- The paper introduces a unified SMC-C3BF framework that integrates sliding mode control with collision cone barrier functions for safe trajectory tracking.
- It reformulates robot kinematics into strict-feedback form, enabling robust finite-time convergence under disturbances and dynamic obstacle avoidance.
- Experimental results on Ackermann, Turtlebot, and drone platforms validate minimal tracking errors and reliable collision avoidance in real-time.
Sliding Mode Control for Safe Trajectory Tracking with Moving Obstacles: Experimental Validation on Planar Robots
The paper introduces a generalized kinematic transformation framework for planar robots—including Ackermann-steered vehicles, differential-drive robots, and aerial platforms—enabling their dynamics to be recast into strict-feedback form. This conversion facilitates a versatile design of Sliding Mode Control (SMC) laws without structural constraints for the underlying vehicles. By defining an alternative velocity vector and maintaining uniform nonsingularity and boundedness in the input matrix, the authors overcome the degeneracy issues prevalent in feedback linearization approaches for common non-holonomic platforms.
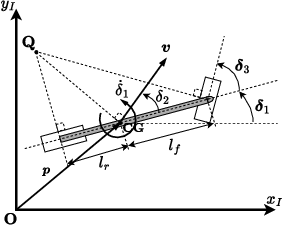
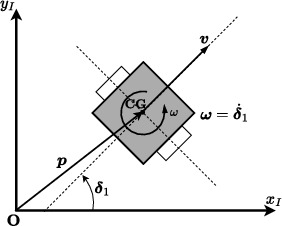
Figure 1: Ackermann drive schematic used in hardware validation.
Sliding Mode Tracking Controller Design
The SMC strategy employs a canonical sliding surface defined over tracking errors e1 and e2, where the control law incorporates both nominal and robust switching components. This guarantees finite-time convergence to the trajectory manifold even in the presence of matched, bounded disturbances. Gain selection leverages strict matrix norm bounds derived from vehicle kinematics, ensuring theoretical and practical convergence. The practical SMC formulation replaces the signum function with a boundary-layer saturation to mitigate control chattering, yielding improved robustness in hardware deployments.
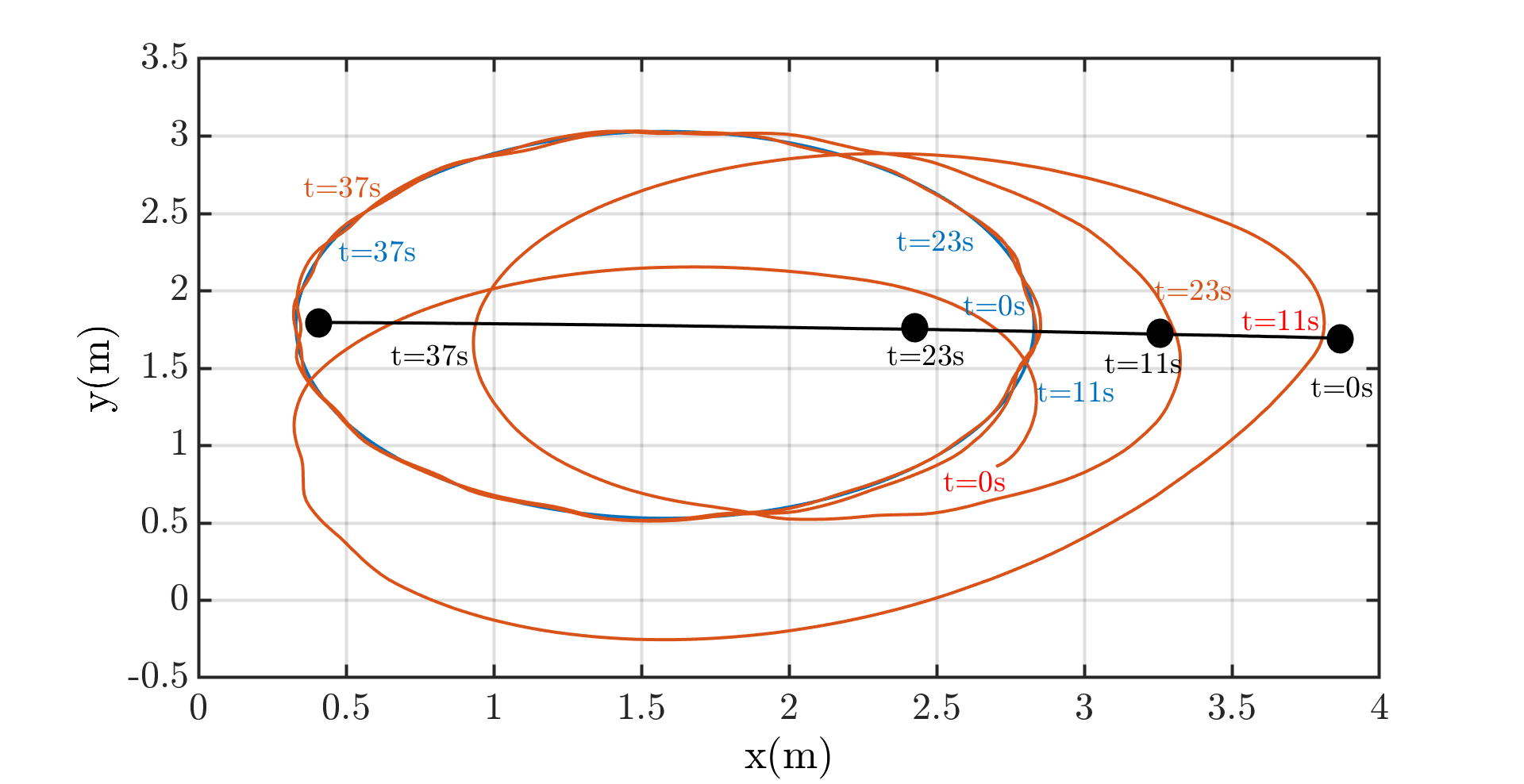
Figure 2: Ackermann drive: Reference vs. actual trajectory under SMC with obstacle avoidance.
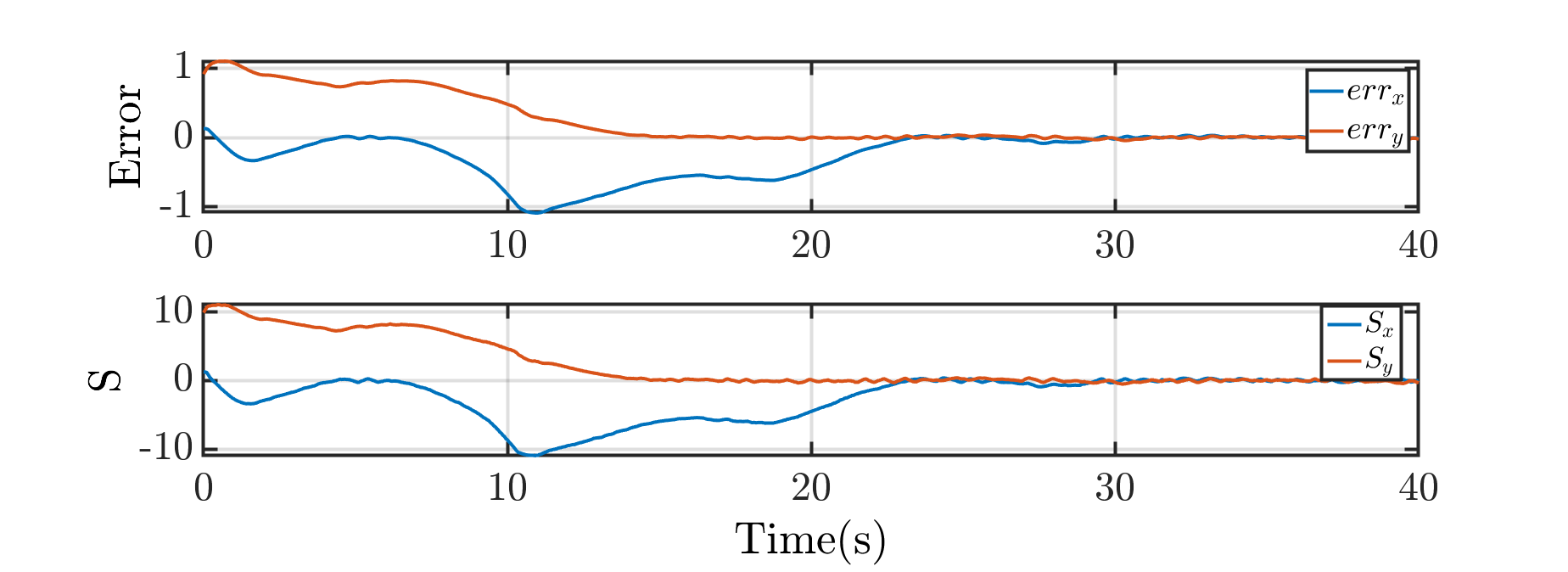
Figure 3: Ackermann drive: Sliding surface and error time histories confirming robust convergence.
