- The paper analytically shows that even minor horizon estimation errors can cause a quadratic increase in distance estimation errors.
- It introduces two correction methods—quadratic regression and gradient descent—to mitigate systematic errors in ground-plane mapping.
- Simulation results validate significant improvements in distance accuracy and underscore the importance of optimized calibration protocols.
Analytical Modeling and Correction of Distance Error in Homography-Based Ground-Plane Mapping
Introduction
This paper presents a formal analysis of systematic distance errors resulting from geometric miscalibration in monocular camera systems using planar homography for ground-plane mapping. The explicit analytical derivation links small perturbations in horizon estimation—with a focus on errors introduced during manual homography initialization—to an approximately quadratic growth of distance estimation error as a function of real-world range. Two lightweight correction strategies are introduced and evaluated through large-scale simulations, demonstrating their practical relevance and elucidating implications for camera calibration protocols in intelligent monitoring systems.
Theoretical Framework: Homography-Induced Error Amplification
The derivation begins by formalizing the homography-based pixel-to-ground mapping. For any fixed image column (constant u), the transformation from image row v to ground-plane Y is:
Y(v)=Offset+v−vhK
where vh is the image-space horizon. Errors in homography initialization—modeled as a horizon shift ϵ—yield perturbed estimates:
ΔY≈(Kϵ)Y2
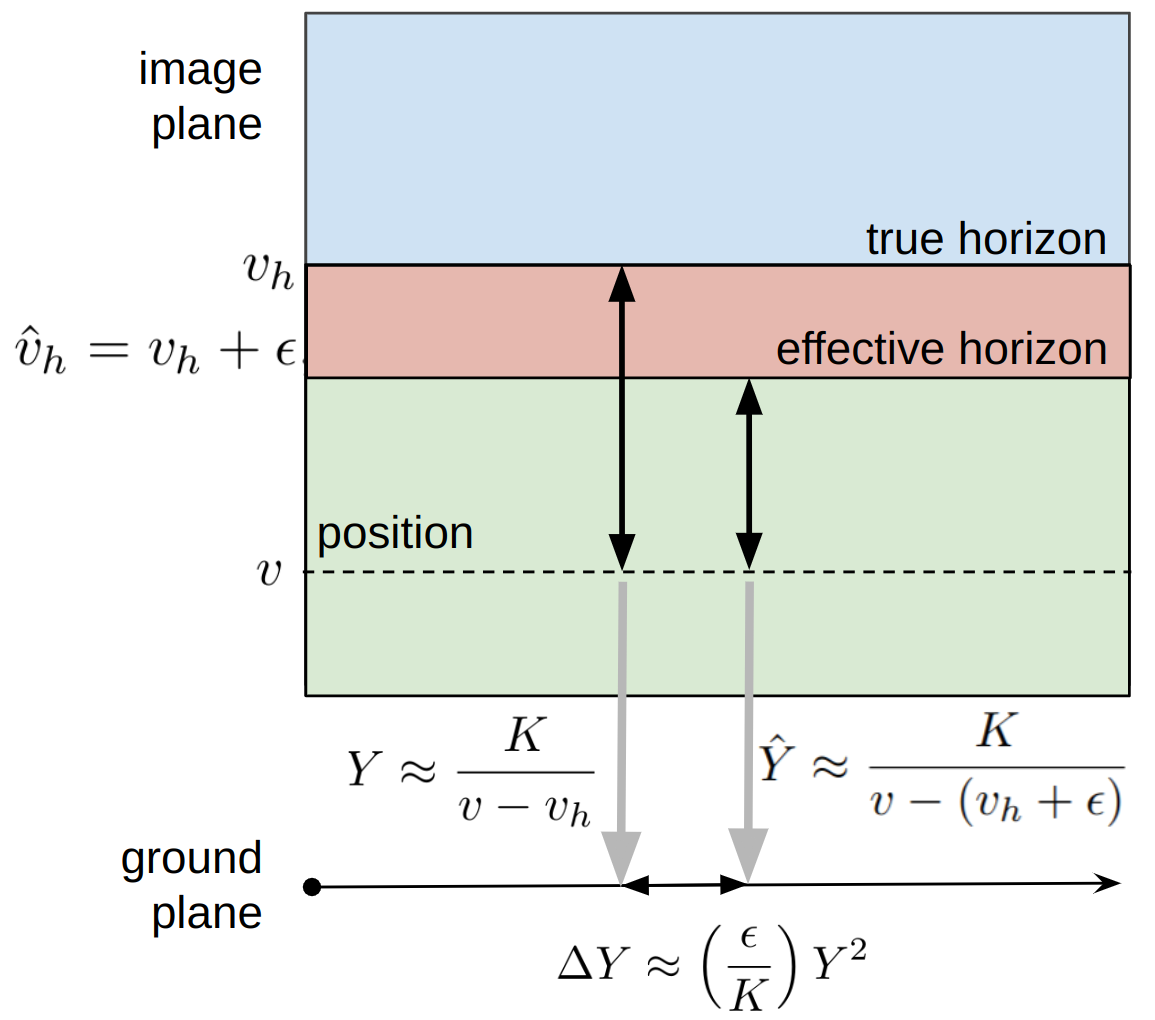
Figure 1: Minimal geometry of homography-based depth mapping; a perturbation in effective horizon position (vh) alters the denominator, leading to a quadratic increase in distance error with range.
