- The paper proposes a framework unifying rigidity and Laplacian methods by modeling formations as simplicial complexes and minimizing a deformation energy.
- It derives distributed control laws using discrete deformation gradients that remain invariant under translation, rotation, scaling, and affine transformations.
- Simulation results in 2D and 3D validate that the element-based controllers offer robust, isotropic, and uniformly convergent formation stabilization.
Introduction and Motivation
The paper "Element-based Formation Control: a Unified Perspective from Continuum Mechanics" (2604.04027) develops a comprehensive framework for distributed multi-agent formation control by leveraging the discrete deformation gradient from continuum mechanics. Whereas traditional methodologies are fundamentally bifurcated into rigidity-based controllers—operating on sparse edge constraints—and Laplacian-based controllers—using global graph-theoretic operators—the proposed approach elevates multidimensional simplicial elements (e.g., triangles or tetrahedra) to the primary abstraction for formation modeling. This enables formation control strategies to be systematically derived as energy minimization over local deformation tensors, yielding control laws that are invariant under translation, rotation, scaling, and affine transformation, depending on the choice of the distortion energy.
Framework and Theoretical Derivation
By associating each formation with a simplicial complex, the framework defines the local interaction via discrete d-simplices rather than pairwise edges. Each formation element e is characterized by a deformation gradient Fe, mapping the reference configuration to the current. The global control objective is encoded as minimizing a generalized potential
V(p)=∑e∈EweΨ(Fe),
where Ψ(⋅) is instantiated to enforce the desired invariances.
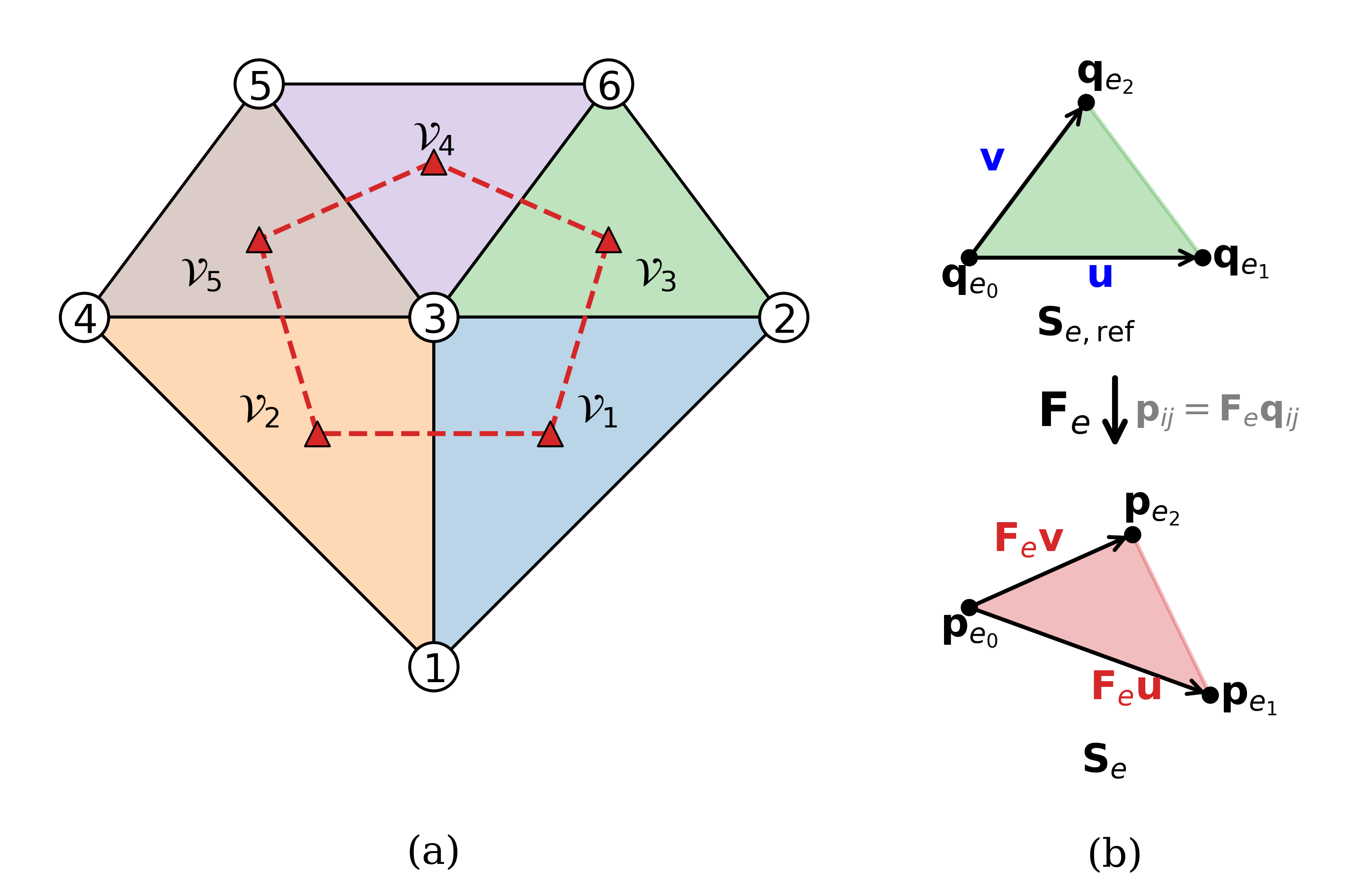
Figure 1: (a) A multi-agent formation as a simplicial complex, capturing agents, the communication graph, and element tiling. (b) The deformation gradient mapping reference to current configuration.
Crucially, for each choice of Ψ(F)—from translation-invariant (∥F−I∥F2) to similarity-invariant (∥F−sR∥F2)—the gradient flow in state space yields distributed element-based control laws. These laws are expressed as
ui=−∇piV(p),