Safety Enforcement via Collision Cone CBF
To guarantee collision avoidance with moving obstacles, the authors integrate a Collision Cone Control Barrier Function (C3BF) safety filter into the control architecture. Unlike conventional distance-based or static CBFs, C3BF leverages the relative geometry and velocities between ego and obstacle, ensuring the forward invariance of a dynamically defined safe set. Actuator and model-regularity constraints are enforced as soft robust barrier constraints within the quadratic program (CBF-QP), accommodating both kinematic and operational bounds for each vehicle type.
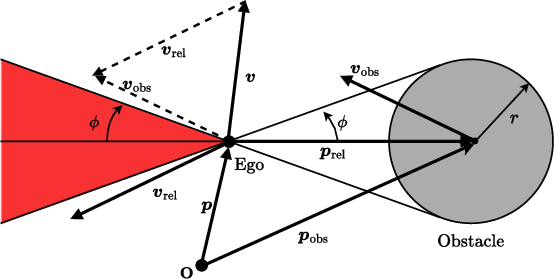
Figure 4: Construction of collision cone for moving obstacle avoidance with vehicle geometry.
Hardware and Simulation Case Studies
Extensive validation is provided on three platforms:
- Ackermann Drive (F1Tenth Hardware): The SMC-C3BF approach demonstrates precise tracking and real-time maneuvering with active obstacle avoidance. Numerical results show that tracking error remains within boundary layers, and trajectory deviation due to the safety filter is minimal.
- Differential Drive (Turtlebot Hardware): The nonsingular terminal SMC is applied for complex reference trajectories with dynamic circular obstacle avoidance. The C3BF-QP safety filter consistently maintains collision-free operation.
- Drone Simulation (Gazebo): Planar double-integrator dynamics allow direct application of the controller; the drone reliably tracks reference orbits and avoids moving obstacles in simulated altitude hold mode.
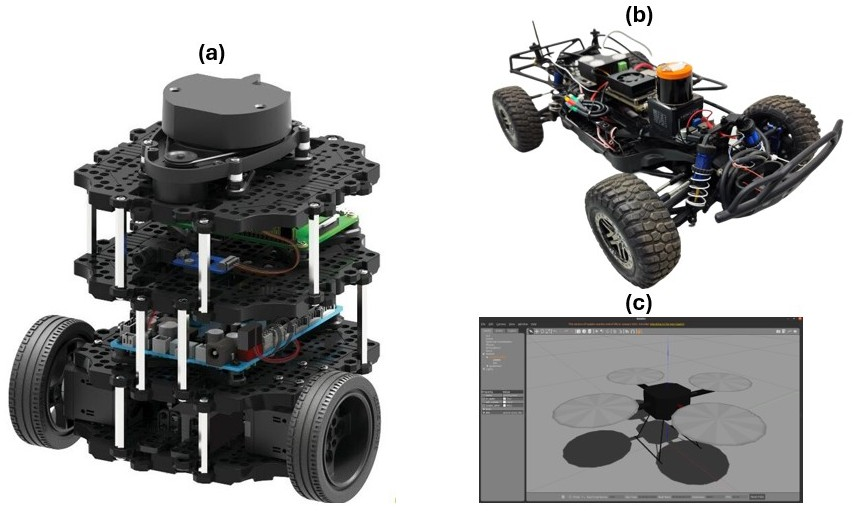
Figure 5: Robots used for validation: Turtlebot, F1tenth Ackermann car, and drone in Gazebo.
