond momentum conservation (e.g., non-interpenetration, conditioning bounds).
Practical Applications
Immediate Applications
Below are concrete ways the paper’s findings and methods can be put to use right now, given the demonstrated momentum-conserving surrogate simulation, per-edge impulse decoders (stretching/bending), layerwise position updates, and velocity projection.
Industry
- Real-time previsualization of cloth and soft bodies in content creation tools
- Sector: media and entertainment (VFX, games), software
- What: Use MomentumGNN as a viewport/in-editor solver for interactive drape, swing, and contact (e.g., cloth-on-props, soft ball trajectories) with reduced drift and spin vs. standard GNN surrogates.
- Tools/products/workflows: Blender/Maya/Houdini plugin; Unity/Unreal component; authoring workflow that switches between MomentumGNN previews and high-fidelity CPU solvers for final frames.
- Assumptions/dependencies: GPU availability; moderate mesh resolutions; collisions modeled externally or via existing engine; materials calibrated to target assets; not yet validated for extreme self-collision, tearing, or highly anisotropic materials.
- Faster CAD/CAE pre-checks for textile drape and packaging design
- Sector: apparel design, manufacturing, packaging
- What: Rapid “first-pass” feasibility and aesthetics checks (drape, fold patterns) using momentum-consistent surrogates to reduce art/engineering iteration time.
- Tools/products/workflows: CLO3D/Optitex/COMSOL/Ansys integration as a preview solver; batch pre-screening jobs before running full FEM.
- Assumptions/dependencies: Requires material parameter calibration; acceptable for pre-screening but not a replacement for certified solvers.
- Robotics simulation for throwing, placing, and soft-object handling
- Sector: robotics
- What: Use the surrogate to reduce spurious momentum in training/evaluation of throw trajectories (e.g., ball-in-basket, bag placement) and in scene setup for planning.
- Tools/products/workflows: Isaac Sim/MuJoCo/PyBullet wrappers; model-based policy prototyping where surrogate stability matters for long rollouts.
- Assumptions/dependencies: Contact/friction modeling quality is critical; validated mostly for simple soft objects; closed-loop control still requires careful sim-to-real calibration.
- Momentum QA for existing physics surrogates
- Sector: software, quality assurance
- What: Integrate the paper’s velocity projection and momentum metrics to detect and mitigate momentum drift in any graph-based simulator pipeline.
- Tools/products/workflows: “Momentum dashboard” to track linear/angular momentum over sequences; drop-in velocity-projection module.
- Assumptions/dependencies: Cannot fix architecture-level issues alone; projection mitigates but does not remove non-physical accelerations if the core model is unconstrained.
Academia
- Stable rollouts for data-free/self-supervised training
- Sector: research/education
- What: Leverage the physics-based loss and momentum-conserving architecture to train on canonical shapes (sheets, cuboids) and study generalization to complex meshes.
- Tools/products/workflows: PyTorch training pipelines; reproducible curricular modules for teaching conservation laws in learned simulators.
- Assumptions/dependencies: Access to energy models and external force representations; careful noise injection and calibration.
- Benchmarking ML simulators with conservation metrics
- Sector: research infrastructure
- What: Add linear/angular momentum error curves to standard benchmarks; compare surrogate designs on drift, spin, and ballistic motion fidelity.
- Tools/products/workflows: Open benchmark suites with provided test scenes (cloth fall, drape on torus, ballistic soft ball).
- Assumptions/dependencies: Consistent contact models and materials across baselines.
Policy
- Procurement/test requirements for digital content and digital twins
- Sector: public sector, regulated industries
- What: Include conservation-law checks (momentum error thresholds) in evaluation criteria for ML simulators used in public-facing visualizations or pre-design digital twins.
- Tools/products/workflows: Validation harness with standard scenes and metrics.
- Assumptions/dependencies: Non-binding guidance for non-safety-critical contexts.
Daily Life
- Interactive educational demos for physics learning
- Sector: education/consumer apps
- What: Browser or app-based visualizations demonstrating cloth/soft-body dynamics that “feel right” due to built-in momentum conservation.
- Tools/products/workflows: WebGPU/WebAssembly demos, classroom activities.
- Assumptions/dependencies: Simplified scenes; server-side GPU or efficient client hardware.
Long-Term Applications
These opportunities need further R&D for robustness, scaling, material diversity, complex contact, or certification.
Industry
- Production-grade, real-time cloth and soft-body simulation on edge devices
- Sector: AR/VR, mobile, games
- What: Momentum-consistent surrogate as the default runtime solver on headsets/phones for avatars, garments, hair-like shells, soft props.
- Tools/products/workflows: Engine-level integration with robust collision stacks; streaming material profiles.
- Assumptions/dependencies: Efficient kernels for on-device inference; strong collision/self-collision handling; broad material coverage; battery/thermal constraints.
- Digital twins of deformable-material processes
- Sector: manufacturing, logistics, retail
- What: Fabric handling (cutting, folding, stacking), automated packaging and wrapping, garment assembly—using fast surrogates for planning and monitoring.