and are shown to be distributed: each agent requires only measurements from its element neighbors.
A key contribution is the rigorous proof that the global convergence of the controlled system is determined entirely by the structure of the dual graph—the simplicial tiling connectivity. It is shown that upon energy minimization (V(p)→0), the agents achieve the target formation up to the group of admissible invariances.
Connection to Rigidity- and Laplacian-Based Methods
The framework bridges the conceptual gap between classical approaches by revealing that:
- Rigidity-based controllers are mathematically equivalent to enforcing the vanishing of particular sparse projections of the deformation energy tensor. For example, distance-based rigidity is subsumed as constraining the Green-Lagrange strain, while bearing rigidity is shown as a projection of the deviatoric part.
- Laplacian-based controllers are recovered by specializing e0 to the Dirichlet energy (e1). In this regime, the global control law coincides with minimizing a quadratic form defined by a geometry-induced Laplacian assembled from the element tiling. This reveals the existence of a hidden continuum-theoretic structure underpinning kernel-based formation stabilization.
Properties and Features
The element-based potential design grants several advantageous theoretical properties:
- Centroid invariance: The formation centroid is invariant throughout the evolution, as the control inputs strictly constitute internal forces.
- Coordinate-free implementation: For rotation- and similarity-invariant energies, the distributed controllers are implementable purely from local, body-fixed frames, even without a global reference, due to the isotropy of the stress tensor and the equivariance of the energy.
- Uniformity of convergence: Minimizing the full deformation gradient delivers well-conditioned and isotropic transient convergence, as opposed to rigidity-based methods, which can induce poorly coordinated multi-rate dynamics in ill-conditioned geometries.
Numerical Validation
Comprehensive simulation results corroborate the theoretical analysis. In 2D (N=6) and 3D (N=7) scenarios, the proposed controllers reliably organize agents into prescribed geometric formations under various invariance conditions. The controllers exhibit strong, monotonic convergence of the global energy, confirmed via log-energy traces.