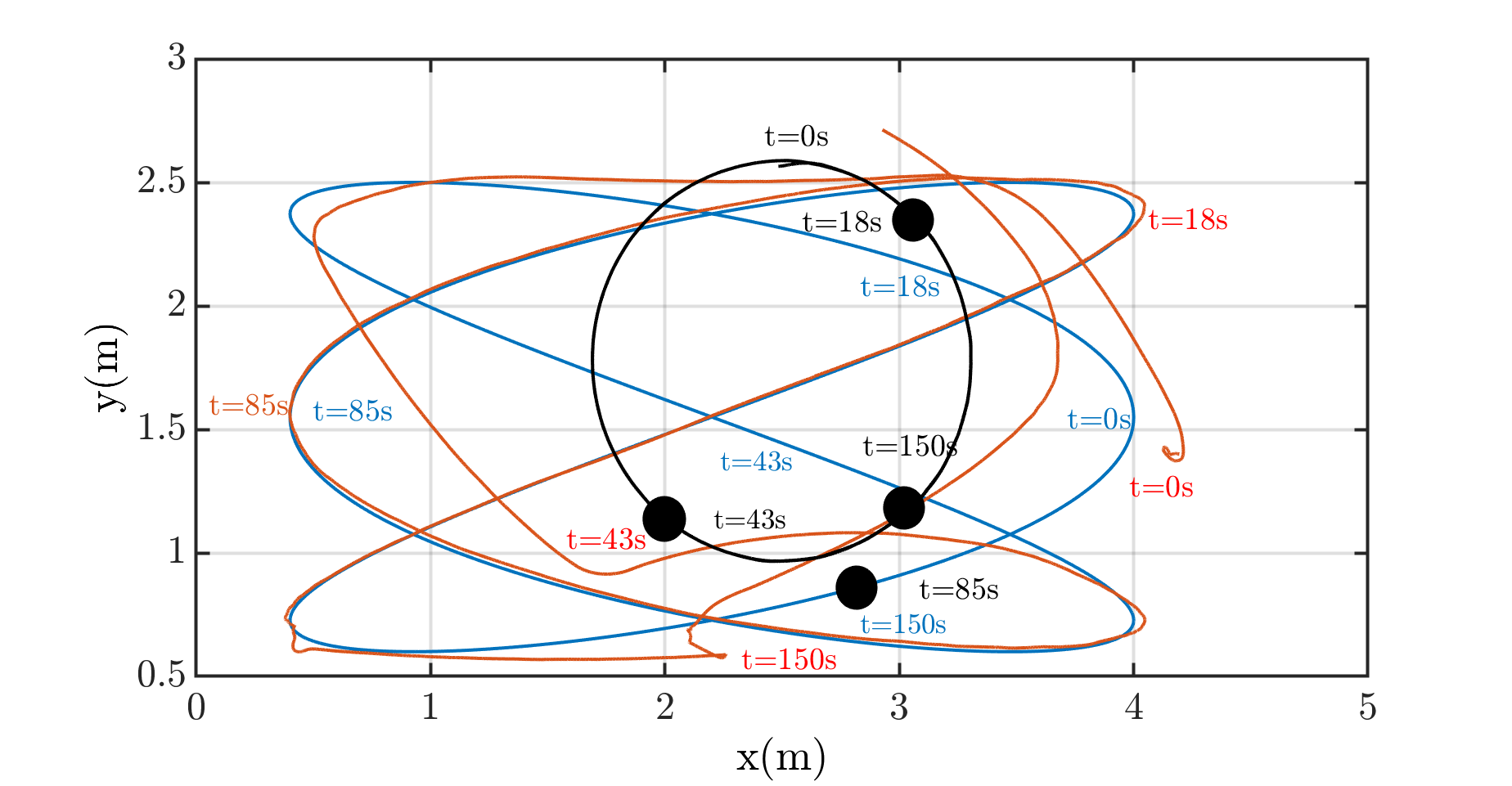
Figure 6: Differential drive: Reference vs. actual trajectory with live obstacle avoidance.