- Tools/products/workflows: Pipeline to calibrate materials from line data; hybrid surrogate–FEM loops; real-time anomaly detection on the twin.
- Assumptions/dependencies: Domain adaptation, robust contact with tools/conveyors; uncertainty quantification; integration with PLC/SCADA systems.
- Autonomous manipulation of cloth and deformables
- Sector: robotics
- What: Model-predictive control and safe planning that rely on momentum-consistent learned dynamics to avoid non-physical drift during long horizons.
- Tools/products/workflows: Differentiable or policy-gradient-friendly versions; online adaptation; safety monitors using conservation-law residuals.
- Assumptions/dependencies: High-fidelity contact/friction; partial observability; certification of ML-in-the-loop planning.
- Safety-critical soft-structure simulation
- Sector: automotive (airbags, seat foams), aerospace (parachutes, deployables)
- What: Accelerated design loops with surrogates that preserve global quantities; use as co-simulators to guide expensive high-fidelity runs.
- Tools/products/workflows: Verification and validation toolchains; twin-surrogate co-simulation to prune design spaces.
- Assumptions/dependencies: Rigorous verification, uncertainty bounds, and traceability; complex material models (rate dependence, anisotropy) not yet supported.
- Medical/biomechanics training and planning
- Sector: healthcare
- What: Surgical rehearsal with soft tissue simulators that maintain correct global dynamics during fast interactions.
- Tools/products/workflows: Haptic systems backed by learned surrogates; patient-specific model calibration.
- Assumptions/dependencies: Viscoelastic, cutting, fluid–structure, and tissue heterogeneity models; regulatory clearance.
Academia
- Unified momentum-conserving learned simulators for multi-physics
- Sector: simulation research
- What: Extend per-edge impulse bases to richer invariants and couple shells, solids, and fluids while preserving conservation laws end-to-end.
- Tools/products/workflows: Hybrid Hamiltonian/Lagrangian GNNs with dissipative/conservative decompositions; adaptive hierarchies.
- Assumptions/dependencies: Mathematical guarantees under contact; scalable message passing (hierarchical/graph U-Nets).
- Inverse design and material identification under conservation constraints
- Sector: design optimization, materials science
- What: Fit constitutive laws and discover materials via differentiable, momentum-safe surrogates to accelerate outer-loop optimization.
- Tools/products/workflows: Gradient-based or Bayesian pipelines; lab-in-the-loop calibration with conservation-aware losses.
- Assumptions/dependencies: Differentiable contact; robust gradients; rich datasets of experimental measurements.
- Standardization of conservation-aware evaluation
- Sector: research infrastructure, standards
- What: Community benchmarks that require tracking and reporting conservation law violations for ML simulators.
- Tools/products/workflows: Open datasets; leaderboards with momentum/energy drift metrics.
- Assumptions/dependencies: Consensus on metrics and test scenes; shared contact/material libraries.
Policy
- Certification frameworks for ML-based simulators in engineering workflows
- Sector: regulators, certification bodies
- What: Require demonstrable adherence to conservation laws, uncertainty quantification, and failure modes for ML surrogates in pre-design or decision-support roles.
- Tools/products/workflows: Conformance tests; documentation standards; auditing procedures.
- Assumptions/dependencies: Cross-stakeholder alignment; domain-specific risk thresholds; evolving regulatory guidance.
Daily Life
- High-fidelity AR try-on and digital fashion at scale
- Sector: retail/e-commerce
- What: Personalized, real-time garment drape with stable, realistic motion while the user moves.
- Tools/products/workflows: On-device or edge inference; automatic material/fit calibration from phone sensors.
- Assumptions/dependencies: Strong generalization to body shapes, motions, and fabrics; privacy-preserving calibration; efficient collision with body meshes.
Notes on overarching assumptions and dependencies across applications:
- Training regime requires access to internal energy models and external force representations for self-supervision; otherwise supervised data must be curated.
- Material coverage in the paper is limited (Saint Venant–Kirchhoff for shells, Neo-Hookean for solids); broader and anisotropic/viscoelastic models will need extensions.
- Collision and self-collision handling are external to the core architecture; complex contact scenarios and topology changes (tearing, cutting) are not demonstrated.
- Performance reported on a high-end GPU; mobile/edge deployment will need optimization and possibly model compression or specialized kernels.
- Stability hinges on per-layer position updates and accurate geometry features; mesh quality and timestep selection remain important.
