- The paper proposes a complex-valued GNN architecture that enforces local basis invariance to maintain rotational equivariance in distributed planar control.
- The model employs complex-valued operations for SO(2)-equivariant message passing, enabling effective decentralized control without relying on a global reference frame.
- Extensive experiments on decentralized flocking tasks show that the basis-invariant GNN outperforms real-valued baselines by maintaining low velocity variance and coherent swarm behavior in challenging scenarios.
Complex-Valued Graph Neural Networks for Basis-Invariant Planar Swarm Control
Introduction and Motivation
Distributed multi-agent systems require control policies that generalize across heterogeneous agent frames, particularly in GPS- or compass-denied environments. Traditionally, GNN-based controllers aggregate geometric information encoded in compatible bases for message passing. However, most learned controllers implicitly or explicitly rely on a shared global reference frame, limiting robustness and generalization. The paper "Complex-Valued GNNs for Distributed Basis-Invariant Control of Planar Systems" (2604.02615) addresses this challenge by introducing a GNN architecture that is analytically invariant to permutations of local bases for planar agents.
The authors present a complex-valued parameterization of GNN layers, leveraging the natural representation of planar rotations (SO(2)) in C. This construction ensures that both the inter-agent message passing and the nonlinear transformations within the network strictly respect rotational symmetries. The resulting controllers rely exclusively on local geometric observations, encoded in each agent’s body frame, and are provably equivariant in local space and invariant in any fixed global frame.
Theoretical Framework
To guarantee invariance to local basis selection, the paper formalizes the requirement that any GNN-based distributed controller Θ should satisfy Θ(δ▹G)=δ▹Θ(G), where δ is the vector of arbitrary SO(2) rotations of local body frames. The message passing, aggregation, and update functions of the network must independently be equivariant to SO(2) to maintain this global invariance.
The core contribution is casting 2D geometric features and the full GNN latent space as Cn, enabling all rotations to be implemented by complex scalar multiplication. Linear transformations in the latent space (i.e., learned weights) commute with these rotations, ensuring pointwise equivariance without imposing complex constraints on the parameter matrices, as would be required with real-valued encodings.
SO(2)-Equivariant GNN Layer Design
The architecture is built as a complex-valued analog of the GraphSAGE layer. Incoming messages are rotated into the receiver’s frame via multiplication with e−jθeij, where C0 is the orientation difference between sender and receiver. Aggregation is performed by taking the mean, ensuring linear and thus equivariant behavior.
The update phase uses a complex-valued linear transformation without bias, avoiding any basis-specific shift in latent space. Nonlinear expressivity is introduced with a split phase-amplitude activation: a C1 nonlinearity is applied to the amplitude and a learnable phase bias multiplies each feature, yielding a strictly C2-equivariant nonlinearity.
Empirical Results
The efficacy of the proposed basis-invariant GNN is tested on a decentralized flocking task. The architecture is trained via DAGGER imitation learning to mimic a nominal, globally-informed controller, using only local information and body-frame geometric features as input.
The basis-invariant GNN achieves strong performance in tracking the nominal controller, with velocity variance evolution and final alignment matching the closed-form controller even for the smallest networks tested.
