- The paper introduces DMF by augmenting standard drifting models with a friction mechanism to bound cumulative error over finite steps.
- The paper rigorously characterizes contraction thresholds and establishes equilibrium identifiability for the Gaussian kernel using surrogate dynamics.
- The paper empirically demonstrates DMF’s efficiency in FFHQ domain translation, achieving competitive FID/CMMD metrics with 16× less training compute.
Introduction and Context
This paper introduces the Drifting Model with Friction (DMF), a novel variant of Drifting Models (DMs), for generative modeling. DMs operate by iteratively evolving generated samples under a kernel-based drift field comprised of an attraction force towards the data distribution and a repulsion force among generated samples. DMF augments this mechanism by introducing a friction coefficient, leading to a bounded cumulative error and improved empirical performance. The analysis and experimental results highlight both the theoretical advances—contraction threshold characterization, identifiability at equilibrium (in the Gaussian kernel case)—and DMF's practical efficiency in domain translation tasks.
Drift Field Dynamics and Stability
The DM drift field is formulated as Vp,q(x)=Vp+(x)−Vq−(x), with Vp+ attracting to the data and Vq− repelling intra-batch samples, each defined via kernel-weighted expectations. The Laplace kernel, k(x,y)=exp(−∥x−y∥/τ), is employed for weighting. Central to the analysis is a two-particle unnormalized surrogate, which isolates the competition between attraction and repulsion, offering tractable closed-form expressions for stability.
A key result is the characterization of the contraction threshold: for inter-particle distances a<τln2, repulsion overpowers attraction, resulting in locally divergent error dynamics with a non-zero fixed point (a∗=τln2). The monotonic convergence properties and the phase portrait of these dynamics are explicitly demonstrated.
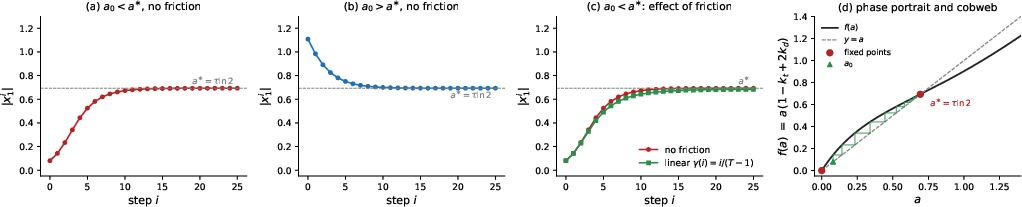
Figure 1: Two-particle surrogate dynamics with τ=1, showing stable and unstable regimes, trajectory freezing via friction, and fixed-point structure.
Friction Augmentation and Cumulative Error Bounds
Motivated by the analogy to underdamped mechanical systems, DMF introduces a linearly scheduled friction coefficient γ(i), scaling the drift field by 1−γ(i). This modification bounds the cumulative error trajectory for a fixed finite horizon T. The per-step growth factor and cumulative error bounds are rigorously established: for a schedule Vp+0, the error at step Vp+1 is bounded by Vp+2, where Vp+3 is the uniform upper bound on the instability margin. Critically, this establishes control over divergence in the locally repulsive regime without extending the contraction region.
Identifiability at Equilibrium
An outstanding theoretical question is the identifiability of equilibrium: does Vp+4 imply Vp+5 (converse of Proposition 3.1 in (Deng et al., 4 Feb 2026))? The paper closes this gap for the Gaussian kernel via a log-gradient identity, real-analyticity arguments, identity theorem for real-analytic functions, and injectivity of the Gaussian convolution in Fourier space. This rigorously establishes that vanishing drift on any open subset forces Vp+6.
Empirical Evaluation: Domain Translation
DMF is empirically evaluated on FFHQ domain translation (adult Vp+7 child). The method achieves results competitive with, and in some metrics superior to, Optimal Flow Matching (OFM), but at approximately Vp+8 lower training compute. Quantitative metrics include FID and CMMD, and qualitative assessments demonstrate DMF's improved preservation of identity features compared to baseline DMs.

Figure 2: FFHQ adult-to-child domain translation for six subjects—comparison of original, DM, DMF (linear schedule), and OFM output images.
Strong numerical results are reported:
- 2D Gaussian Vp+9 mixture toy: DMF achieves FD of 0.0026, outperforming DM (0.0726) and OFM (0.0029).
- FFHQ translation: DMF yields FID 10.5810 and CMMD 0.0073 versus OFM (FID 10.6282, CMMD 0.0131) and DM (FID 11.9357, CMMD 0.0238), with DMF training time matching DM (Vq−0 min) and far below OFM (Vq−1 min).
Implications and Future Directions
The theoretical analysis of DMF yields important insights:
- The friction mechanism does not extend the per-step stability region but provides finite-horizon control over error accumulation and trajectory divergence.
- Identifiability is rigorously established only for the Gaussian kernel; extension to Laplace kernel remains open.
- The empirical results demonstrate practical value in reducing compute for domain translation with high sample fidelity and attribute preservation.
Practical implications include the possibility of scaling DMF to larger datasets or more complex generative tasks, while theoretical implications invite further exploration of convergence rates, kernel extensions, and learned/friction schedules.
Speculative directions involve:
- Establishing identifiability and convergence guarantees for the Laplace kernel, which is used in practice for DM/DMF.
- Rigorous analysis connecting the two-particle surrogate dynamics to full-batch, neural-network-parameterized models and global distributional convergence.
- Exploration of adaptive, data-dependent friction schedules and their impact on training dynamics.
Conclusion
"Attraction, Repulsion, and Friction: Introducing DMF" (2604.18194) offers a mathematically rigorous framework for analyzing stability and equilibrium in Drifting Models, introduces friction as an effective mechanism for bounding cumulative error, and empirically validates DMF's efficiency and quality in domain translation tasks. The theoretical advances—including contraction thresholds, finite-horizon error control, and equilibrium identifiability (Gaussian kernel)—and the practical improvements in training compute and metric scores suggest promising avenues for further research in both generative modeling theory and scalable implementation.