- The paper introduces AsyncShield, a plug-and-play edge adapter that uses spatial re-projection to realign delayed VLA intents and correct odometry drift.
- It formulates edge adaptation as a CMDP, balancing trajectory fidelity and safety with PPO-Lagrangian optimization under varying network conditions.
- Empirical results demonstrate high success rates and low collision risk across diverse platforms, even under severe network degradation.
AsyncShield: A Plug-and-Play Edge Adapter for Asynchronous Cloud-based VLA Navigation
Motivation and Problem Statement
Vision-Language-Action (VLA) models have demonstrated robust zero-shot generalization in embodied navigation and manipulation but are predominantly deployed on cloud infrastructure due to their extensive parameterization and computational demands. This deployment paradigm introduces systemic cloud-to-edge latencies and inference jitters, leading to spatiotemporal misalignment between semantic intent generation and physical execution. In mobile navigation, particularly under continuous displacement, this misalignment is catastrophic: stale intents processed at the edge may describe spatially hazardous trajectories, precipitating collisions and task failures. Conventional asynchronous control strategies—action chunking (RTC), residual RL correction (A2C2), and black-box time-series prediction—are fragile under irregular, long-tail network degradation, as they negligently smooth or fit outdated semantic commands without explicit spatial rectification.
AsyncShield Architecture and Spatio-Temporal Realignment
AsyncShield introduces an analytic, deterministic solution for latency-induced intent misalignment. Departing from black-box temporal prediction, it maintains a temporal pose buffer at the edge, tracking odometry in world-to-ego coordinates at high frequency. Upon receipt of delayed VLA-generated waypoints, an SE(2) kinematic transformation explicitly computes spatial offsets, realigning intents from the anchor ego frame to the current frame:
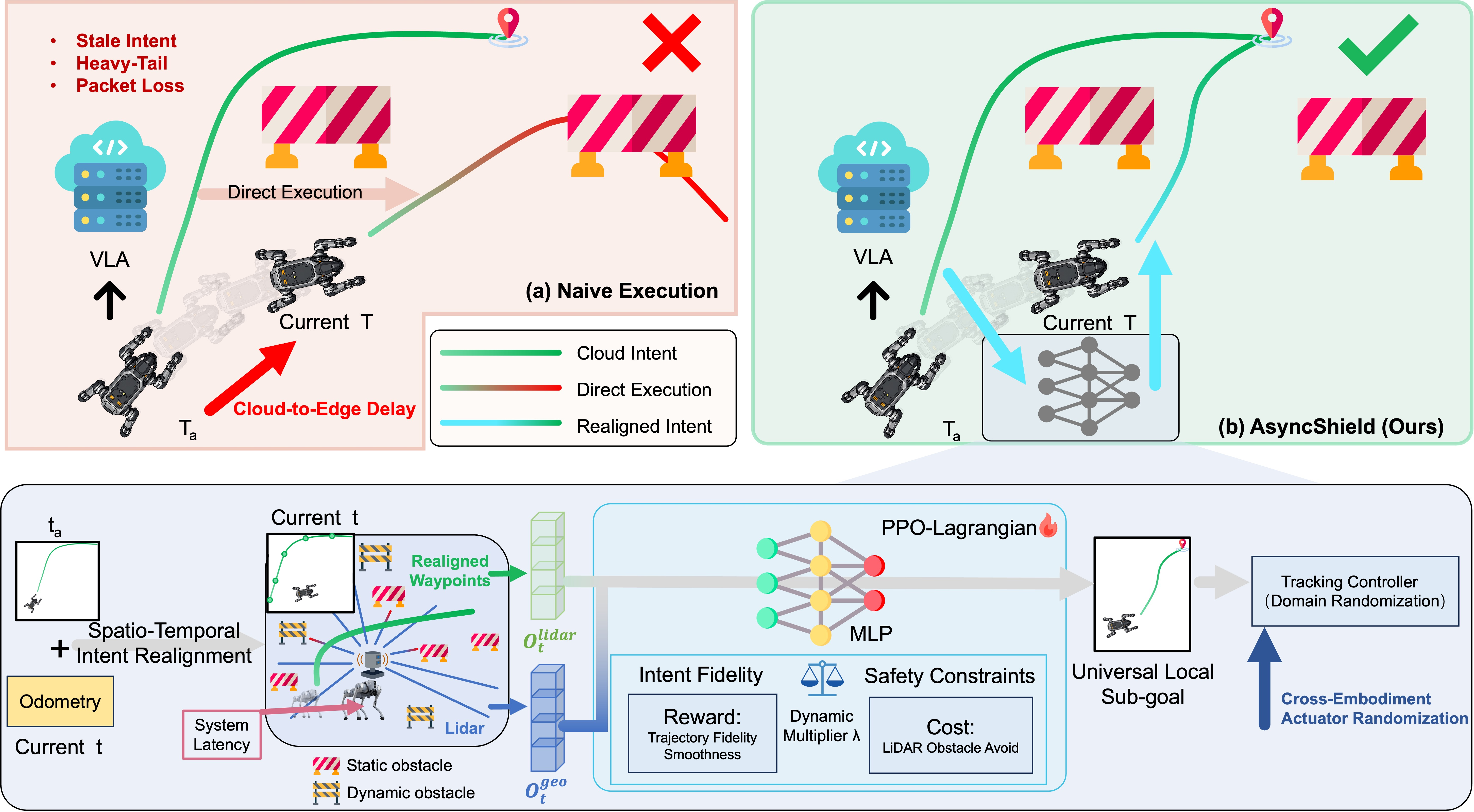
Figure 1: Overview of the AsyncShield framework showing the pose buffer, spatio-temporal realignment, CMDP-based RL adapter, and plug-and-play actuator randomization pipeline.
