- The paper introduces a multi-layer barrier adaptive STA that achieves uniform ultimate boundedness by dynamically modulating gains in response to disturbances.
- It employs an eigenvalue-preserving discretization technique to mirror continuous-time stability and effectively minimize discretization-induced chattering.
- Simulation results demonstrate robust closed-loop performance and provide insights into parameter sensitivity, including sampling time, barrier width, and layer count.
Multi-layer Barrier Adaptation in Discrete-Time Super-Twisting Control
Introduction
The discrete-time implementation of higher-order sliding mode control schemes, particularly the super-twisting algorithm (STA), raises intricate challenges concerning robustness to disturbances, regulation accuracy, and the suppression of discretization-induced chattering. The super-twisting controller is widely valued in continuous-time systems for enforcing finite-time convergence of the sliding variable without the requirement for its derivative, and for implicitly attenuating high-frequency chattering. However, these properties do not automatically carry over to digital control systems, given the additional complexity of inter-sample blindness and quantization artifacts injected by sampling. This work presents a formal discrete-time formulation of a multi-layer barrier-based adaptive STA, leveraging an eigenvalue-preserving discretization method to systematically extend the adaptation and robustness advantages of recent continuous-time multi-barrier STA schemes into the digital domain.
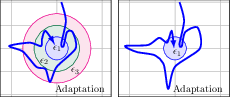
Figure 1: Conceptual illustration of three-layer barrier architecture (left) with step disturbances compared to single-layer barrier function (right).
The system under consideration is a perturbed integrator, described by
s˙=u+d(t)
and control is exerted via a non-homogeneous super-twisting algorithm. Prior research established that the modulation of super-twisting gains by a state-dependent barrier function ensures uniform ultimate boundedness (UUB) with respect to unknown but bounded disturbances. The gains take the form
k1,α(s)=(ϵ−∣s∣)α+1∣s∣,k2,α(s)=k1,α(s)2
where ϵ defines the barrier width and α the homogeneity exponent. The resulting closed-loop system achieves disturbance rejection adaptively, without a priori upper bound knowledge, and ensures system states remain inside an adaptively shrinking boundary in the presence of time-varying perturbations [gonzalez_final_2024, obeid_barrier_2020].
Multi-Layer Architecture and Stability
While single-barrier adaptive formulations are robust, their performance is fundamentally limited by inter-sample "blind" intervals in discretized implementations, during which perturbations can drive the sliding variable out of the prescribed ultimate bound. The multi-layer design divides the state space into nested regions, each region associated with its own barrier parameter ϵi and corresponding STA gains, orchestrated by a structured switching algorithm that hierarchically modulates the adaptation law.
Upon departure from the most accurate region due to fast disturbances or large inter-sample gaps, higher barrier layers are activated, confining the sliding variable to the outermost activated region, while convergence to the innermost layer is restored as soon as the perturbation subsides. The switching protocol ensures that each region possesses a distinct UUB bound, and monotone transitions between layers do not undermine global stability. The architecture preserves UUB under arbitrary switching, with the ultimate performance dictated by the highest-activated layer. The conceptual hierarchy is illustrated in Figure 1.
Discrete-time Implementation via Eigenvalue Matching
Classical Euler or Tustin-based discretization of the STA frequently leads to severe chattering and a departure from continuous-time performance envelopes. This work utilizes an eigenvalue-based discretization that preserves the eigenstructure of the system's continuous-time dynamics at the sampling level [koch_discrete-time_2019]. The STA is rewritten in Rosenbrock form, allowing for exact placement of discrete-time closed-loop poles matching those of the continuous-time system, thus maintaining stability and system response properties across sampling intervals.
Given the closed-loop state matrix Mα(s), the discretized map is constructed as
λ1,2(q)=exp(λ1,2Ts)
where λ1,2 are the (potentially state-dependent) eigenvalues of Mα(s), and Ts is the sampling period. Layer activation and gain selection logic is executed per sample. Discrete-time control inputs are subsequently defined to guarantee that the response inside each barrier region mirrors the continuous-time trajectory, up to sampling effects.
