- The paper introduces a framework using Koopman autoencoders and GP regression to emulate nonlinear dynamical systems with high computational speedup.
- The paper demonstrates stable, physics-consistent predictions with relative errors below 10% for most test cases, even for unseen operating conditions.
- The paper enables real-time surrogate modeling, reducing simulation times from 170 minutes to 3 seconds for complex fluid flow scenarios.
Overview of the PISTM Framework
The paper introduces a non-intrusive Physics-Informed Spatio-Temporal Modeling (PISTM) framework to accelerate the emulation of nonlinear dynamical systems, with a specific focus on engineering design scenarios where high-fidelity multi-physics simulations are computationally expensive. The framework leverages Koopman autoencoders for encoding the underlying spatio-temporal dynamics and Gaussian process (GP) regression for rapid emulation at unseen operating conditions, enabling efficient surrogate modeling without requiring explicit knowledge of governing physical equations.
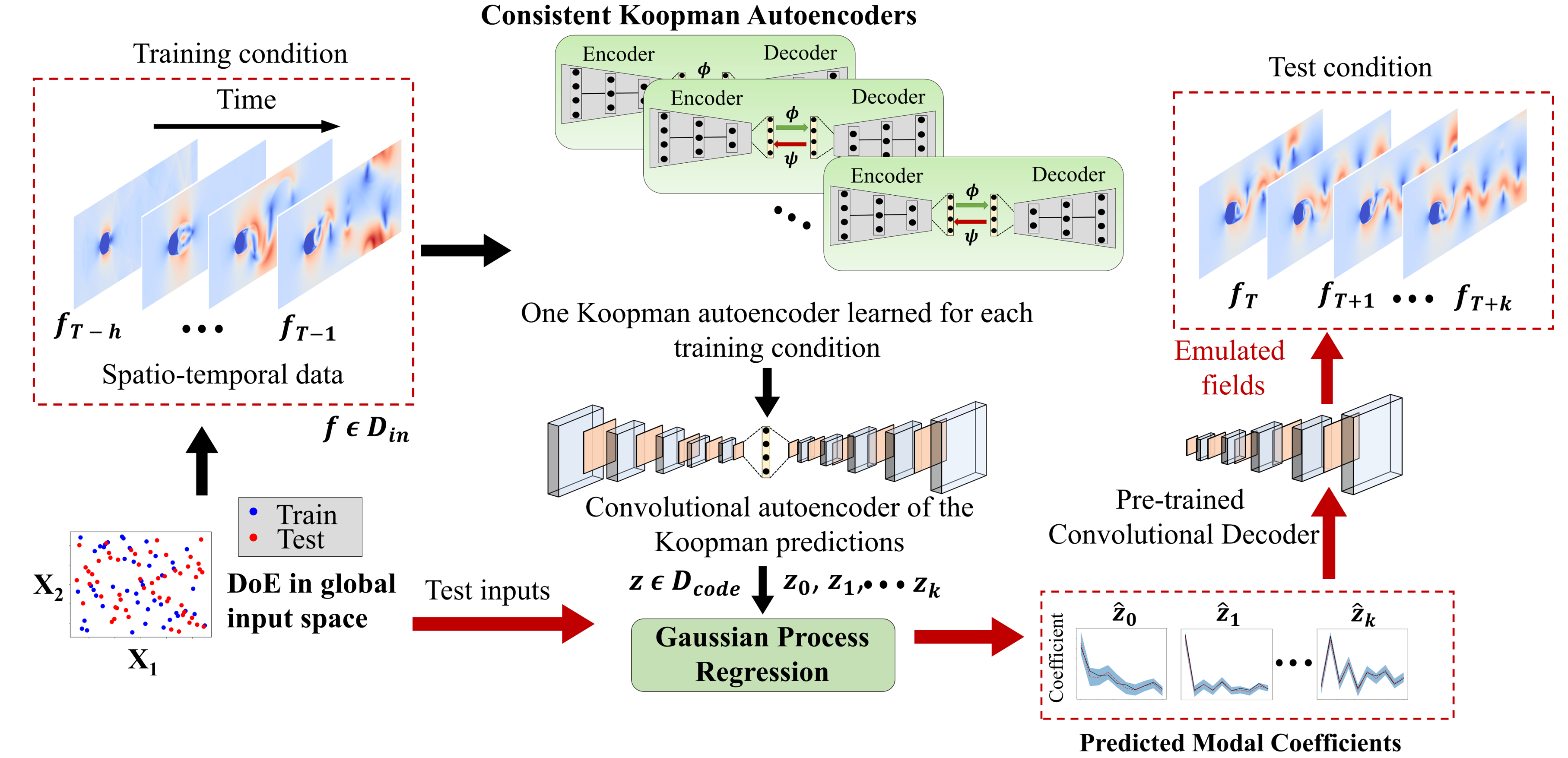
Figure 1: Schematic overview of the proposed physics-informed spatio-temporal modeling (PISTM) framework of dynamical systems.