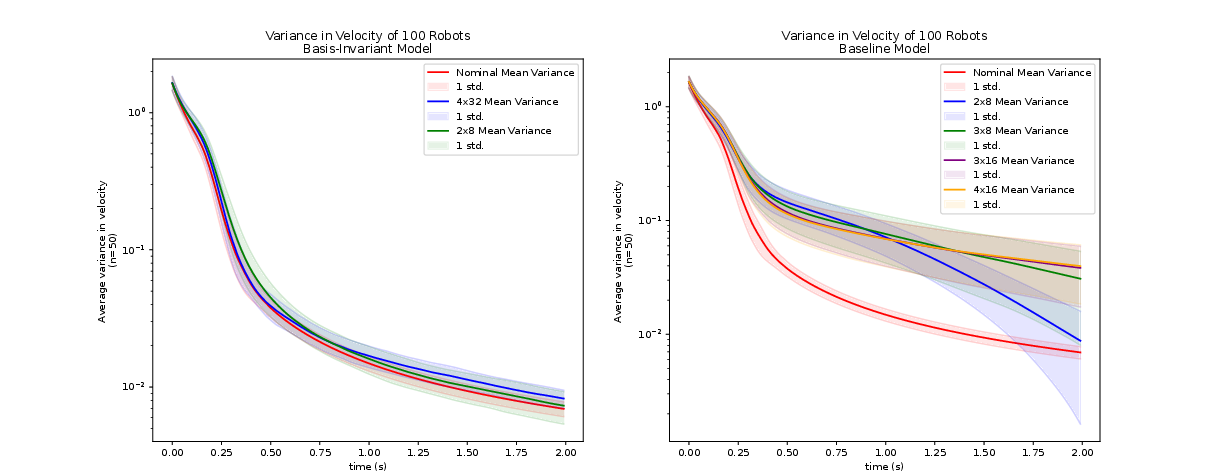
Figure 1: The smallest and largest equivariant models closely track the nominal controller's velocity variance, whereas the baseline GNN shows higher error and greater inconsistency.
Multi-Agent Rollout and Behavior
Visualization of 100-agent swarms reveals near-indistinguishable motion and inter-agent spacing between the nominal controller and the basis-invariant GNN. In contrast, real-valued baselines exhibit spatial bifurcations and incoherent motion, failing to propagate velocity and orientation information effectively across the network.
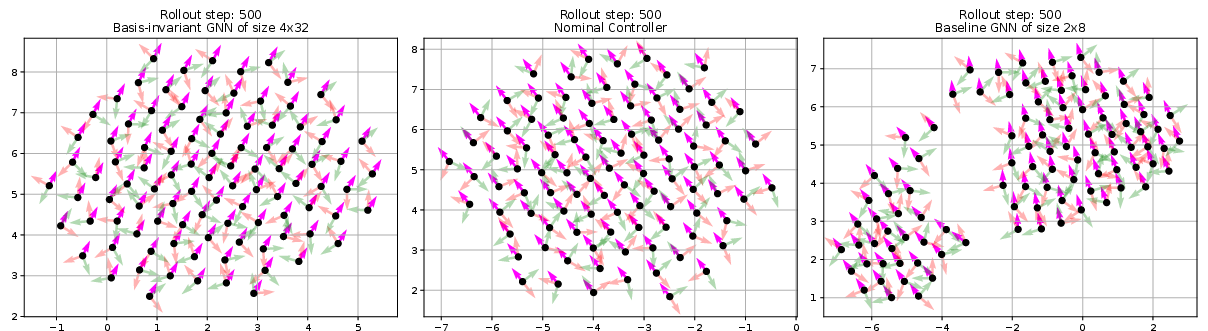
Figure 2: Extended rollouts show highly consistent agent velocities and spacing for the basis-invariant GNN, mirroring the nominal controller, whereas the baseline GNN produces bifurcated and inconsistent agent groupings.
Generalization to Out-of-Distribution Scenarios
Extended simulation runs (beyond training horizon) and reduced communication radii are used to assess generalization. The basis-invariant GNN remains robust, with only minor degradation, while baseline GNNs show rapidly increasing velocity variance and spatial disintegration as they encounter unfamiliar topologies and state transitions.