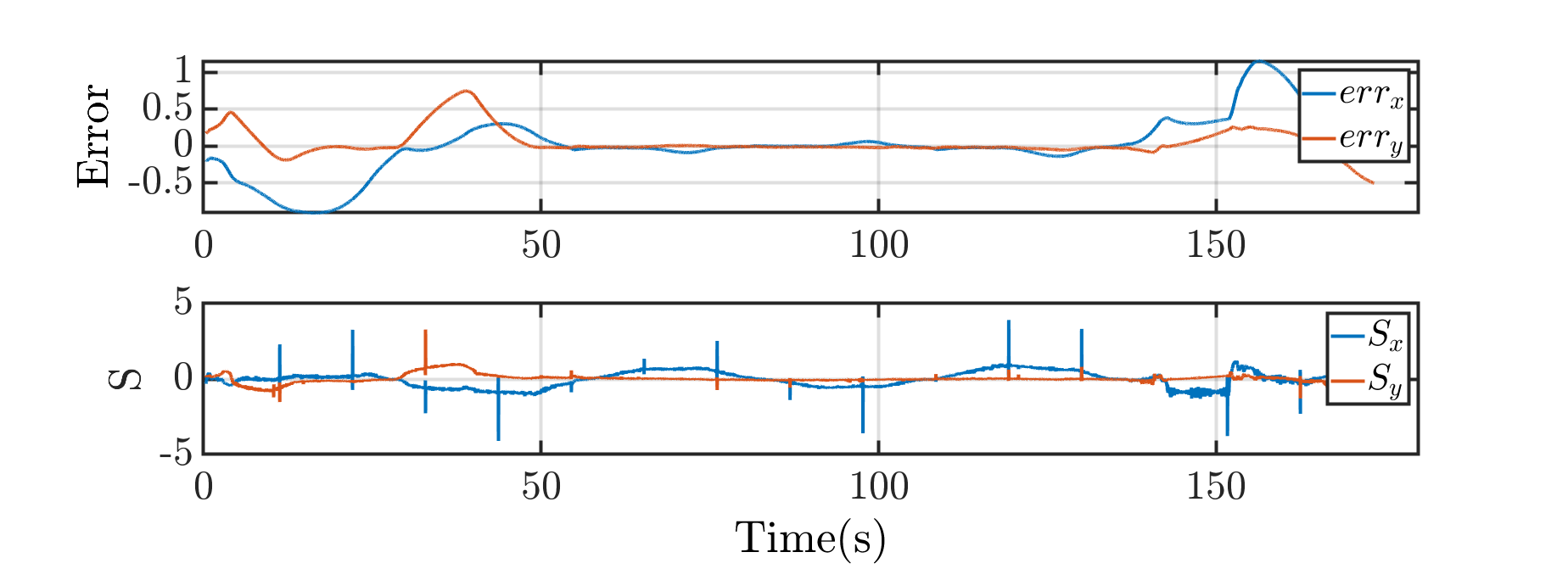
Figure 7: Differential drive: Sliding surface and error time histories validating convergence and safety.
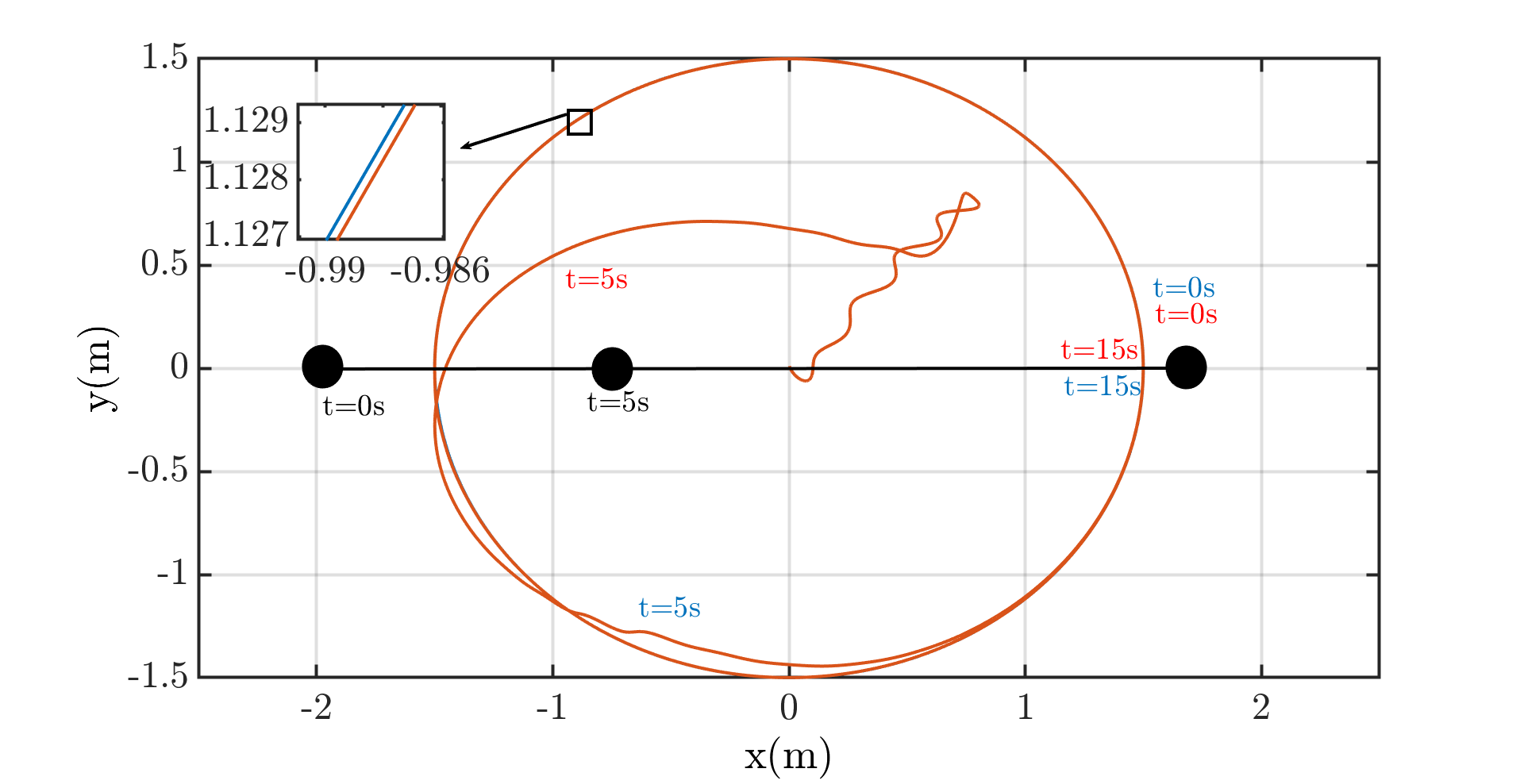
Figure 8: Drone: Reference vs. actual trajectory and time histories under SMC-C3BF control.
Numerical Outcomes and Contradictory Claims
Across all evaluations, the framework achieves strictly enforced collision avoidance while preserving asymptotic tracking performance under external disturbances. The paper notably claims—contradicting earlier works [LIU2020103]—that robust SMC-based trajectory tracking for Ackermann steering has not previously been experimentally validated in the context of moving obstacle avoidance via CBFs. Strong numerical evidence supports the claim, as all experimental trajectories satisfy the safety constraints and converge robustly without violating actuator limits.
Practical and Theoretical Implications
Practically, the integrated SMC–C3BF framework enables deployment in safety-critical applications—AGVs, drones, and automotive platforms—where precise tracking and verified collision avoidance under uncertainty is mandatory. Theoretically, the conversion to strict feedback form and application of C3BFs create a foundation for further dual-objective control architectures. The inclusion of model-regularity constraints in CBF-QPs enables feasible real-time implementation with hardware-ready robustness margins.
Future Directions in AI-Enabled Robotics
Potential extensions include input-to-state safe CBFs for less conservative operation, disturbance observer–based CBFs for tighter robustness bounds [wangdisturbed], and scalable synthesis for multi-agent environments. Integration with learning-based planners for autonomous vehicles navigating highly dynamic scenarios remains an open trajectory. The framework sets a precedent for unifying robust trajectory tracking and active safety across broad robot morphologies.
Conclusion
The paper establishes a unified control strategy combining canonical sliding mode design with collision cone-based CBFs. This architecture is theoretically rigorous and empirically validated for diverse planar robotic platforms, exhibiting robust tracking and strict safety in dynamic environments. The introduction and validation of an SMC-C3BF approach for Ackermann-steered vehicles, differential-drive robots, and drones offer a practical foundation for safe autonomous navigation in real-world, disturbance-rich domains.
(2604.24518)