- The paper introduces a Bayesian framework that uses Gaussian Processes to learn unknown Hamiltonian structures in distributed port-Hamiltonian systems.
- The paper adapts GP regression with a physics-informed kernel to construct virtual passive outputs that circumvent the dissipation obstacle in control design.
- The paper validates the approach on nonlinear shallow water equations, demonstrating probabilistic guarantees of closed-loop energy boundedness despite model uncertainty.
Data-Driven Boundary Control for Distributed Port-Hamiltonian Systems
Introduction and Theoretical Foundations
This paper presents a unified Bayesian framework for boundary control of distributed port-Hamiltonian systems (dPHS) governed by PDEs with partially unknown dynamics (2604.04266). Traditional dPHS methods efficiently model a wide class of physical systems by emphasizing energy-based interconnections and boundary interactions, facilitating robust and systematic control design. However, these approaches critically depend on the availability of accurate Hamiltonian functionals, which are often partially or entirely unknown in practice due to complex, nonlinear, or unstructured physical phenomena.
To address this identification bottleneck, the authors leverage recent advances in data-driven modeling with Gaussian Processes (GPs) for physical systems, leading to the GP-dPHS model class. The GP-dPHS framework provides a Bayesian mechanism for learning the unknown Hamiltonian structure directly from spatio-temporal data, simultaneously quantifying model uncertainty. The combination of GP-dPHS with passivity-based boundary control by interconnection enables a control architecture that (1) admits probabilistic guarantees of closed-loop robustness under model mismatch and (2) circumvents the classical dissipation obstacle inherent to energy-shaping controllers for distributed dissipative systems.
The methodology is instantiated and validated on the nonlinear shallow water equations, providing an illustrative test case for data-driven boundary control of PDE-governed physical systems.
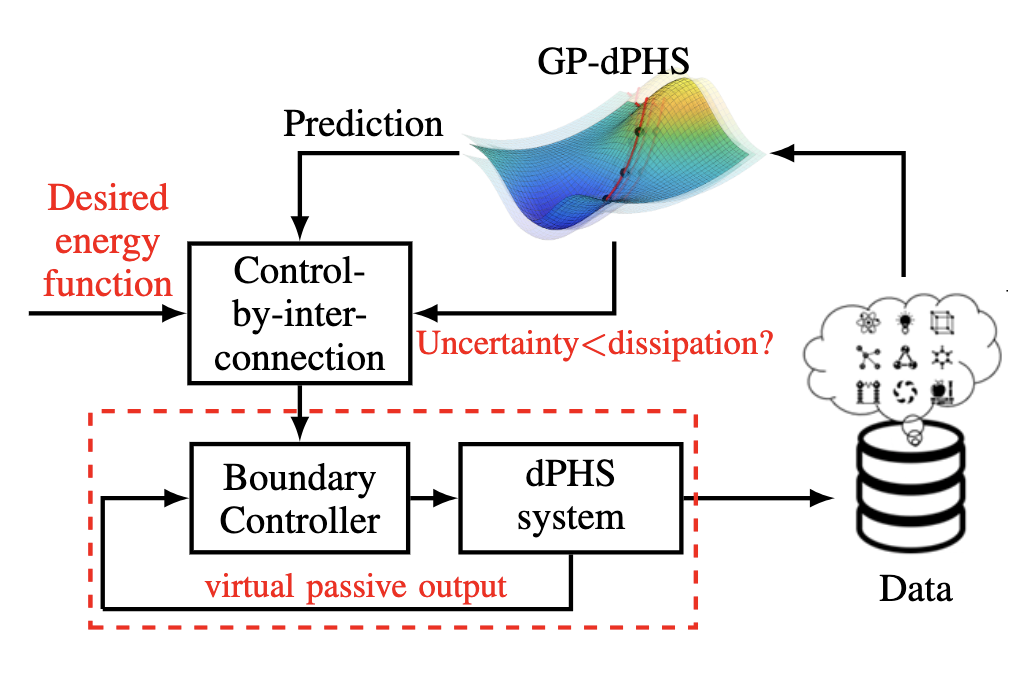
Figure 1: Overview of the proposed data-driven boundary control loop. State trajectories are measured from the PDE system for GP-dPHS model training, and the resulting controller is synthesized via control by interconnection using the learned Hamiltonian.
Gaussian Process Distributed Port-Hamiltonian Model Learning
The authors introduce a principled data collection procedure, wherein spatially and temporally sampled system state trajectories, together with boundary actuation signals, constitute the training set. Classical GP regression is adapted to the infinite-dimensional dPHS setting by constructing a physics-informed kernel, kdphs, encoding the structural properties of port-Hamiltonian PDEs. This kernel integrates the spatial operator structure (P1∂z∂+(P0−G0)) and is evaluated on a finite-dimensional surrogate induced by spatial discretization.