Numerical Results and Sensitivity Analysis
Systematic simulations were conducted to evaluate closed-loop performance, with particular emphasis on sensitivity to parameter variations (k1,α(s)=(ϵ−∣s∣)α+1∣s∣,k2,α(s)=k1,α(s)20, k1,α(s)=(ϵ−∣s∣)α+1∣s∣,k2,α(s)=k1,α(s)21), sampling interval k1,α(s)=(ϵ−∣s∣)α+1∣s∣,k2,α(s)=k1,α(s)22, and the number of nested barriers k1,α(s)=(ϵ−∣s∣)α+1∣s∣,k2,α(s)=k1,α(s)23.
Nominal Performance: Under severe, high-frequency disturbances, multi-layer adaptation ensures both rapid recovery of the sliding variable and minimization of tracking error, with the sliding mode maintained predominantly within the smallest prescribed barrier.
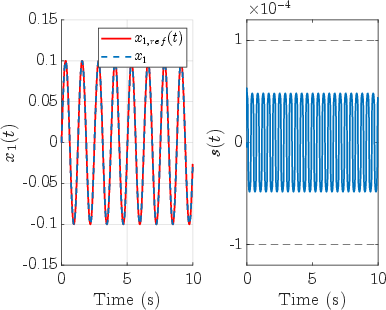
Figure 2: Nominal performance under perturbation k1,α(s)=(ϵ−∣s∣)α+1∣s∣,k2,α(s)=k1,α(s)24.
Parameter k1,α(s)=(ϵ−∣s∣)α+1∣s∣,k2,α(s)=k1,α(s)25 Sensitivity: Tuning k1,α(s)=(ϵ−∣s∣)α+1∣s∣,k2,α(s)=k1,α(s)26 modulates the balance between convergence speed and aggressiveness of gain adaptation. Small k1,α(s)=(ϵ−∣s∣)α+1∣s∣,k2,α(s)=k1,α(s)27 yields under-constrained dynamics, frequent activation of outer layers, and weaker convergence. Large k1,α(s)=(ϵ−∣s∣)α+1∣s∣,k2,α(s)=k1,α(s)28 induces rigid, over-constrained behavior, increasing gain-induced chattering and activation of higher barrier layers. There exists a non-trivial, application-specific optimal regime.
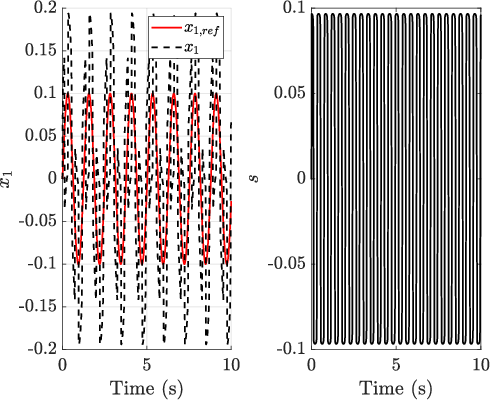
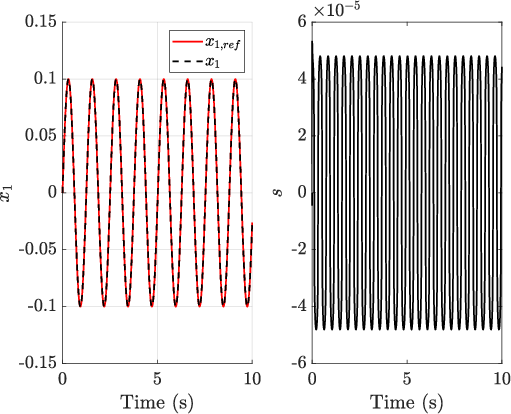
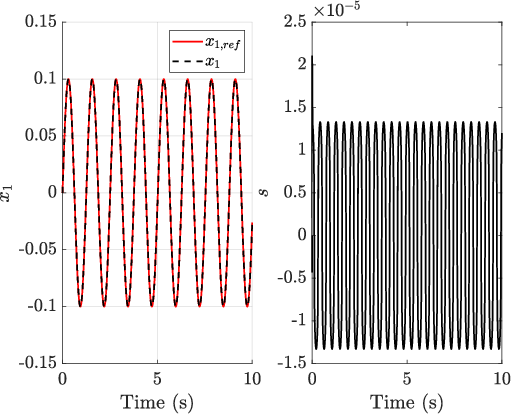
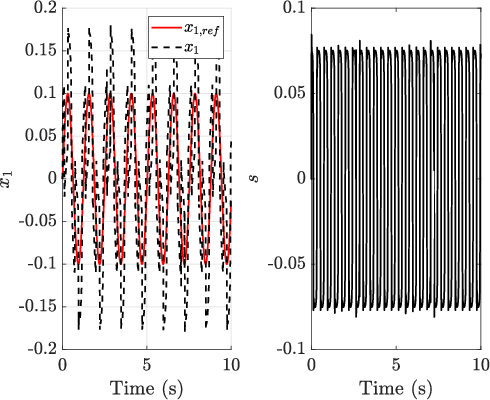
Figure 3: System performance under perturbation k1,α(s)=(ϵ−∣s∣)α+1∣s∣,k2,α(s)=k1,α(s)29 for ϵ0.