This geometric re-projection confines odometry drift to single communication cycles, resetting spatial errors upon new intent arrival, and preventing global divergence. The resultant realigned waypoints serve as geometric anchors for subsequent closed-loop execution.
To achieve adaptive fidelity between intent restoration and obstacle avoidance, AsyncShield formalizes edge adaptation as a constrained Markov decision process (CMDP) with dual optimization objectives: maximizing trajectory intent fidelity (reward JR) and enforcing hard safety constraints (cost JC).
State vector comprises geometric look-ahead features and 2D LiDAR proximity data, yielding universal local sub-goal actions agnostic to underlying robot kinematics. PPO-Lagrangian optimization dynamically adjusts the balance parameter λ, prioritizing safety when stale intents carry collision risks. The RL Adapter thus facilitates continuous intent tracking in free space and autonomous deviation in threat proximity, decoupling task fidelity from physical safety.
Plug-and-Play Generalization: Domain and Embodiment Randomization
A critical design feature is domain randomization across actuators and perception. During training, stochastic system latencies, acceleration limits, dynamic/physical noise, and systematic angular biases are injected, enforcing cross-chassis robustness. Universal sub-goal interfaces and perception-level collision radius inflation further ensure seamless policy transfer to heterogeneous mobile platforms without retraining or VLA fine-tuning. The plug-and-play property is confirmed through both simulation and hardware deployments.
Empirical Evaluation: Robustness, Safety, and Efficiency
Comprehensive evaluations are conducted across ideal and degraded network conditions. AsyncShield consistently achieves superior task completion (SR up to 80.0% in ideal, 76.7% in mixed degradation) and minimal risk exposure rates (RER <1.3%), outperforming RTC and A2C2 which degrade significantly under stochastic latency.
An emergent navigation paradigm is observed: baseline smooth action chunking (RTC) records lowest cross-track error (CTE) but highest collision risk, validating that blind intent tracking is suboptimal in dynamic environments. AsyncShield demonstrates optimal trade-off, marginally increasing CTE due to proactive safety deviation but substantially boosting success rates.
Qualitative trajectory analysis further elucidates system behaviors:
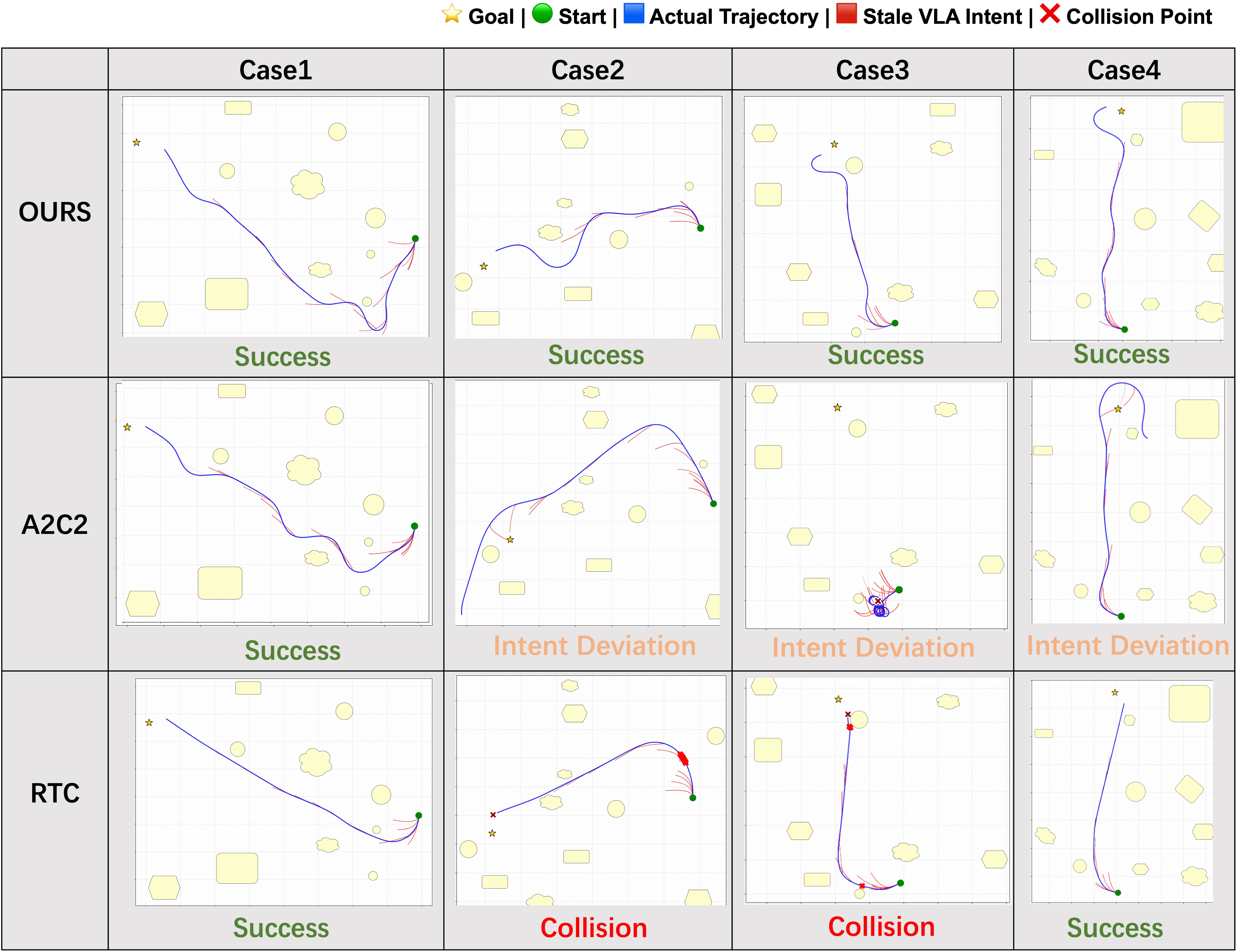
Figure 2: Trajectory visualizations illustrating robust intent restoration and collision avoidance by AsyncShield versus RTC and A2C2 under severe network degradation.
