- The paper presents a novel MHE framework that integrates an adaptive robust loss function to effectively mitigate the impact of measurement outliers in nonlinear dynamic systems.
- It employs an online dual estimation scheme that alternates between optimizing state trajectories and updating loss function parameters, ensuring convergence and improved performance.
- Experimental results demonstrate significant mean squared error reduction and robust state tracking, highlighting practical applicability in autonomous and industrial systems.
Outlier-Robust Nonlinear Moving Horizon Estimation with Adaptive Loss Functions
Introduction
This paper addresses the challenge of state estimation in nonlinear systems affected by measurement outliers, proposing a novel moving horizon estimation (MHE) framework that incorporates an adaptive robust loss function as the stage cost. The contribution is motivated by the limitations of Kalman Filter (KF) variants and standard MHE in scenarios with heavy-tailed, heterogeneous, or non-Gaussian measurement noise distributions, where sporadic outliers can severely degrade estimation performance. By integrating an adaptive loss function with online-updated shape-controlling parameters, the framework aims to prioritize uncontaminated data and automatically adjust robustness according to the observed measurement residuals.
The key theoretical advancement centers on utilizing the square of the derivative of Barron's general adaptive robust loss function with respect to its argument as the estimator's penalty metric. This loss, parameterized by α∈(1,2), offers a tunable trade-off between sensitivity to inliers and suppression of outliers, while overcoming the unbounded domain and discontinuity issues of the original Barron loss. Specifically, the loss function
φ(r,α,c)=c21(cr)2(1+∣α−2∣1(cr)2)α−2
is continuous, differentiable, and belongs to the class of K∞ functions, which is critical for proving stability and convergence properties in MHE schemes. The regularization term on α penalizes excessive deviation from quadratic behavior, enforcing an implicit bias towards L2 inliers.
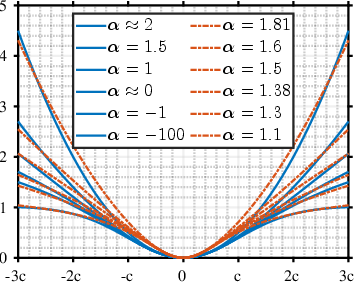
Figure 1: Visualization of the adaptive robust loss ρ(r,α,c) and its derivative φ(r,α,c), highlighting the effect of varying α on robustness against outliers.
Outlier-Robust MHE Architecture
The estimator is formulated as a constrained optimization problem that simultaneously solves for the optimal state trajectory, process disturbances, and shape parameters for the adaptive loss, over a moving estimation window. The adaptive mechanism allows either a shared αk for all measurements in the window (homogeneous robustness) or individualized parameters αi,j per measurement, enabling fine-grained control in the presence of temporally or spatially clustered outliers.
With the individualized φ(r,α,c)=c21(cr)2(1+∣α−2∣1(cr)2)α−20, the MHE can accommodate heterogeneous contamination patterns, at the cost of increasing the dimensionality of the estimation problem and potential overfitting under sparse data. The optimization is separated into a dual estimation scheme, alternating between solving for states with fixed shape parameters and updating shape parameters given residuals, guaranteeing cost non-increasing sequences that converge within a predefined tolerance.
Stability Analysis
Robust asymptotic stability (RAS) of the proposed estimator is established under conventional MHE assumptions: system detectability, continuity, and boundedness of stage and arrival costs. The bounded, smooth nature of the adaptive loss and its regularization ensures that the estimator variables remain proportional to their true counterparts, and performance guarantees analogous to classical φ(r,α,c)=c21(cr)2(1+∣α−2∣1(cr)2)α−21-based MHE are retained.
Experimental Results
Performance is evaluated using a simulated path-following task for a tractor-trailer system, with GNSS measurements contaminated by randomly injected outliers. Two noise scenarios are investigated: Gaussian and uniform distributed noise, with varying outlier probabilities and amplitudes. The adaptive robust MHE is compared to:
- An MHE with fixed φ(r,α,c)=c21(cr)2(1+∣α−2∣1(cr)2)α−22
- An MHE with grid search over φ(r,α,c)=c21(cr)2(1+∣α−2∣1(cr)2)α−23
- The previous method from the authors with no adaptation
Strong numerical results demonstrate that the adaptive robust estimator achieves significant reduction in mean squared estimation error compared to the fixed loss schemes, especially in the presence of outliers, but at the cost of increased computational load. The iterative adaptive mechanism rapidly converges, typically requiring no more than three iterations per sample, after which further error reduction is negligible.