Barrier Size Sensitivity: Diminishing the innermost barrier ϵ1 tightens steady-state accuracy at the cost of amplified control gains and control signal activity; excessively small ϵ2 can induce limit cycling due to quantization and chattering, driving the system into outer barrier layers.
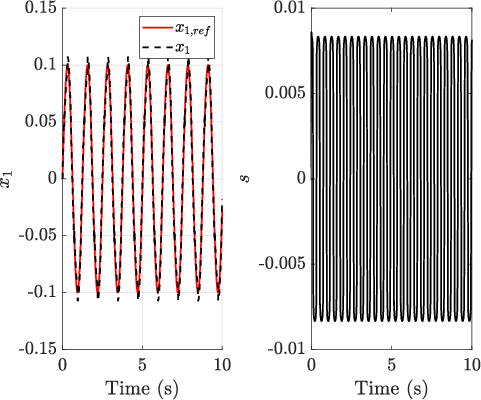
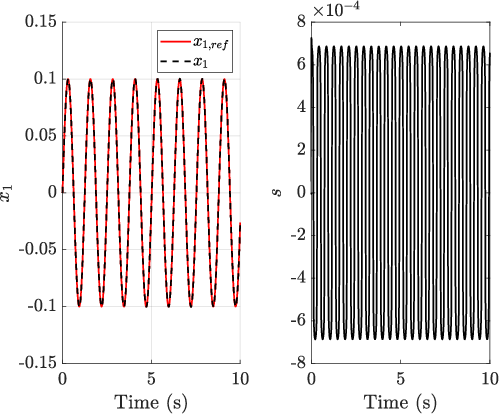
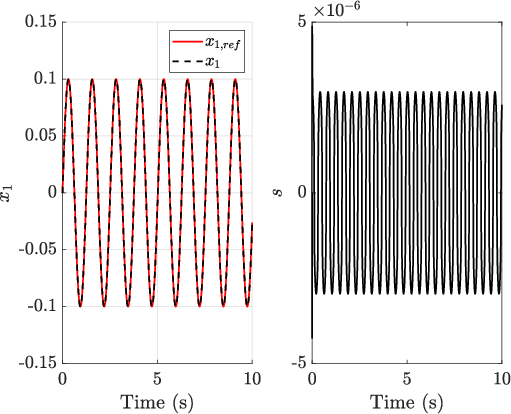
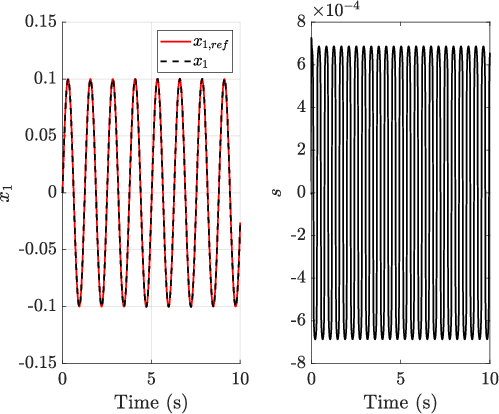
Figure 4: System performance under perturbation ϵ3 for ϵ4.
