- The paper introduces neural network-based inversion and differentiable losses to achieve rapid convergence and reduced error in 2D reflector design.
- It presents two loss formulations—direct change-of-variables and mesh-based integration—that effectively handle both continuous and discontinuous source distributions.
- Experiments demonstrate that neural methods outperform classical deconvolution baselines in terms of normalized mean absolute error and compliance with design constraints.
Neural Network Approaches for Finite-Source Reflector Design
The paper addresses the inverse design problem for two-dimensional reflectors tasked with transforming emission from a spatially extended, finite source into a prescribed far-field irradiance pattern. Unlike classical optics approaches, which assume point or collimated sources, finite-source realism introduces nontrivial angular and spatial convolution effects, compounded by the conservation of étendue. The system setup is shown in (Figure 1).
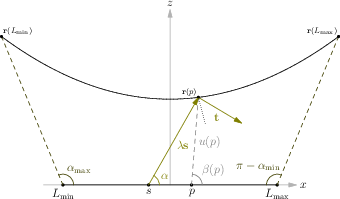
Figure 1: Finite-source-to-far-field reflector system setup, defining optical geometry and emission-conversion constraints.
Finite-source complexity motivates the introduction of neural parameterizations and differentiable losses, surpassing legacy analytic and deconvolution techniques. The mapping from source domain to far-field, entrenched in nonlinear reflector geometries, admits no closed-form forward solution due to the absence of analytic intersection determination, but the inverse mapping—critical for pushing forward illumination distributions—can be constructed analytically.
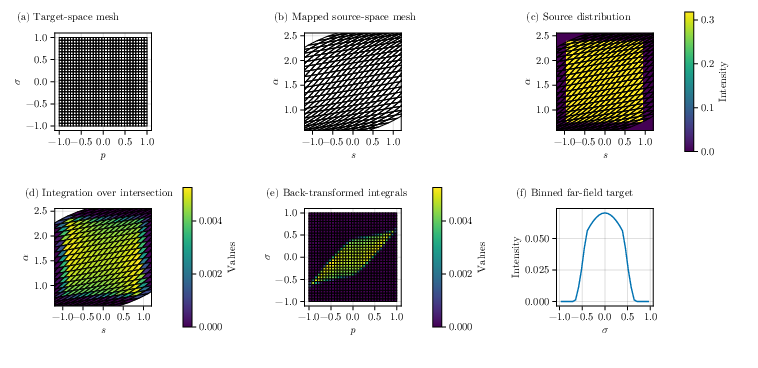
Neural Network Parameterizations and Differentiable Losses
To solve the nonlinear reflector design problem, reflector height u(p) is parameterized via a multilayer perceptron (MLP). Two distinct loss formulations are developed:
Gradients for both losses are computed via automatic differentiation. Optimization proceeds with a robust quasi-Newton algorithm, highlighting the inadequacy of stochastic optimizers (e.g., Adam) for these physics-informed neural parameterizations.
Deconvolution Baseline via Finite-Source Approximation
For benchmarking, a deconvolution baseline is constructed by reducing the angular problem to a monotonic mapping recovered from flux balance, yielding an ODE solvable via integrating factors. This baseline is embedded in a modified Van Cittert iteration, enforcing nonnegativity and employing a ray-traced forward operator for physical consistency. The setup and derivation underpin the ODE formulation (Figure 3) and the reflector profiles for different height constraints (Figure 4).
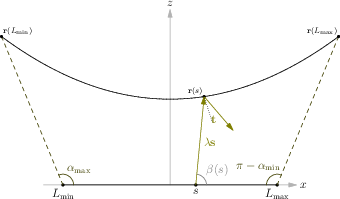
Figure 3: Approximate finite-source system for baseline deconvolution comparison.
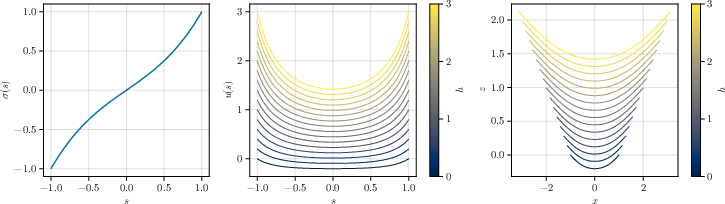
Figure 4: Reflectors for m(s)=s3 with varied h, illustrating constraint-driven reflector profiles from ODE.
A suite of benchmarks evaluates the neural approach against the deconvolution method: continuous and discontinuous sources, both unconstrained and with minimum reflector height constraints. Ray-traced normalized mean absolute error (NMAE) quantifies physical fidelity.