The training process estimates the finite-dimensional surrogate Hamiltonian's GP posterior mean, μ(H^∣E), which is then used as the basis for subsequent control design. Notably, GP regression’s invariance under linear transformations is critical in aligning the data structure with the port-Hamiltonian formalism, enabling direct learning of the variational (co-energy) derivatives necessary for control law synthesis.
Control by Interconnection and Overcoming the Dissipation Obstacle
The closed-loop architecture is constructed via power-preserving interconnection of the physical plant and a finite-dimensional port-Hamiltonian controller, following established Casimir-based energy-shaping principles. However, applying traditional boundary control by interconnection (e.g., via Casimir generation) to distributed (infinite-dimensional) systems is impeded by the dissipation obstacle: standard passive outputs limit the achievable set points when internal dissipation (e.g., friction, turbulence) is present.
To resolve this, the authors construct, following the approach of [macchelli2015control], a new class of virtual passive outputs that enable the controller to shape the Hamiltonian functional along the dissipative directions. The construction is rigorous, with structural invariance results ensuring that Casimir functions computed via the learned model remain valid for the true system due to the shared interconnection topology.
The feedback law utilizes the GP-dPHS posterior mean for controller synthesis. Robustness with respect to model mismatch is explicitly handled by incorporating posterior uncertainty into an energy-based analysis. The main theoretical result gives a probabilistic ultimate boundedness guarantee: if the model error is bounded with high probability (as quantified using the GP variance), then the closed-loop trajectories remain ultimately bounded in a sublevel set of the closed-loop energy with probability at least $1-p$.
Empirical Evaluation: Shallow Water Equations
The methodology is evaluated on the nonlinear shallow water system in a channel, which admits a distributed port-Hamiltonian representation with significant internal dissipation. The true Hamiltonian incorporates an unknown nonlinear term, which is excluded from the model used for controller synthesis and hence represents model misspecification.
A GP with a squared exponential kernel (and prior mean set to the quadratic terms of the Hamiltonian) is trained on sparse samples. The closed-loop controller is designed using the learned Hamiltonian surrogate. Key technical features include the construction of explicit Casimir invariants that do not require knowledge of the underlying (unknown) true Hamiltonian. The controller leverages the modified passive output to guarantee practical stabilization despite internal dissipation and model uncertainty.
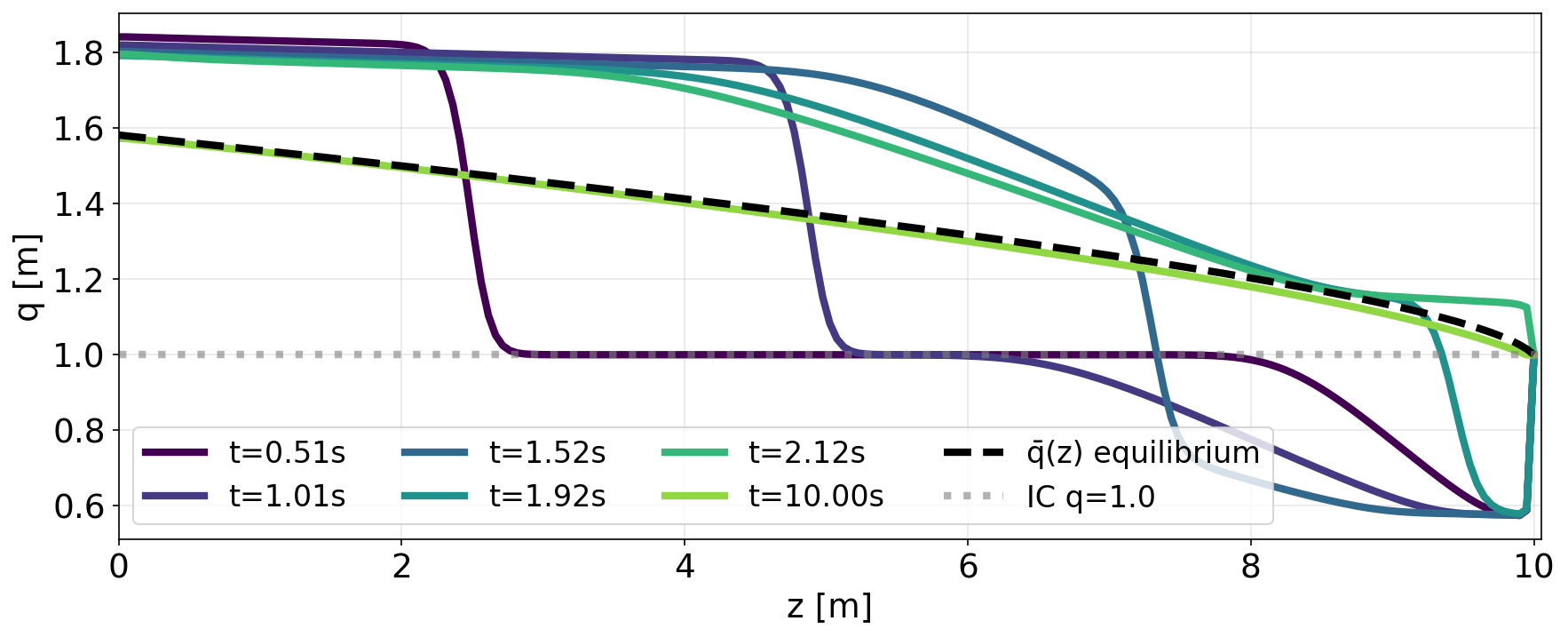
Figure 2: Water height profiles in the shallow water channel. The boundary controller ensures convergence from initial condition (gray) to the desired profile (black) using the GP-dPHS-based synthesis.