Ablation studies substantiate architectural necessity: disabling temporal alignment or RL adaptation severely impairs success rates and tracking accuracy, while omitting safety constraints markedly escalates collision exposure.
Cross-Embodiment and Real-World Zero-shot Deployment
AsyncShield's universal policy is deployed onto morphologically distinct simulated agents—quadruped (Doggo) and Ackermann car—demonstrating minimal variance in SR and RER, attributed to perception-level collision radius inflation. Real-world tests on Unitree Go2 quadruped, interfacing with multiple SOTA VLA models (SocialNav, TrackVLA, Nav-R2), confirm plug-and-play compatibility and high resilience (80–90% SR) under extreme network jitter, without cloud-side fine-tuning. The robot adapts real-time trajectories, prioritizing safety under persistent latency and unstable wireless communication.
Implications and Future Directions
AsyncShield's deterministic spatial mapping formulation offers a paradigm shift in asynchronous embodied navigation, decoupling latency correction from implicit neural prediction and enabling real-time safety-critical adaptation. Practically, this architecture enables large-scale cloud deployment of VLA models in dynamic real-world environments, ensuring robust physical safety and fidelity without retraining or model modification.
Theoretically, the analytic geometric re-projection mechanism and CMDP-based adaptive RL pave the way for further research on distributed multimodal embodied intelligence, cross-platform deployment pipelines, and hierarchical latent state alignment. Future efforts could extend spatial mapping into complex 3D environments, integrate lightweight multimodal perception models at the edge for redundancy, and explore hierarchical fusion with world models for long-horizon foresight.
Conclusion
AsyncShield establishes a deterministic, lightweight, and universal edge adaptation framework for asynchronous cloud-based VLA navigation. Through explicit spatio-temporal intent realignment and CMDP-optimized safety adaptation, it eliminates catastrophic misalignment endemic to naive chunking and residual fitting paradigms, guaranteeing robust task completion and physical safety in dynamic, latency-prone environments. Its plug-and-play generalization enables cross-embodiment and real-world zero-shot deployment, facilitating practical integration of large foundation VLA models for mobile robots without fine-tuning, and offering a scalable blueprint for safe, robust embodied AI deployment in real-world operational contexts (2604.24086).