Sampling Time Sensitivity: The effect of sampling period ϵ5 is pivotal; as ϵ6 increases, inter-sample blindness exacerbates barrier violations, with the sliding variable escaping to outer layers during unsensed disturbance transients. Sufficiently small ϵ7 maintains trajectories within the innermost bound.
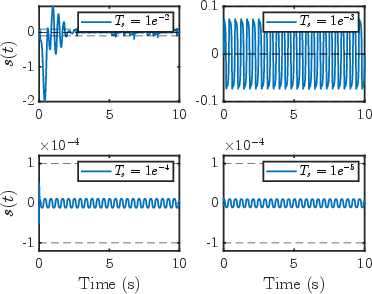
Figure 5: Performance under reduced amplitude perturbation for ϵ8.
Number of Barriers ϵ9: Expanding the number of nested layers mediates discretization-induced performance loss: higher α0 enables finer partitioning, faster recovery from state deviations, and improved steady-state precision. However, large α1 can heighten switching activity and increase the potential for chattering.
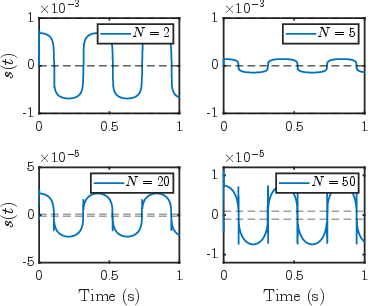
Figure 6: Performance under perturbation for α2 with α3.
Cross-sensitivity: Increasing α4 offers a practical mitigation pathway for performance loss at larger α5, as closer spacing of barriers reduces the effective gap through which disturbances can affect constraint violations between samples, albeit with rising switching frequency.
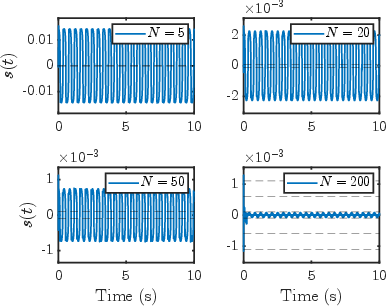
Figure 7: Performance under reduced amplitude perturbation for α6.
With sufficiently large α7, even at high α8, the architecture guarantees that ultimate boundedness remains near the nominal specification:
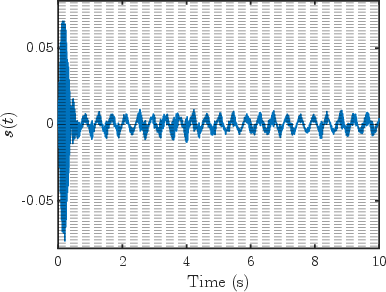
Figure 8: Performance under reduced amplitude perturbation for α9 and ϵi0.
Theoretical and Practical Implications
The presented architecture achieves robust, bounded regulation under severe discrete-time actuation conditions without knowledge of disturbance bounds, addressing long-standing gaps in practical adaptive STA implementations. The theoretical contribution is in the marriage of eigenvalue-preserving discretization with nested gain adaptation—extending single-barrier, continuous-time UUB proofs to the digital domain, as corroborated with high-fidelity simulations. Practically, the method establishes explicit design trade-offs among accuracy, chattering, and real-time feasibility (sampling budget, switching frequency). The results directly inform digital hardware implementations of sliding-mode systems in high-precision, disturbance-rich environments such as electromechanical positioning, robotics, and power electronics.
Future Directions
Future research should target further reduction of inter-layer chattering, possibly via hysteresis or switching penalty schemes, and analytical quantification of the minimum barrier separation required for prescribed robustness under quantization and sampling uncertainties. Extending the methodology to MIMO nonlinear systems with non-integrator structures, as well as experimental validation on real platforms, are direct next steps. The framework also invites investigation of co-adaptation strategies, where barrier boundaries themselves are treated as tunable parameters subject to online optimization.
Conclusion
This study formalizes the discrete-time realization of the multi-layer barrier adaptive super-twisting controller, addresses sensitivity to all significant tuning parameters, and bridges the adaptation and robustness properties between continuous- and discrete-time sliding mode control, setting foundations for resilient digital control in the presence of aggressive disturbances and finite sampling constraints (2604.25527).