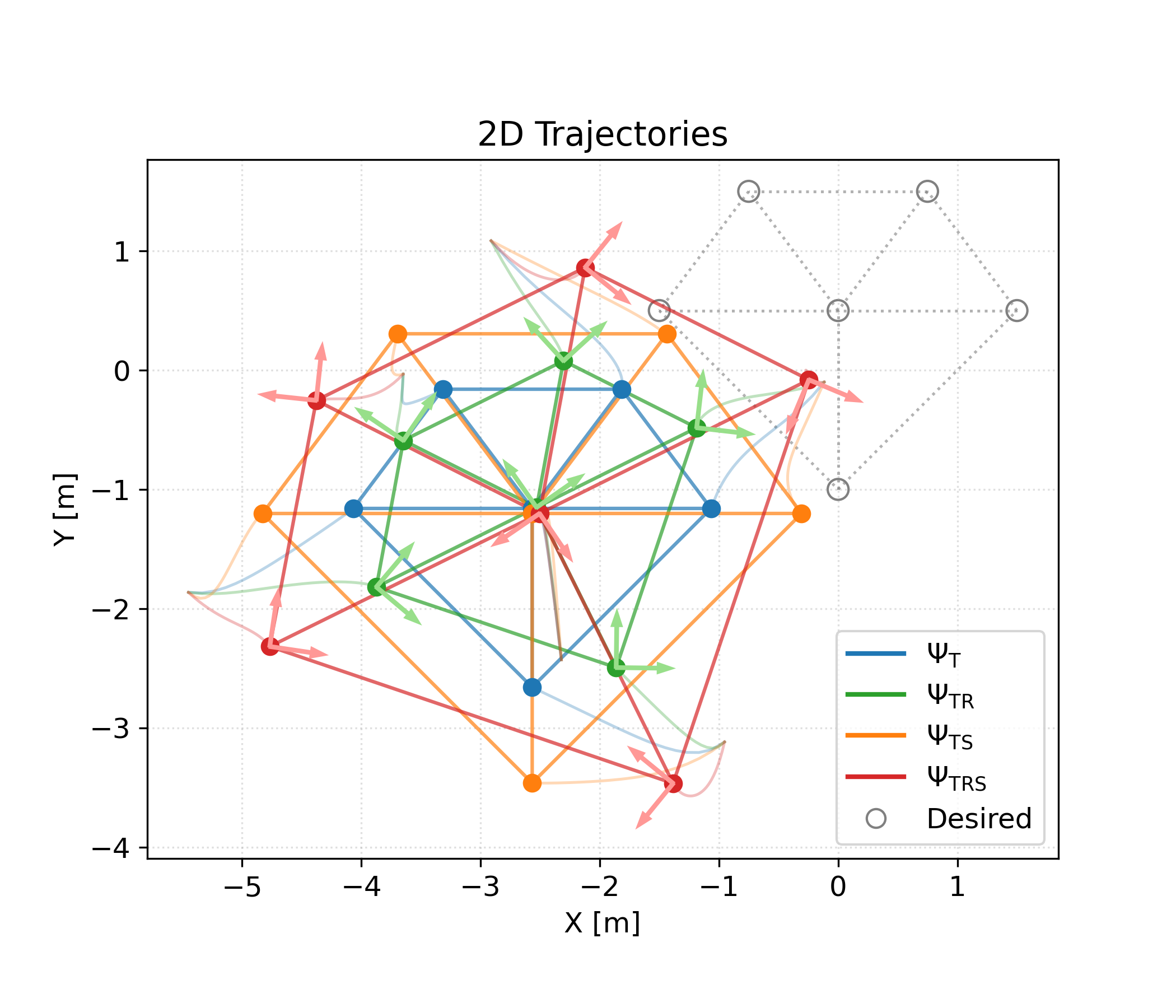
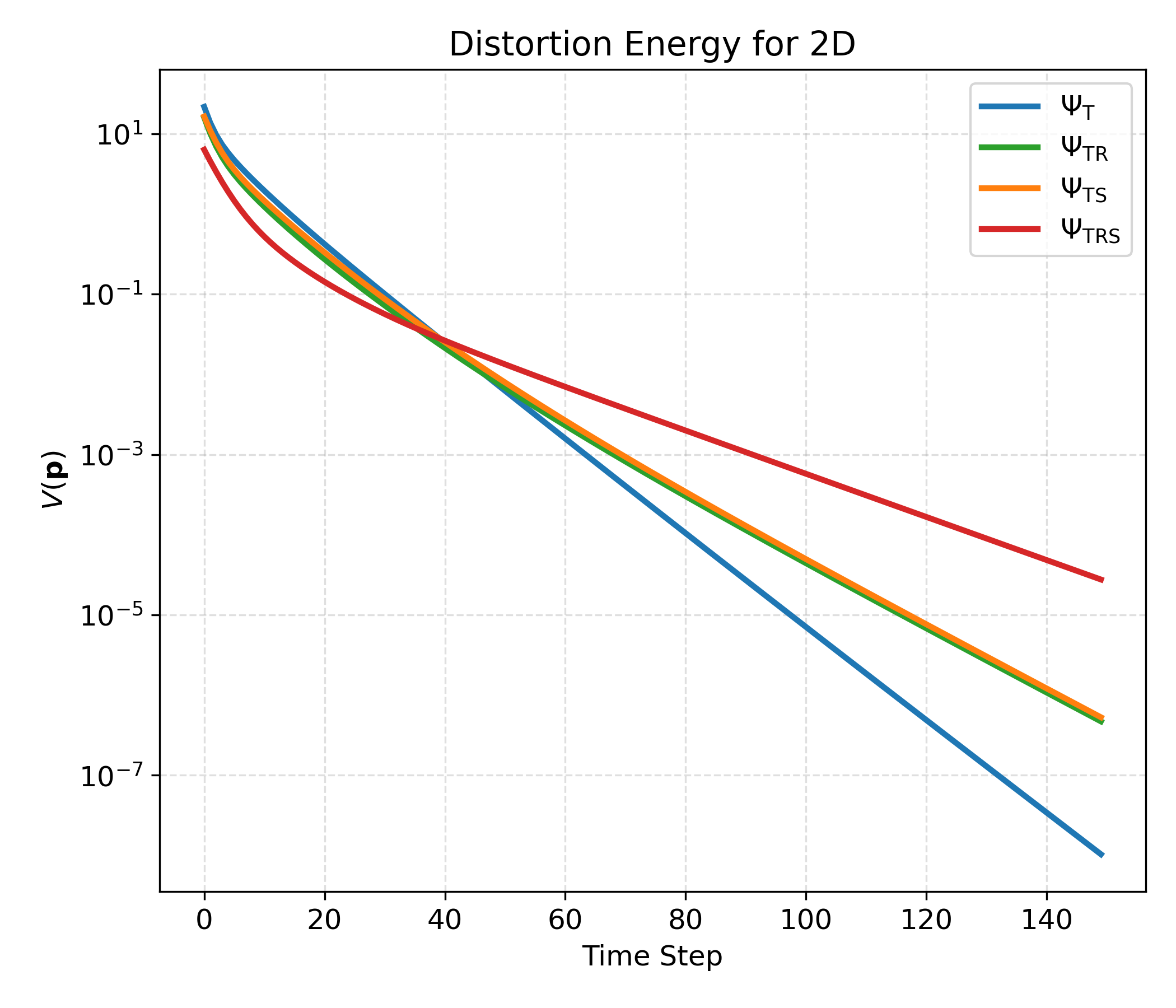
Figure 2: (a) Agent trajectories for 2D formation control show rapid convergence under all invariance regimes. (b) The energy evolution exhibits exponential decay.
