- The paper introduces a fully differentiable monocular SLAM pipeline that integrates dense optical flow with Gaussian splatting for robust pose estimation and dense 3D reconstruction.
- It leverages closed-form analytic gradients and error-based Gaussian management to mitigate geometric ambiguities and improve photorealistic rendering quality.
- Experimental results on EuRoC and TUM benchmarks demonstrate superior tracking accuracy and high visual fidelity, outperforming competing monocular SLAM methods.
Monocular 3D Gaussian Splatting SLAM with Optical Flow Guidance
Introduction and Motivation
Monocular SLAM methods leveraging differentiable scene representations have garnered significant interest owing to their capacity for dense, photorealistic reconstruction. However, Gaussian Splatting (3DGS)—which provides efficient, differentiable rasterization and competitive rendering fidelity—faces severe geometric ambiguities in monocular configurations due to the absence of robust depth priors. The paper “GaussianFlow SLAM: Monocular Gaussian Splatting SLAM Guided by GaussianFlow” (2604.15612) introduces an integrated framework (GaussianFlow SLAM) that directly utilizes dense optical flow as a geometry-aware supervisory signal, thereby regularizing both scene structure and camera trajectory estimation in a tightly coupled SLAM pipeline.
Methodology
Optical Flow–Guided Monocular 3DGS-SLAM
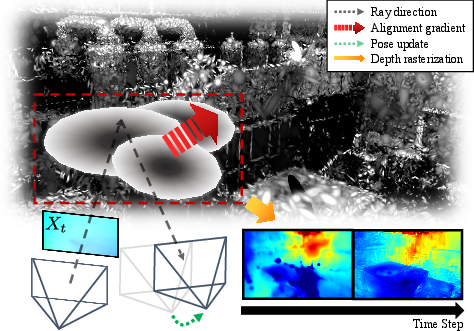
The core of GaussianFlow SLAM is the explicit alignment between the projected 3DGS scene motion (GaussianFlow) and network-predicted optical flow, yielding closed-form analytic gradients amenable to efficient GPU-based optimization. This mutual alignment constrains 3DGS geometry and enhances pose tracking, circumventing common pitfalls such as local minima that arise in the absence of reliable geometric cues.
The operational loop involves:
Tracking and Mapping Loop
The framework tightly alternates between:
- Pose Tracking: Initial poses for new keyframes are estimated by minimizing a joint photometric and GaussianFlow loss over multiple past and present frames.
- Mapping (3DGS Optimization): Poses are fixed while jointly optimizing the 3DGS map by integrating image, flow, isotropic, and opacity losses over multi-view windows.
- Dense Bundle Adjustment (DBA): Multi-pose optimization is performed in windows, using GaussianFlow as input for DBA, which is implemented with a ConvGRU-based recurrent flow estimation module.
This cyclical process facilitates geometric feedback between mapping and tracking: continuous 3DGS refinement reduces degenerate or biased trajectories, while improved camera poses enhance spatial consistency of the reconstructed scene.
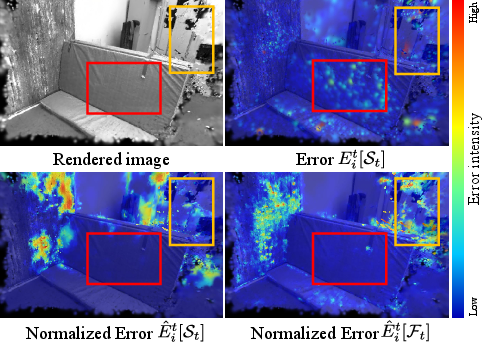
Error-Based Gaussian Management
Precise Gaussian management is essential to counteract underutilized or unstable components—“floaters”—that can manifest during iterative optimization.
Experimental Results
Datasets and Setup
Experiments were conducted on TUM RGB-D and EuRoC benchmarks, evaluating both camera tracking and 3DGS rendering fidelity. The full monocular pipeline was implemented with extensive kernel-level CUDA customizations for backpropagation efficiency.