This result, which emerges directly from projective geometry, quantifies the range-dependent error amplification and reveals that even sub-pixel initialization errors can cause significant distortion at long range. The dominant error source is therefore not algorithmic (e.g., detector variance or modeling error), but geometric, driven by homography configuration.
Correction Methodologies
Two model-agnostic correction strategies are evaluated, each compatible with black-box detection and tracking pipelines:
1. Quadratic Regression Correction:
The error distribution is estimated as a quadratic function of ground-plane distance using three calibration measurements:
e(d)=ad2+bd
where coefficients (a,b) are solved via least squares on sparse calibration data. The correction is applied along the camera-object vector direction, directly compensating for the modeled error at every mapped detection.
2. Trapezoid Vertex Optimization (Gradient Descent):
The pixel coordinates of the base-plane trapezoid are treated as optimization variables. Using the same calibration pairs, the mean absolute error is minimized by coordinate-wise perturbation of trapezoid vertices with constraints on vertex displacement to avoid degenerate solutions. This method seeks the optimal homography fit with respect to sparse calibration data, providing robustness to non-ideal initializations.
Simulation Design and Evaluation Protocol
Extensive simulations are performed with Unreal Engine, using an ideal pinhole camera and perfectly planar ground geometry to isolate homography-induced effects. Each scene includes 1,000 randomly perturbed trapezoid maps to model realistic calibration accuracy, and over 19 million test samples are used for path-level evaluation. Only three calibration points are available in each trial (reflecting typical field practice), and systematic analysis of calibration point placement is performed.
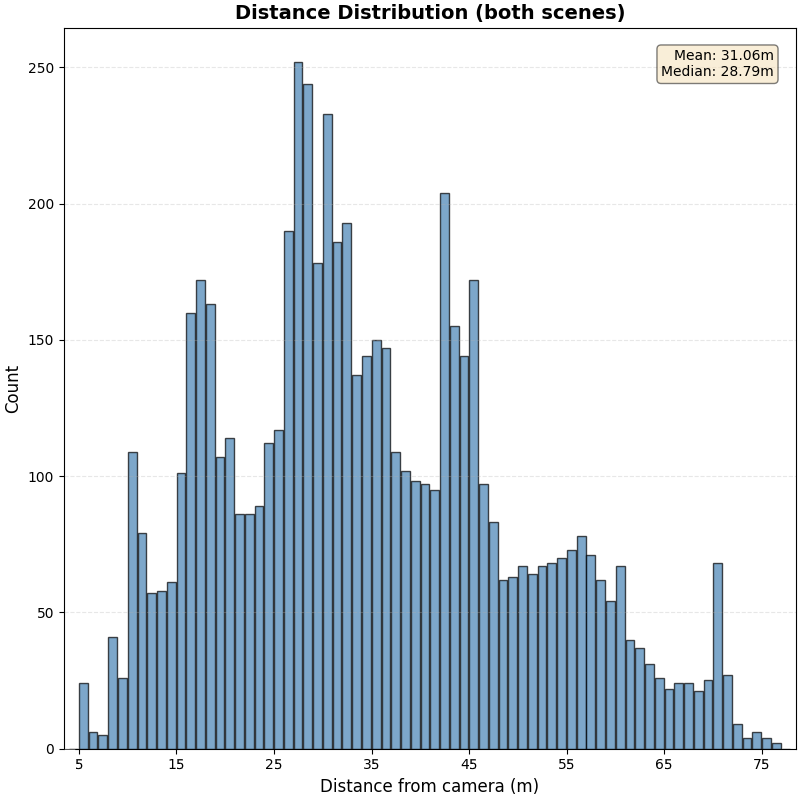
Figure 2: Empirical distribution of object distances for simulated pedestrian traffic; defines the system's effective operating range.