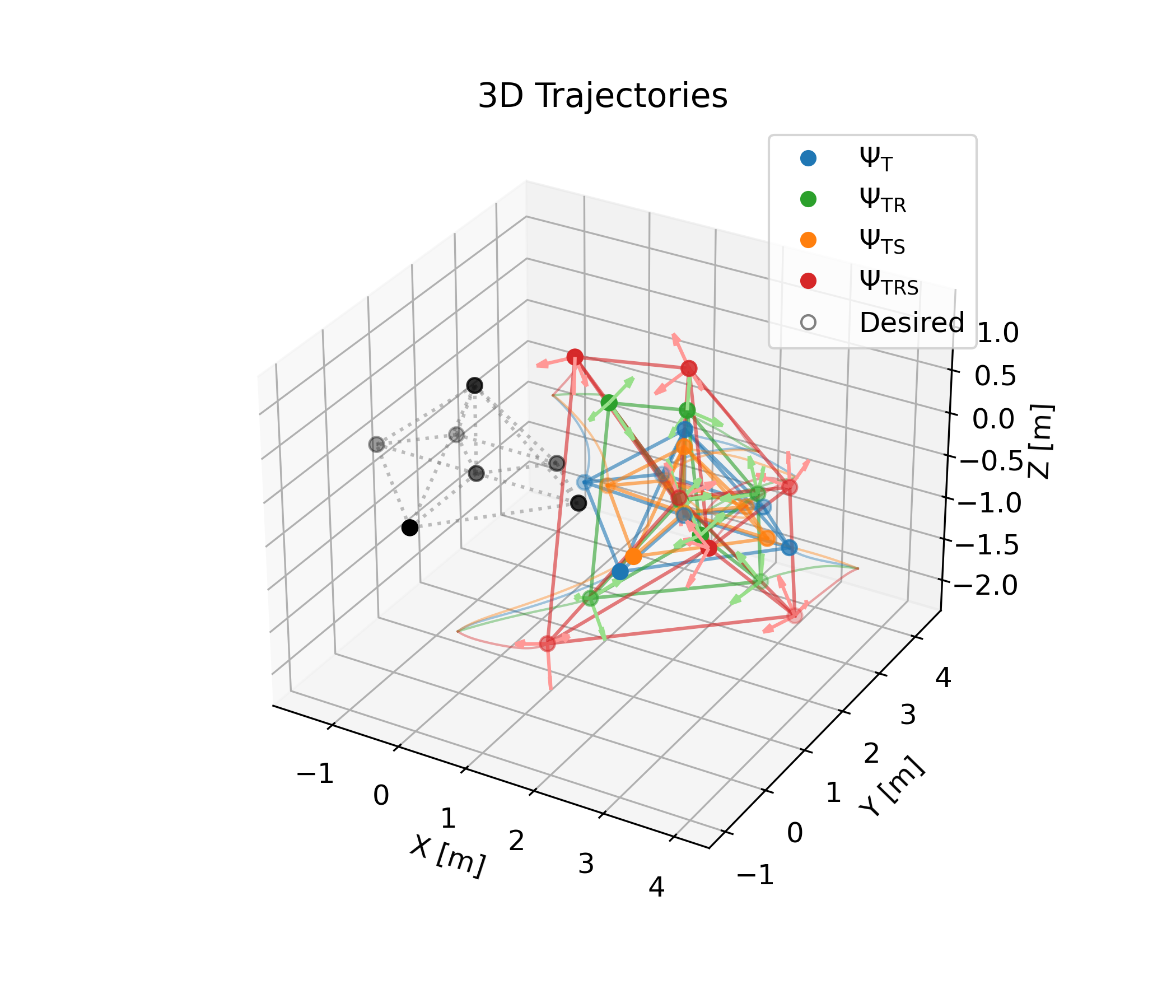
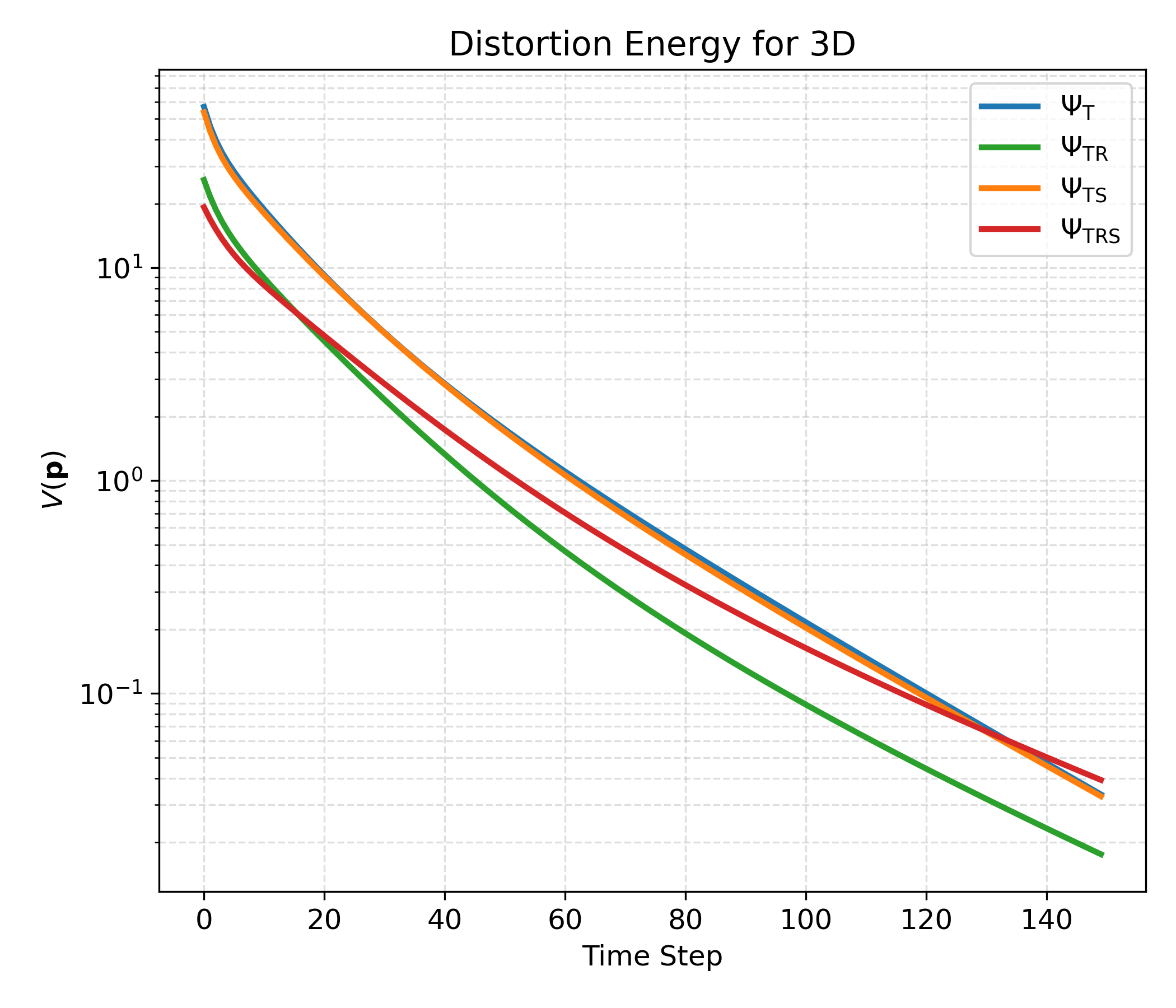
Figure 3: (a) In 3D, the agents robustly achieve a heart-shaped structure, verifying extension to higher dimensions. (b) The energy demonstrates fast convergence.
A critical test of the framework's homogeneity is presented via a systematic assessment of the sensitivity of convergence rates (coefficient of variation, CoV) under substantial geometric perturbations. Compared with rigidity-based controllers, the element-based methods show uniform performance irrespective of reference shape perturbations.
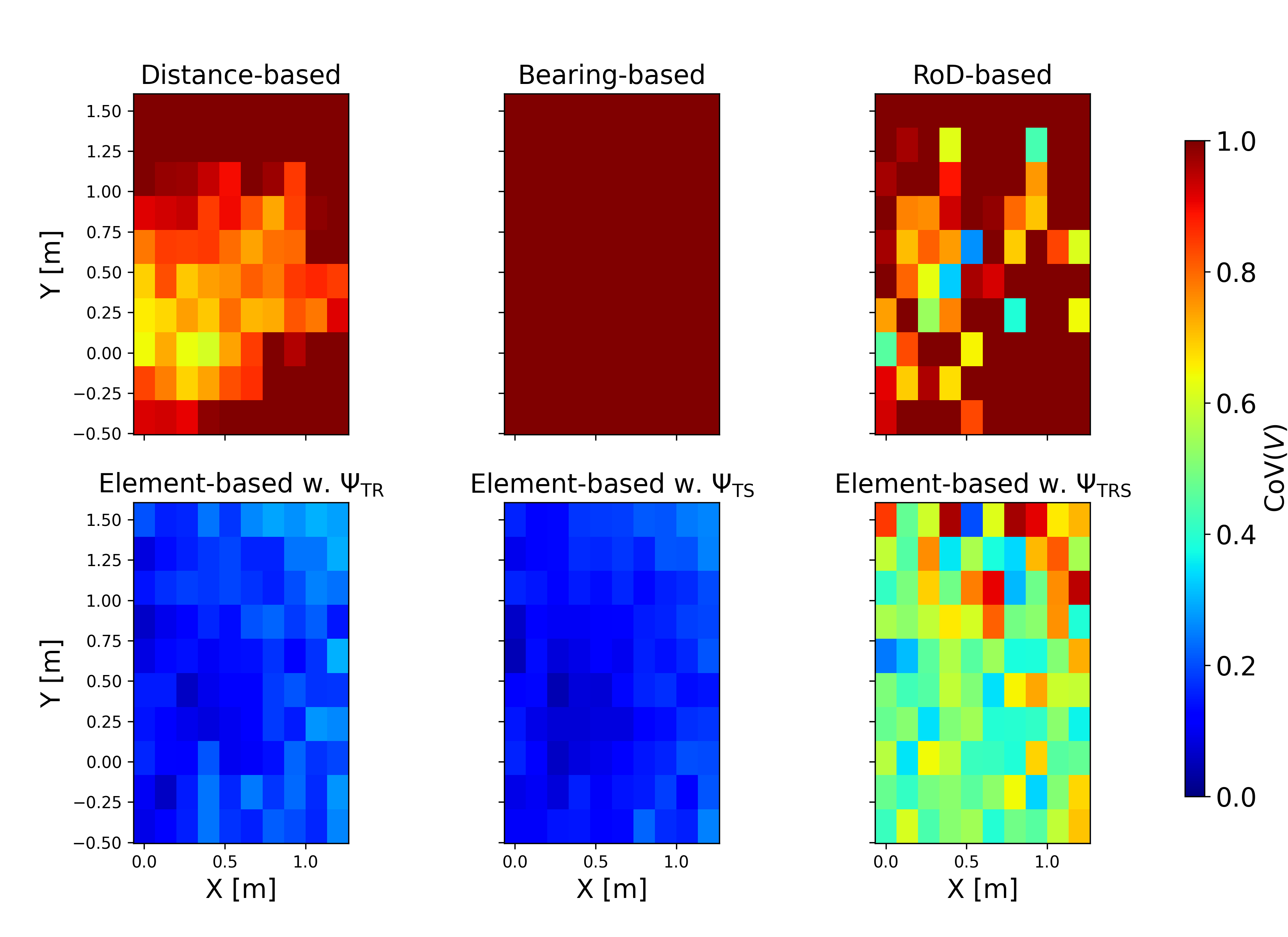
Figure 4: Heatmap of the CoV of log-energy slopes; element-based controllers maintain low variability even under severe distortions, in contrast to rigidity-based baselines.
Practical and Theoretical Implications