The energy evolution plots reveal that, due to model mismatch, the closed-loop Hamiltonian may oscillate or temporarily increase during transients, but remains ultimately bounded as predicted by the robustness analysis. In the hypothetical perfect-model case, the closed-loop energy decreases monotonically, illustrating the essential impact of model uncertainty.
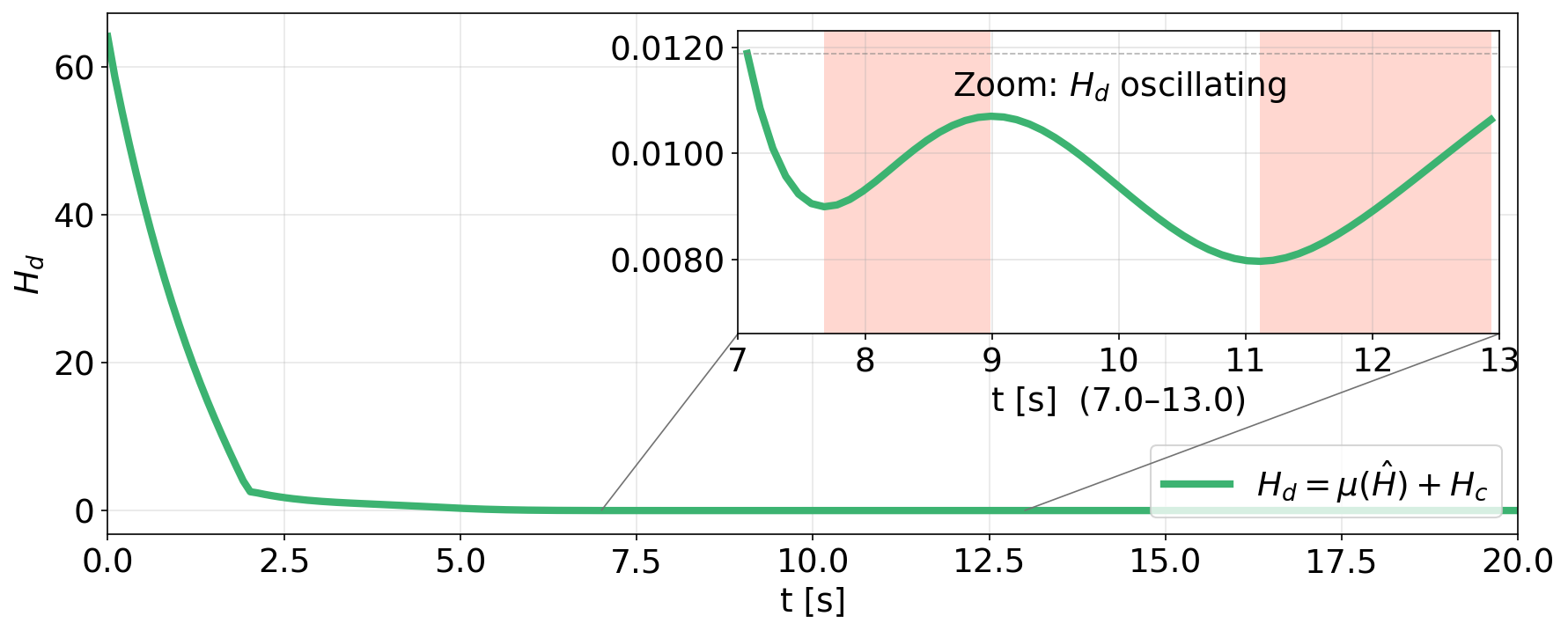
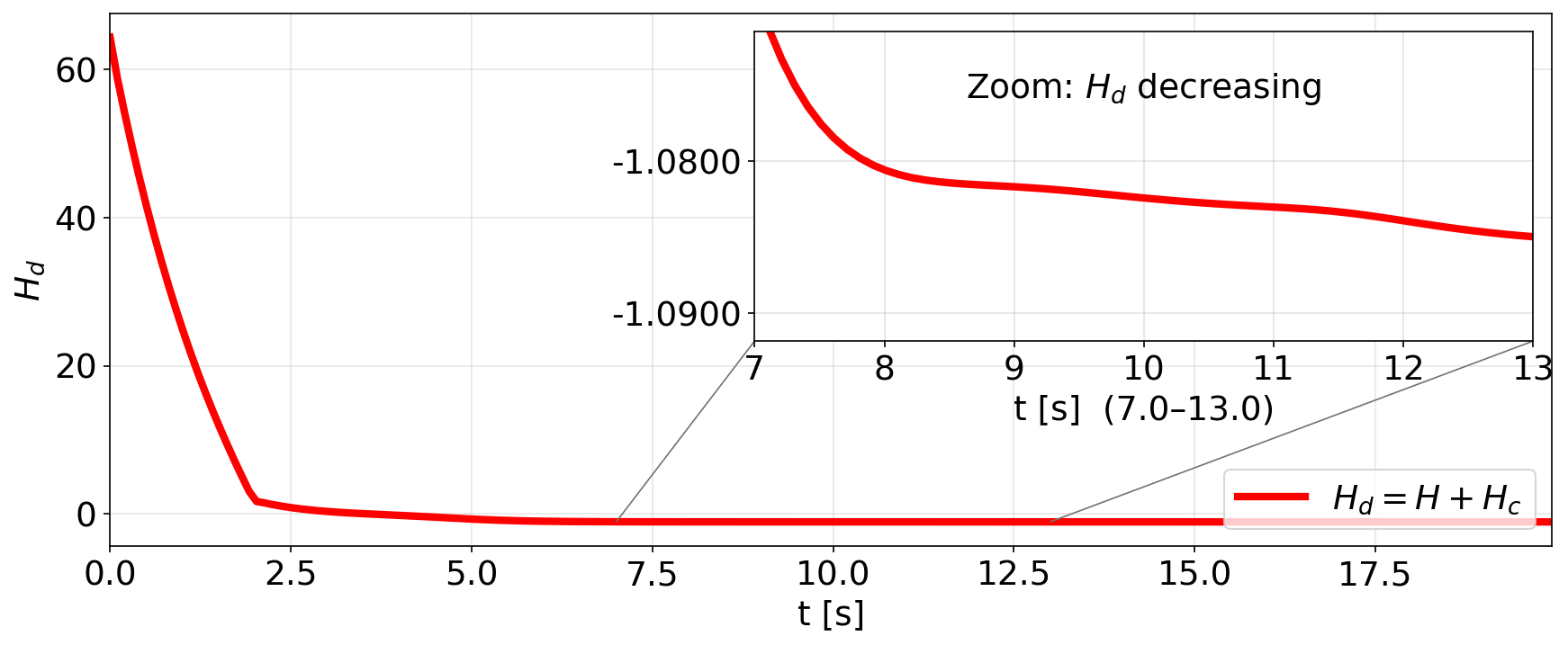
Figure 3: (a) Controller using learned Hamiltonian: the closed-loop energy converges to a bounded set due to model error; (b) controller using true Hamiltonian: monotonic energy decrease.
Implications and Future Work
This work demonstrates how combining Bayesian nonparametric regression (GPs) with structure-preserving control theory (port-Hamiltonian systems and boundary control by interconnection) enables the deployment of robust control strategies for PDE-governed physical systems in the presence of epistemic uncertainty. The explicit integration of uncertainty information within the control design—rather than simply using point estimates—yields formal probabilistic guarantees on closed-loop safety, with immediate utility for real-world applications where model completeness cannot be assumed.
From a theoretical perspective, the framework bridges infinite-dimensional control, probabilistic learning, and energy-based robustness analysis. The Casimir-based approach enables the construction of invariant quantities essential for systematic energy shaping, even in the presence of unmodeled dissipative effects.
This approach has significant implications for AI-driven model-based controllers in complex or under-modelled physical settings, such as fluid dynamics, soft robotics, and large-scale energy systems. Future research should address scalability to higher-dimensional spatial domains, extension to multiphysics systems, and incorporation of online learning/allocation of measurement effort for improved model fidelity in safety-critical regimes.
Conclusion
The presented framework for data-driven boundary control of distributed port-Hamiltonian systems effectively combines physics-informed GP learning with passivity-based control design. The use of virtual passive outputs to circumvent the dissipation obstacle, coupled with a probabilistic robustness analysis, yields strong guarantees on closed-loop performance and safety in the presence of model uncertainty. Its application to the shallow water equations showcases control performance and illustrates the theoretical principles in practice. The integration of Bayesian inference with structure-preserving control theory represents a significant advancement in the control of PDE-governed physical systems with unknown or partially known dynamics.