Glossary
- Adam optimizer: A stochastic gradient-based optimization algorithm commonly used to train neural networks. "We use the Adam optimizer with a learning rate "
- angular momentum: A conserved physical quantity associated with rotational motion of a system. "linear and angular momentum"
- bending impulses: Per-edge impulse magnitudes that drive curvature (out-of-plane) changes while conserving momentum. "per-edge stretching and bending impulses"
- computational fluid dynamics (CFD): The field focused on numerically solving fluid flow problems. "computational fluid dynamics (CFD)"
- constant strain triangles: A finite element type assuming uniform strain within each triangular element. "We use discrete shells and constant strain triangles with a Saint Venant-Kirchhoff material for cloth"
- convex quadratic program: An optimization problem with a convex quadratic objective and linear constraints. "We cast this problem as a convex quadratic program,"
- dihedral angle: The angle between the normals of two triangles sharing an edge, measuring bending in meshes. "use the dihedral angle formed by two edge-adjacent triangles."
- discrete differential geometry: A framework that discretizes differential geometric concepts for meshes to compute intrinsic shape quantities. "finite element discretizations and discrete differential geometry operators offer a large range of deformation measures"
- discrete shells: A discrete model for thin shell materials that captures bending and stretching behavior on triangle meshes. "We use discrete shells and constant strain triangles with a Saint Venant-Kirchhoff material for cloth"
- encode-process-decode architecture: A neural network paradigm that encodes inputs, processes them via message passing, and decodes outputs. "encode-process-decode architecture that takes a simulation mesh as input and predicts nodal accelerations."
- finite differences: A numerical method that approximates derivatives using differences between function values at discrete points. "from which velocities are updated using finite differences,"
- finite elements: A numerical technique that discretizes a domain into elements to solve PDEs or simulate physical systems. "Although established simulation methods based on, e.g., finite elements are robust, versatile, and accurate,"
- Gaussian Error Linear Units (GELU): An activation function for neural networks that blends properties of ReLU and Gaussian noise. "Gaussian Error Linear Units (GELU) as activation functions."
- Gmsh: An open-source mesh generation tool used to create geometric meshes for simulations. "using the Gmsh package."
- graph neural networks (GNNs): Neural architectures that operate on graph-structured data via message passing between nodes and edges. "Graph neural networks (GNNs) have emerged as a versatile and efficient option"
- Hamiltonian: An energy-like quantity representing total energy (kinetic plus potential) used to describe system dynamics. "approximating energy-like quantities such as Hamiltonian"
- implicit Euler: A stable time-integration scheme using values at the next time step, often formulated variationally. "Using the optimization-based formulation of implicit Euler"
- internal elastic energy: The potential energy stored in a deformable object due to deformation. " is the internal elastic energy,"
- Lagrangian: In optimization, a function that combines the objective and constraints via Lagrange multipliers to enforce optimality. "The Lagrangian of this optimization problem is"
- layer normalization: A normalization technique that stabilizes training by normalizing features within each layer. "layer normalization"
- mass matrix: A matrix that encodes the distribution of mass across nodes in a discretized system. " is the mass matrix,"
- mass-spring chain: A simplified mechanical model with masses connected by springs to study dynamic behavior. "the example of a 2D mass-spring chain"
- MeshGraphNets: A GNN-based architecture for mesh-based physical simulation using an encode-process-decode design. "A landmark work in this area is MeshGraphNets"
- message passing: The process in GNNs where nodes exchange and aggregate information via edges to update representations. "The message passing begins by computing messages"
- momentum-conserving impulses: Impulses constructed to change intrinsic deformation measures without altering linear or angular momentum. "predict momentum-conserving stretching and bending impulses"
- momentum step: An integration sub-step that advances the state using inertia and external non-conservative forces before elastic corrections. "we define the momentum step as"
- Neo-Hookean material: A nonlinear elastic material model commonly used for rubber-like solids. "a Neo-Hookean material for volumetric solids."
- non-conservative forces: External forces that do not derive from a potential and can change the system’s total energy or momentum. "non-conservative external forces"
- partial differential equations (PDEs): Equations involving multivariable functions and their partial derivatives, governing many physical systems. "solving partial differential equations (PDEs)"
- physics-informed neural networks (PINN): Neural networks trained with losses that enforce physical laws expressed by PDEs. "physics-informed neural networks (PINN)"
- Pose Space Deformation (PSD): A deformation technique that corrects mesh shapes based on pose-dependent blendshapes. "Pose Space Deformation (PSD)"
- Saint Venant-Kirchhoff material: A classical nonlinear elastic model based on a quadratic strain energy with respect to the Green-Lagrange strain. "a Saint Venant-Kirchhoff material"
- SMPL parameterization: A parametric human body model used to represent body shape and pose for animation and simulation. "SMPL parameterization"
- tetrahedral meshes: Volumetric meshes composed of tetrahedra used to discretize 3D solids for simulation. "volumetric objects represented using tetrahedral meshes"
- thin shells: Structures with one dimension much smaller than the others, where bending and in-plane stretching are dominant behaviors. "thin shell materials"
- variational formulation: Expressing a numerical method as the minimization of an energy functional. "we recast the variational formulation of implicit Euler"
- velocity projection: A post-processing step that minimally adjusts velocities to satisfy momentum conservation constraints. "Velocity Projection"
Collections
Sign up for free to add this paper to one or more collections.