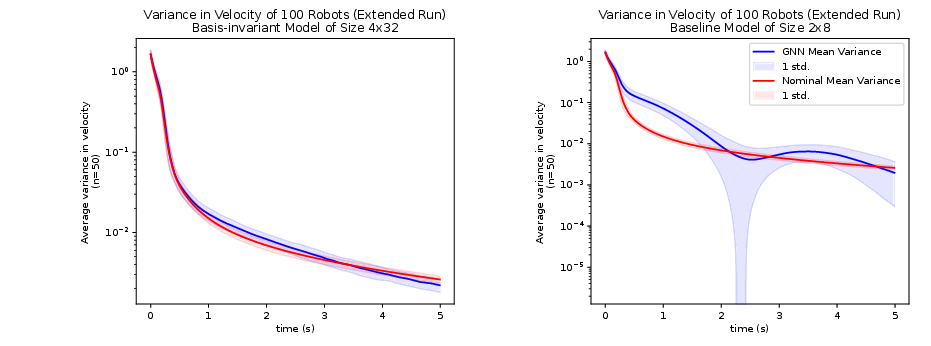
Figure 3: Over long horizons, the invariant GNN maintains low velocity variance consistent with the nominal controller, while the baseline GNN's performance degrades with increased state variance.
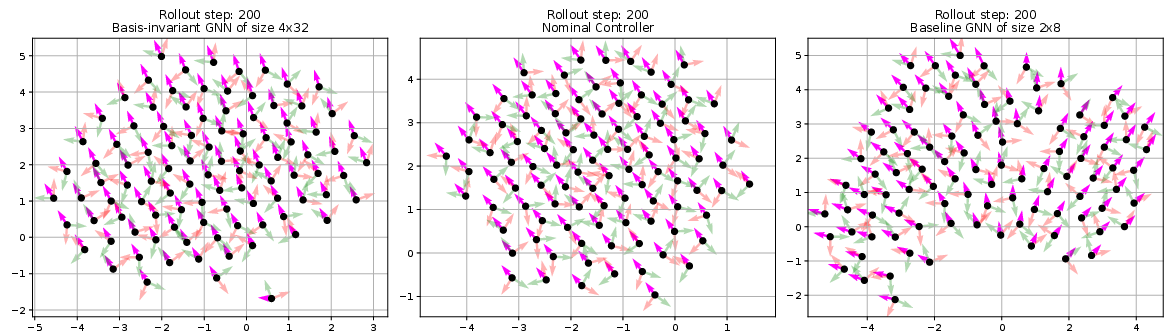
Figure 4: With lower communication radii, velocity variance increases for all models, but basis-invariant GNNs remain within an order of magnitude of optimal, unlike baseline GNNs.
Figure 5: Under communication constraints, the basis-invariant GNN maintains coherent swarm behavior; the baseline GNN rapidly loses coordination and spatial regularity.
Implications and Future Directions
This work demonstrates that complex-valued GNNs can enforce exact frame invariance in distributed planar control, a property previously unattainable with real-valued architectures without explicitly hard-coding geometric priors. The analytic framework suggests broader applicability for control in sensor-limited or adversarial environments, where shared frames cannot be assumed and message representations must retain their geometric meaning through multiple network layers.
Practical implications extend beyond robotic swarms: any decentralized system with local sensing and actuation can potentially leverage these architectures, provided task symmetries are well-characterized. Theoretically, the paper shows that careful parameterization in the complex domain can simplify symmetry constraints, possibly suggesting a broader role for field/representation selection in equivariant deep learning across other compact Lie groups.
A current limitation is the reliance on hand-crafted nonlinear features as input; extensions to allow equivariant, learnable nonlinear aggregation of raw geometric relationships (analogous to higher-order polynomial features or Lie algebra-valued message functions) would be a natural next step.
Conclusion
The complex-valued, locally C3-equivariant GNNs formulated in this work establish a rigorous design methodology for basis-invariant control in planar multi-agent systems. Empirical results show clear superiority in both representational efficiency and robustness compared to real-valued baselines. The approach provides a foundation for deploying learned distributed policies in challenging, reference-frame-agnostic settings and motivates further exploration of complex and group-theoretic parameterizations in geometric deep learning.
(2604.02615)