Non-uniform calibration error across the range is noted, with the risk of overfitting when correction is only validated on the three calibration points (Figure 3).
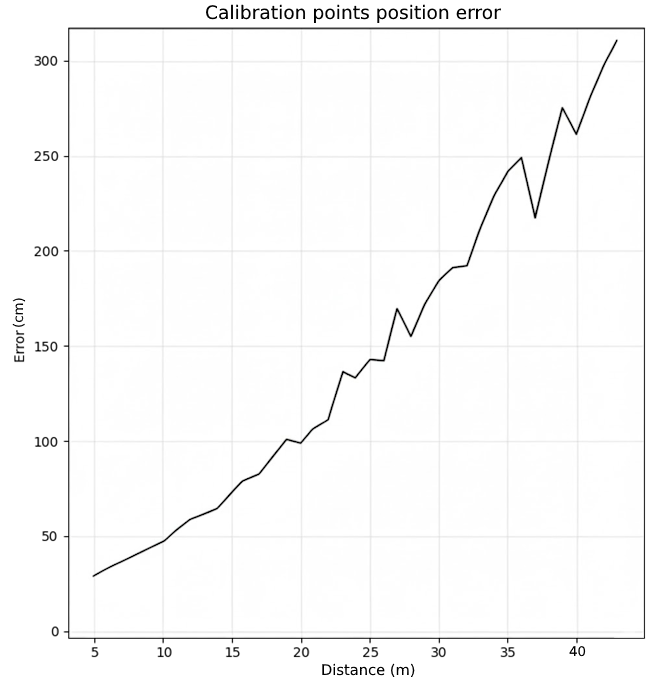
Figure 3: Example of calibration error varying with distance, illustrating inconsistent fits from over-constrained correction on sparse points.
Experimental Results
Both correction approaches yield substantial error reduction, but their operational profiles differ:
- Regression-Based Correction: Higher peak and median improvements; susceptible to catastrophic overfitting if the quadratic model is misestimated.
- Gradient Descent: Guaranteed non-negative correction on calibration points and far fewer severe failures; slightly lower median performance but stronger worst-case robustness.
Aggregate results:
| Metric |
Regression |
Gradient Descent |
| Positive path improvement |
93.0% |
98.8% |
| Positive calibration success |
96.5% |
100.0% |
| Mean path improvement |
73.9% |
76.5% |
| Median path improvement |
90.0% |
86.1% |
| Extreme negative tail risk |
higher |
lower |
Regression's calibration and path improvement are highly correlated (v0), while GD reveals a weaker correspondence (v1), reflecting its greater path-level robustness. Both methods require careful selection of calibration samples; points should be well-distributed over the target operating range to maximize correction validity. Calibration points too close to the camera or clustered result in poor parameter identification and increased overfitting risk.
Implications and Future Work
The analytical characterization of distance error exposes the fundamental geometric sensitivity of monocular ground-plane mapping. This implies that many observed performance deficits in real-world camera-based measurement systems are best addressed by improving geometric calibration rather than by adding complexity to detection or learning models. The presented corrections can be rapidly deployed, require only sparse calibration, and involve no extra sensors—making them attractive for large-scale monitoring systems.
Practically, a hybridized approach is justified: use regression if calibration improvement exceeds 75%; otherwise, deploy gradient descent for robust correction.
Theoretically, the results call for the design of calibration protocols that optimize point placement to maximize coverage of the quadratic error growth regime. Future developments are expected in the integration of lens/intrinsic uncertainties, online calibration update methods, and extensions to multi-camera/multi-plane scenarios. Automated selection of calibration points and minimal sensors to robustly estimate the dominant error manifold are also promising directions.
Conclusion
The paper systematically formalizes the quadratic error law in planar homography-based monocular distance estimation, provides efficient correction mechanisms, and highlights the operational consequences for surveillance, traffic, and industrial vision systems. This framework is lightweight, interpretable, and readily adopted with existing pipelines—demonstrating that post hoc geometric calibration substantially improves distance estimation accuracy, outperforming more sophisticated black-box regression schemes and underscoring the primary value of accurate geometric initialization in vision-based analytics.
References
For complete technical details and results, refer to "Analytical Modeling and Correction of Distance Error in Homography-Based Ground-Plane Mapping" (2604.10805).