Tracking and Mapping Results
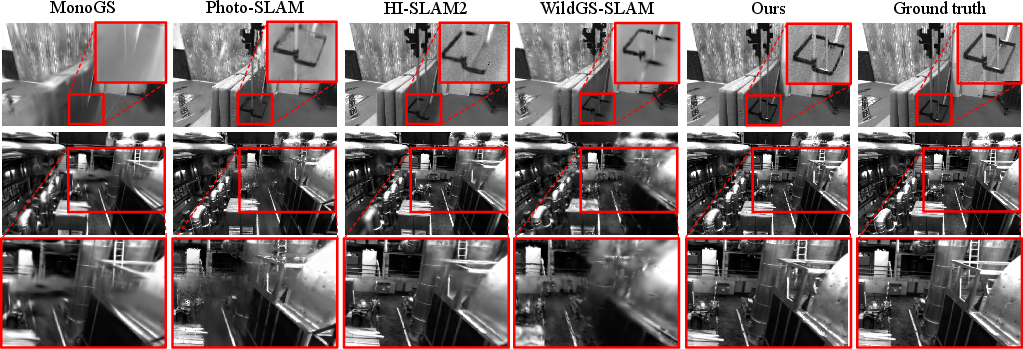
- On EuRoC (large-scale UAV and rapid motion), the proposed method consistently outperformed baselines MonoGS, MM3DGS-SLAM, Photo-SLAM, HI-SLAM2, and WildGS-SLAM in terms of absolute trajectory RMSE. Notably, the method showed superior robustness to local minima and erroneous pose trajectories, particularly in the absence or misalignment of monocular depth priors.
- On smaller-scale TUM, performance remained competitive, often matching or exceeding methods based on feature-based or network-predicted depth priors.
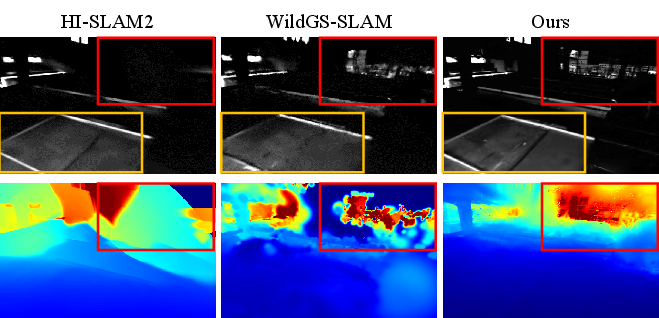
Figure 3: For challenging scenes, GaussianFlow SLAM produces geometrically accurate rasterized depths and visual fidelity, outperforming monocular depth-prior-based methods when depth quality is poor.
- Rendering quality, quantified by PSNR, SSIM, and LPIPS, favored GaussianFlow SLAM, especially on large and structurally complex sequences. It achieved highest perceptual quality (lowest LPIPS) across most test cases.
Ablation and Runtime
Theoretical and Practical Implications
This study establishes that integrating dense optical flow with analytic gradient support provides a viable route to closing the gap between high-fidelity geometrically consistent mapping and monocular SLAM pipelines. By leveraging kernel-level closed-form differentiation, the method avoids the memory and computational overheads associated with graph-based autodiff frameworks, enabling scaling to large maps and frequent joint updates.
The demonstrated superiority over depth-prior-guided or feature-tracking pipelines underscores the importance of dense, per-pixel geometric consistency. Practically, the proposed pipeline is suited to static or moderately dynamic environments where high rendering fidelity and robust pose estimation are required from minimal monocular data.
However, scalability to real-time rates remains impeded by the cost of tightly-coupled, first-order optimization; incorporation of efficient, second-order methods tailored for 3DGS parameter updates may address this limitation in future work.
Conclusion
GaussianFlow SLAM introduces a robust, fully differentiable monocular SLAM method for dense scene reconstruction, establishing dense optical flow as a geometric supervisory signal for both state estimation and map optimization. It supports efficient, closed-form kernel-level differentiation for scalability, integrates error-driven Gaussian management, and attains state-of-the-art tracking and rendering performance on public datasets. Future research may explore dynamic scene modeling and further optimization acceleration to enable broader deployment in real-time applications.