The unified framework reinterprets multi-agent formation control as a distributed physical simulation over a discrete elastic network, parameterized by the choice of element-wise energy. This holistic tensorial approach enables:
- Architectures for reconfigurable formations with intrinsic robustness to global shape variations and local measurement perturbations.
- Implicit suppression of degenerate modes, improved isotropy, and mitigation of multi-rate instability seen in classic sparse rigidity control.
- A direct and extensible route to controllers enforcing complex shape invariances, adaptable to viscoelastic, plastic, or time-varying material laws.
- Seamless extension to leader-follower schemes by coupling to global “external” (field) energies.
Future Outlook
Several open research frontiers emerge:
- Flexible material models: Integrate hyperelastic, viscoelastic, or plastic energy densities for adaptable or damage-tolerant formations.
- Scalability and compositionality: Investigate performance for large-scale networks and heterogeneous (hybrid-dimensional) tilings.
- Algorithmic optimization: Variable element weighting via semidefinite programming to guarantee desired boundary behaviors or performance trade-offs.
- Hierarchy and multi-layer composition: Design multi-scale architectures where distinct formation subgroups possess specific material-like behaviors.
Conclusion
This work substantiates a continuum mechanics-centric theory for distributed formation control, demonstrating that element-based energy minimization both generalizes and unifies classical control paradigms. By rooting formation error in the deformation gradient tensor, the approach enables systematic, distributed enforcement of geometric invariances and robust convergence guarantees, opening new avenues for swarms-as-materials and programmable multi-agent ensembles.