Motivation and Positioning
Traditional deep learning architectures such as CNNs and LSTMs have been used for surrogate modeling of high-dimensional spatio-temporal fields but suffer from limited generalizability outside their training distributions due to the absence of explicit physical constraints. On the other hand, physics-informed neural networks (PINNs) enforce governing equations during training, but their dependence on explicit PDEs limits applicability when such equations are only partially or not at all known. The paper addresses this limitation by embedding physics-informed constraints through Koopman operator theory, which linearizes the evolution of nonlinear systems in a transformed latent space, thus extending generalizability to previously unseen operating and boundary conditions.
Methodological Advances
The proposed methodology consists of several distinct stages:
- Training Data Generation: Employs Latin Hypercube Sampling to select operating conditions (e.g., Reynolds numbers Re) for which high-fidelity simulations are performed to generate training datasets.
- Koopman Autoencoder Training: A distinct Koopman autoencoder is trained for each operating condition, encoding the forward and backward system dynamics and enforcing a physics-based stability constraint. Each autoencoder provides a consistent latent-space representation of the temporal evolution.
- Reduced Order Modeling (ROM): A convolutional autoencoder is trained on Koopman-generated predictions from all training conditions to yield an efficient low-dimensional latent space representation, paired with a decoder that reconstructs the full field from this code.
- Latent Space Emulation with GPs: For unseen operating conditions, a Gaussian process regression model predicts the latent coefficients of the ROM as a function of operating condition and time. GP-based interpolation is selected due to its robustness in regimes of limited training data and its capability to provide uncertainty quantification.
- Real-time Prediction: For an arbitrary new operating condition, the predicted latent codes are decoded to reconstruct the surrogate field dynamics over the desired temporal horizon, eliminating the need for expensive simulations or test-phase Koopman learning.
This approach is illustrated concisely in Figure 1.
Quantitative and Qualitative Results
The PISTM framework is validated on the canonical problem of two-dimensional incompressible viscous flow around a circular cylinder, solved with the Lattice Boltzmann Method. The task involves forecasting the velocity field for previously unseen Re values, given historical data for a different subset of Re. The evaluation metrics include three relative prediction errors: between (i) true and emulated data (εE), (ii) Koopman prediction and emulated data (εKE), and (iii) true data and Koopman prediction (εK), over prediction horizons up to 10 timesteps.