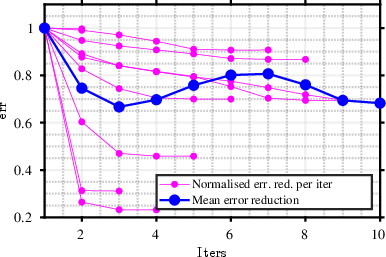
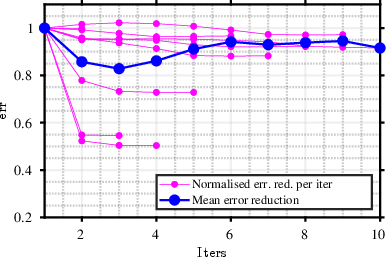
Figure 2: Mean normalized estimation error reduction per adaptation iteration, illustrating that most performance gains are achieved in the first several iterations for both Gaussian and uniform noise.
Furthermore, the estimated state trajectories closely track the true system under heavy contamination, with the largest deviations observed only during severe outlier occurrences.
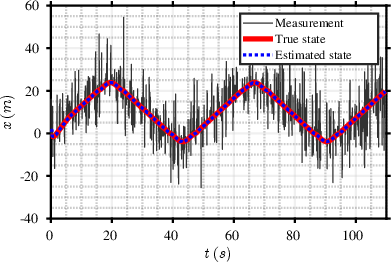
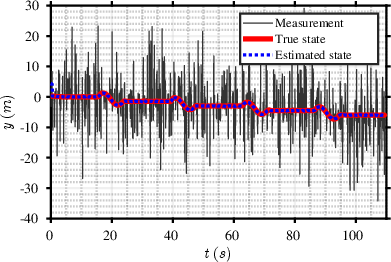
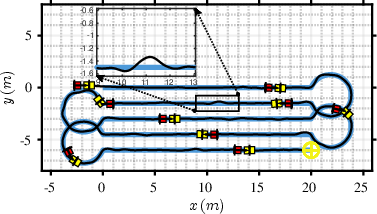
Figure 3: Overlay of measured, true, and estimated tractor φ(r,α,c)=c21(cr)2(1+∣α−2∣1(cr)2)α−24 and φ(r,α,c)=c21(cr)2(1+∣α−2∣1(cr)2)α−25 coordinates, as well as the trajectory for a single experimental trial, indicating effective outlier mitigation.
A summary of comparatives between estimators over 1000 trials indicates that the proposed adaptive method yields the lowest estimation errors, particularly for state variables crucial for path following, at a moderate computational increase relative to simpler schemes.
Implications and Future Directions
Theoretical implications include the demonstration that state-of-the-art MHE can be extended to robust, adaptive penalty functions that generalize classical robust statistics within a principled, optimization-based framework. The modular architecture allows for extensions to more general nonlinear systems, higher degrees of measurement heterogeneity, and dynamic adaptation schedule design (e.g., Bayesian or model-based updates of φ(r,α,c)=c21(cr)2(1+∣α−2∣1(cr)2)α−26).
Practically, the approach enables real-time estimation in adverse environments without assuming a priori outlier distributions or contamination rates, making it suitable for applications such as autonomous vehicles, industrial robotics, and navigation systems exposed to intermittent sensor faults.
Future work should focus on algorithmic improvements to reduce computational complexity, such as joint variable elimination or efficient proximal updates, to fully enable deployment in embedded or high-rate systems. The observed empirical evolution of the learned φ(r,α,c)=c21(cr)2(1+∣α−2∣1(cr)2)α−27 can be leveraged for dynamic noise diagnostics or adaptive sensor fault detection.
Conclusion
The paper provides a rigorous framework for outlier-robust moving horizon estimation via adaptive loss functions, offering enhanced resilience to measurement anomalies without sacrificing estimator stability or tractability. By unifying robust statistics and nonlinear state estimation with an online, shape-adaptive loss, the method advances the state-of-the-art in robust observer design and opens new avenues for theory and application in robust control and fault-tolerant estimation.