- Example A (Continuous Source): Ground-truth and optimized reflectors are compared, with neural network nearly perfectly reproducing ground-truth profiles and achieving lower NMAE. Neural optimization converges rapidly, outperforming deconvolution in both speed and accuracy (Figure 5 and Figure 6).
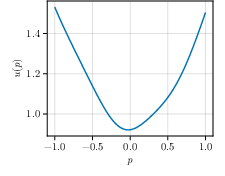
Figure 5: Ground-truth reflector geometry for continuous source benchmark.
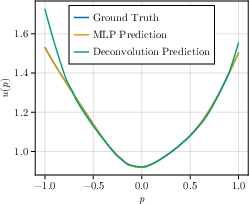
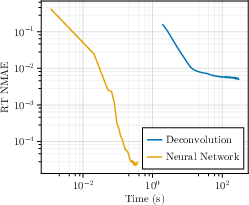
Figure 6: Optimized reflectors (neural vs. deconvolution), demonstrating near-overlap for neural method.
- Example B (Discontinuous Source): Mesh-based neural loss achieves high accuracy under non-smooth source distributions, again with superior convergence and accuracy relative to deconvolution (Figure 7 and Figure 8).
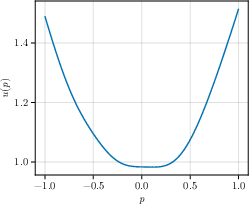
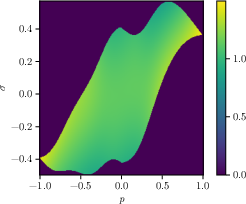

Figure 7: Ground-truth reflector for discontinuous source experiment.
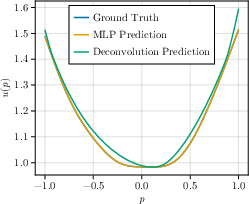
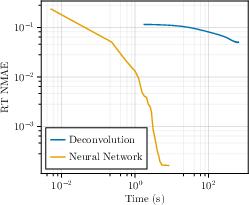
Figure 8: Optimized reflectors under discontinuous source, neural network closely mimics ground truth.
- Examples C & D (Height Constraints): Imposing minimum height constraints, neural network methods consistently yield lower NMAE and rapid convergence above ground-truth heights. Both methods deteriorate as height constraints tighten, with the deconvolution baseline occasionally outperforming neural models for unattainable uniform targets at minimal height, due to direct constraint enforcement. NMAE trends are shown in (Figure 9) and (Figure 10).
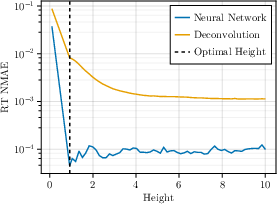
Figure 9: NMAE for varying minimum reflector height hmin with accurate ground truth constraint for neural network and deconvolution.
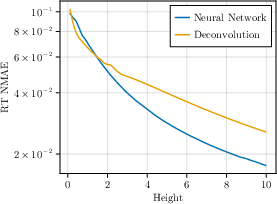
Figure 10: NMAE for uniform target under height constraints, demonstrating crossover at low hmin.
Implications, Extension, and Future Directions
The neural network approach demonstrates robustness across continuous, discontinuous, and constrained reflector design scenarios. Differentiable losses provide superior optimization landscapes compared to semi-analytical deconvolution. The framework is theoretically extensible to full three-dimensional and rotationally symmetric systems, with iterative correction schemes proposed for handling skew rays and bridging the meridional approximation. Three-dimensional mesh-based integration is cited as computationally challenging due to high-dimensional intersection evaluation, but stochastic optimization and smoothing strategies may offer scalability.
In practical terms, neural approaches facilitate rapid, constraint-compliant reflector design for applications such as advanced illumination, solar concentration, and communications. The mesh-based loss ensures reliability in the presence of source discontinuities, critical for real-world deployment.
From a theoretical standpoint, the paper establishes that neural parameterizations, coupled with differentiable physics, outperform classical signal-processing and flux-balance techniques for finite-source optical systems. Considering the scalability, the method supports integration with full 3D differentiable ray tracing pipelines, unlocking more general AI-driven inverse optics design.
Conclusion
This work rigorously compares neural network-based reflector design to deconvolution-driven approaches for transforming extended sources into arbitrary far-field distributions. Neural methods parameterize reflector geometry with MLPs, leveraging two differentiable objective functions to handle both continuous and discontinuous emission profiles. Across all studied benchmarks, neural approaches converge faster and achieve lower physical error (NMAE) than the deconvolution baseline, including under strict height constraints. The differentiable framework and robust optimization extend naturally to more general geometric settings, including 3D and rotationally symmetric reflectors, positioning these neural algorithms as a preferred strategy for finite-source illumination engineering (2604.02184).