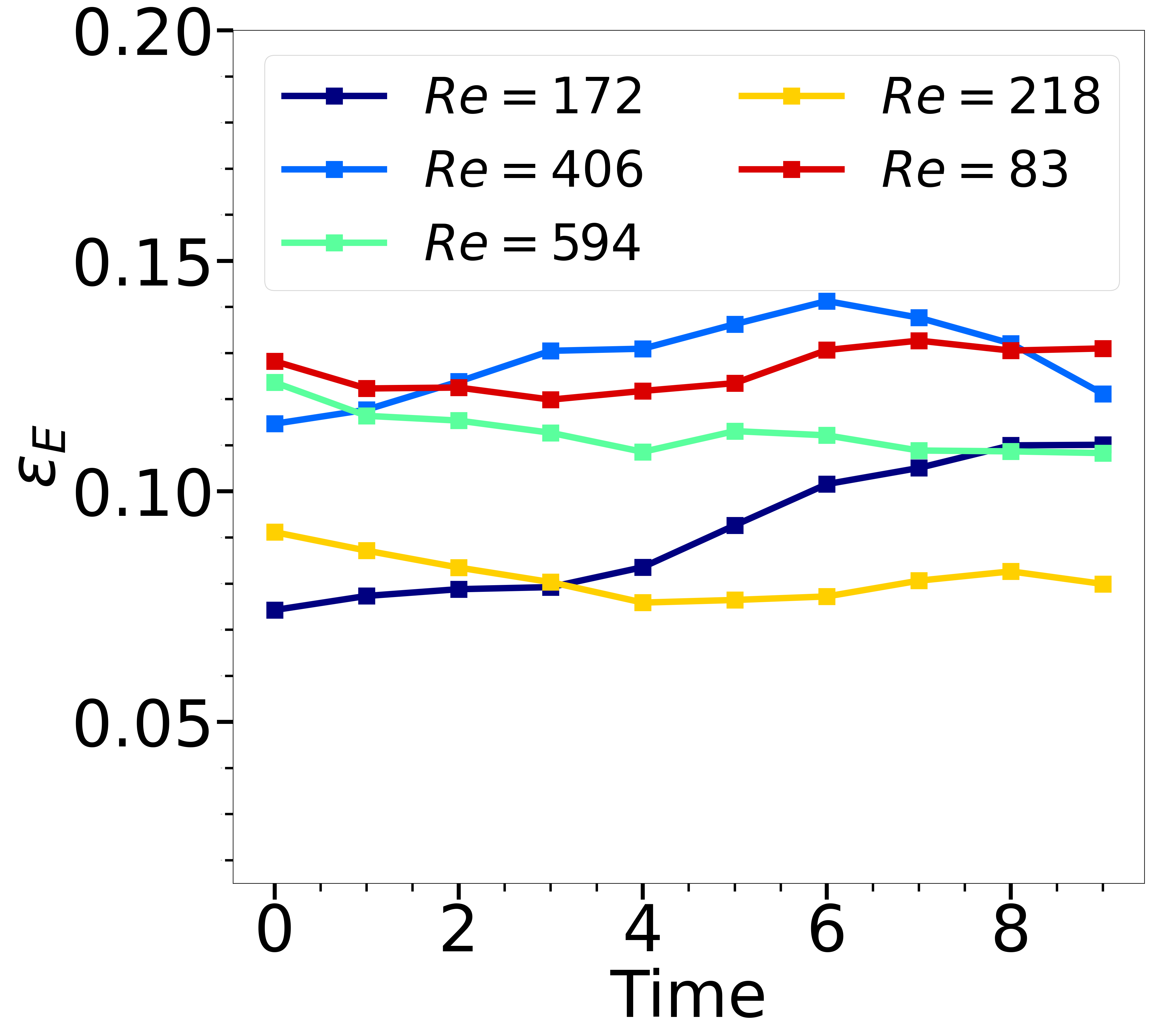
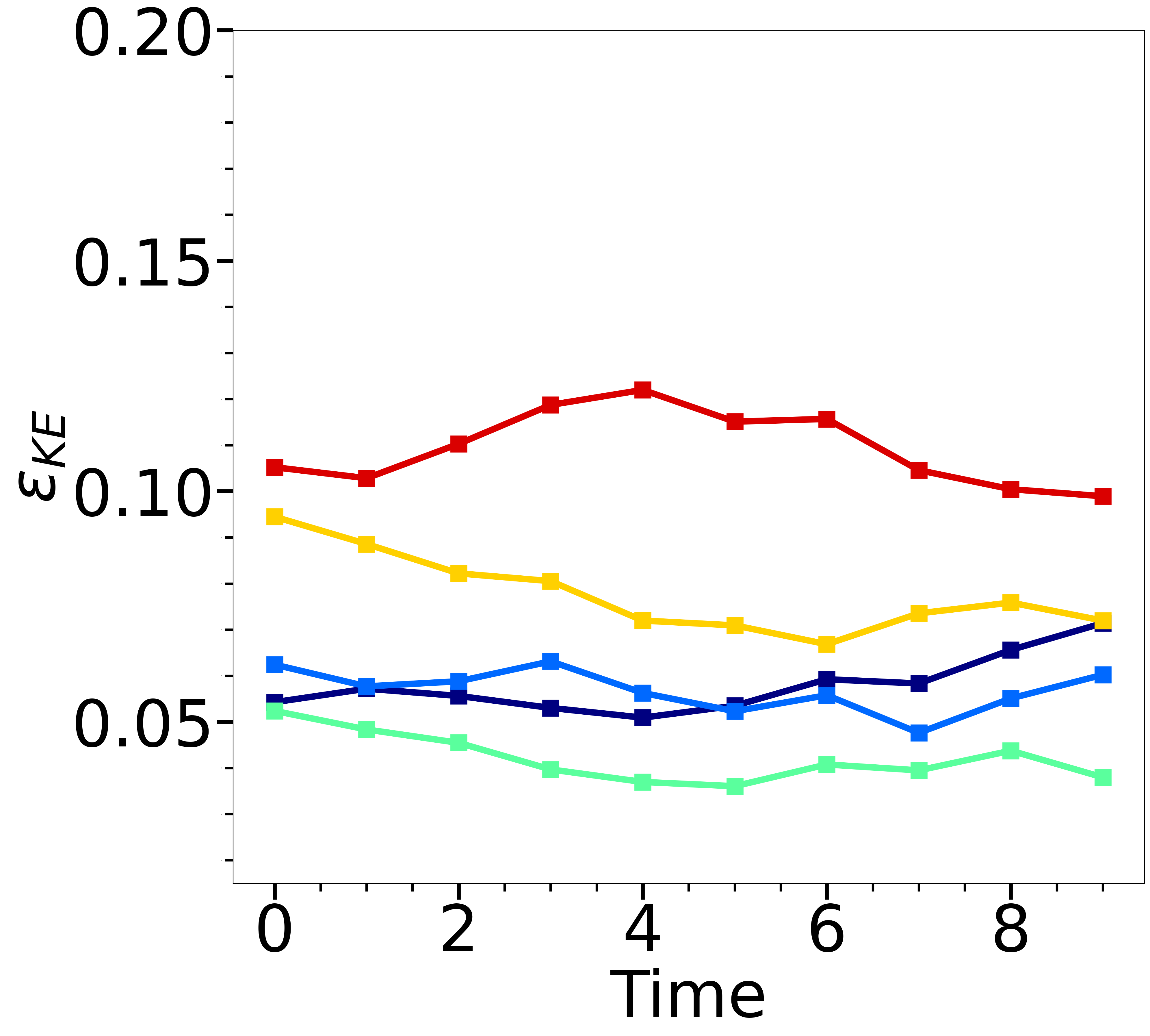
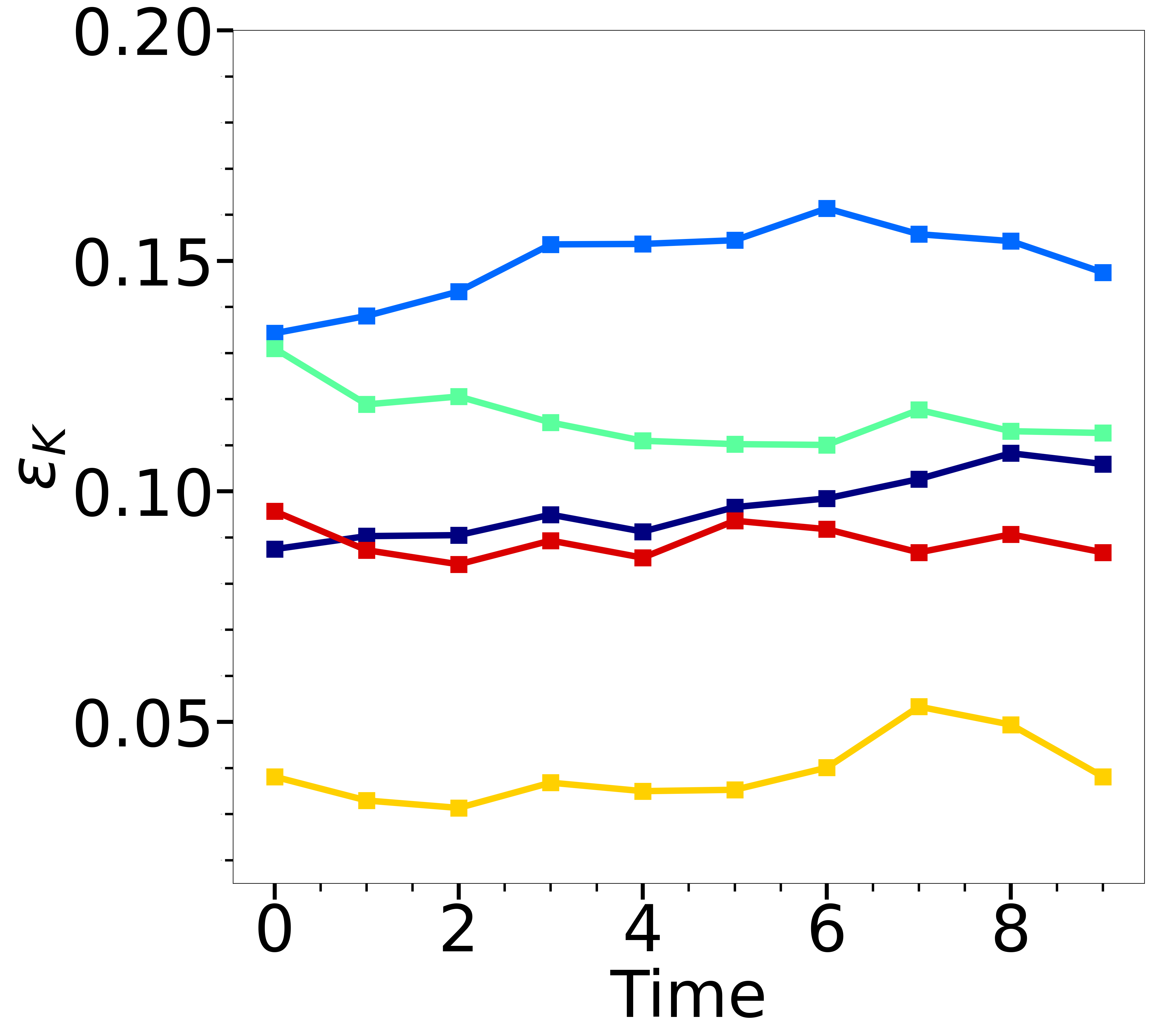
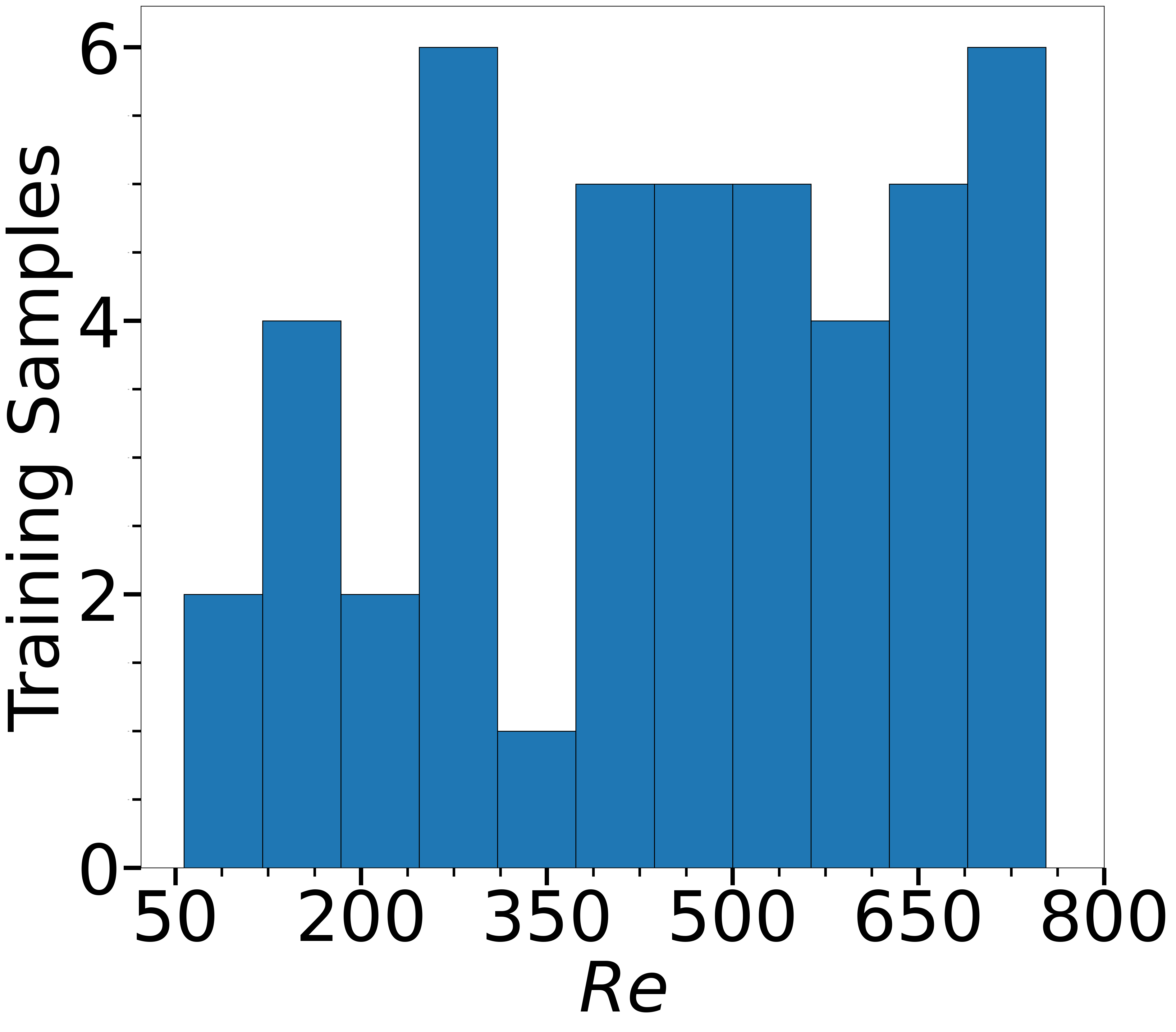
Figure 2: Comparison of εE, εKE, and εK for 5 test conditions and 45 training conditions as a function of Re.
Empirical results demonstrate that the proposed framework maintains Re0 for all test cases except one, which has sparse training coverage in its Re1 range. Importantly, the prediction errors do not diverge with time due to the physics-constrained structure of the Koopman layer, contrasting with the well-known drift encountered in physics-agnostic models.
A qualitative comparison (see Figure 3) further illustrates that the spatial distribution and magnitude of the surrogate's prediction errors are nearly indistinguishable from the errors made by Koopman predictors that were trained on the ground-truth historical data for the test condition (a scenario not available in practice for truly unseen test cases). Crucially, the entire PISTM pipeline delivers predictions Re2 times faster than full high-fidelity CFD, with a single test case evaluated in 3 seconds versus 170 minutes for a full simulation.
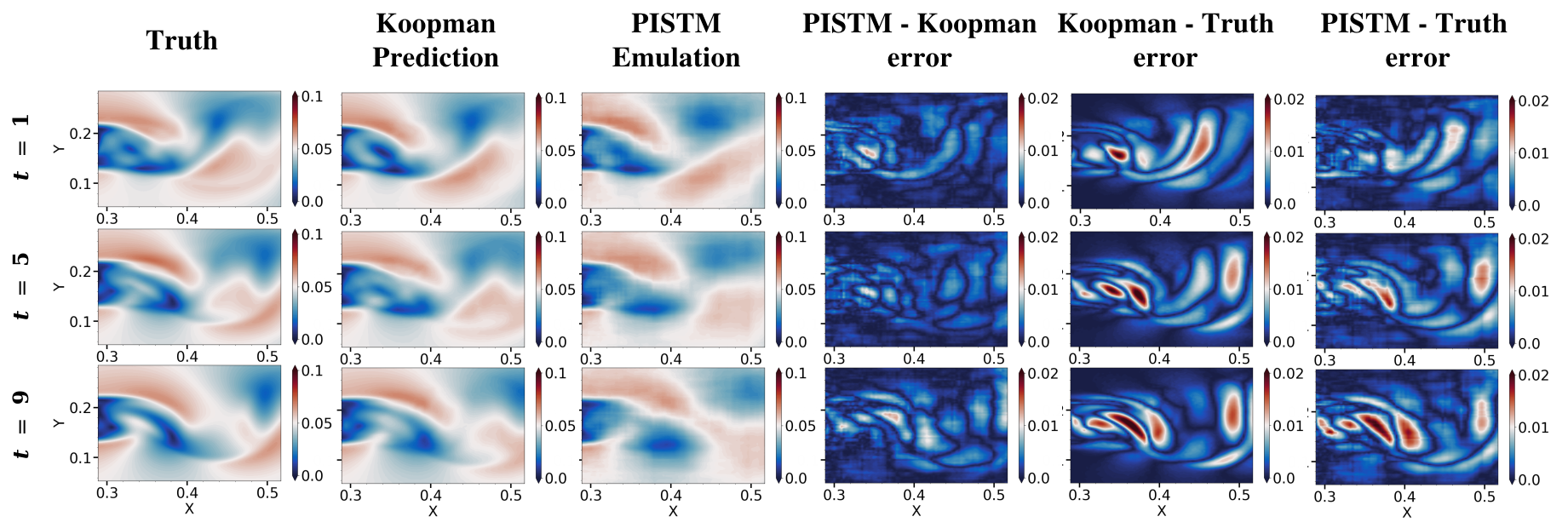
Figure 3: Qualitative comparison among true data, Koopman predictions, emulated data, and their error maps for test case Re3 at Re4.
Implications and Discussion
The non-intrusive nature of the PISTM framework represents a key practical advantage for high-value engineering contexts (e.g., design optimization, uncertainty quantification, rapid virtual prototyping), where the cost of new high-fidelity simulations at arbitrary conditions is prohibitive. By leveraging Koopman-based latent dynamics and GP surrogate modeling, the method ensures physics-consistent, time-stable extrapolation to new operational regimes. The architecture is sufficiently generic to be applicable beyond fluid flow systems, potentially extending to any nonlinear dynamical system for which only partial or implicit physical knowledge is available.
Theoretically, the fusion of Koopman operator theory and probabilistic ROM interpolation through GPs enables balancing physical consistency, data efficiency, and computational tractability. In contrast to PINNs, there is no requirement for explicit PDEs or handcrafted physical residuals; all that is necessary is access to historical field snapshots for a set of operating conditions.
The strong numerical results highlight the robust generalization capabilities, given sufficiently informative training coverage in the operating condition space. However, performance degradation is observed where the training data are sparse, indicating a need for adaptive sampling or active learning strategies to optimize training set selection in future work.
Future Directions
Extension of the framework to multi-physics and multi-scale environments, integration with adaptive DoE/active learning, or hierarchical surrogate modeling (e.g., multi-fidelity fusions) are immediate next steps. Additional prospects include uncertainty quantification for risk-averse optimization and extension to control or inverse design tasks. Incorporating richer structure in the GP emulator, such as deep kernel learning, or augmenting the Koopman autoencoders with attention mechanisms or domain decomposition strategies, could further enhance generalizability and performance across even more complex problem classes.
Conclusion
The PISTM framework utilizes Koopman autoencoders and Gaussian process regression to deliver fast, stable, and physically-consistent spatio-temporal surrogate modeling for nonlinear dynamical systems without requiring direct access to governing equations. The obtained surrogates demonstrate low generalization error on previously unseen conditions and provide significant computational speedup, offering a scalable pathway for accelerating the solution of expensive simulation-driven engineering design and analysis tasks (2604.14424).

