- The paper introduces an IMM-based proprioceptive odometry framework that integrates rolling-aware error-state Kalman filtering for robust state estimation under diverse contact conditions.
- It fuses IMU and joint encoder data with adaptive mode probabilities to accurately handle rolling and slipping contacts, reducing drift significantly.
- Evaluation in simulation and real-world trials shows over 40% error reduction and superior performance compared to conventional and learning-based filters.
Legged robots necessitate robust state estimation under diverse and unstructured environments. Proprioceptive odometry (PO), primarily leveraging IMUs and joint encoders, serves as the core solution when exteroceptive sensors are compromised. Conventional PO methodologies rely on the static point-contact assumption, rendering legged odometry vulnerable to drift and degraded accuracy in real-world locomotion, particularly under dynamic terrain interactions such as foot rolling and slippage. The presented work addresses this limitation by proposing an interacting multiple model (IMM)-based PO framework capable of online contact mode inference and robust fusion.
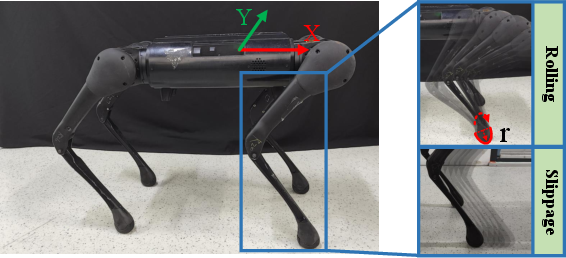
Figure 1: Illustration of rolling and slippery contacts. As the robot advances, foot-ground interaction transitions between rolling and slip dynamics.
The primary innovation lies in explicitly modeling the rolling contact—characterized by deterministic, nonzero stance foot velocity—while simultaneously handling unpredictable slippage via mode-dependent process noise augmentation. The state estimator, based on rolling-aware error-state Kalman filtering (ESKF), is integrated within an IMM architecture, enabling probabilistic adaptation and fusion of multiple contact hypotheses.
Rolling-Aware State Estimation Architecture
The complete pipeline instantiates dual parallel ESKF modules, corresponding to rolling and slippery contact models, and fuses their estimates via mode probabilities determined through likelihood evaluation. The estimator state is augmented with foot velocities to directly capture structured contact-induced motion deviations. The mode probabilities and fused state, updated in real-time, allow accurate pose estimation even under abrupt transitions or terrain irregularities.
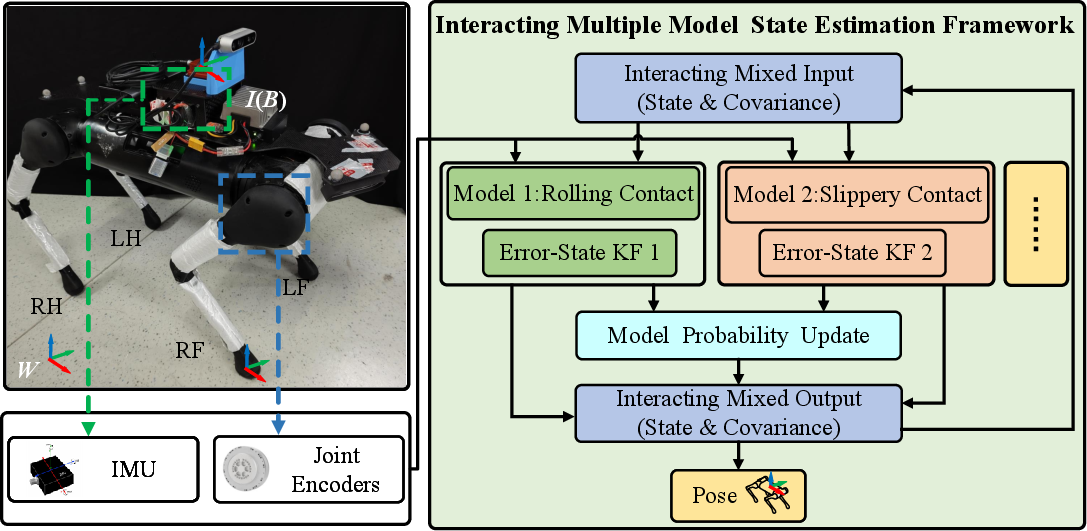
Figure 2: Overview of the proposed IMM-based proprioceptive state estimation, fusing IMU and encoder data across parallel models for rolling and slip dynamics.
Key elements include:
- Sensor fusion: IMU and joint encoder measurements.
- Rolling-aware update: Explicit constraint through augmented foot velocity state.
- Mode switching: Process noise covariance inflation for slip scenarios, performed within the IMM inference loop.
- Efficient error-state representation: Orientation errors managed via rotation vectors, aligning with manifold-based filtering approaches.
Experimental Validation: Simulation and Real-World Scenarios
The framework was evaluated in Gazebo-based simulation and on the AlienGo quadruped robot across a spectrum of conditions—flat, slippery, uneven, and slope terrains. Snapshots illustrate the complexity of tested environments.
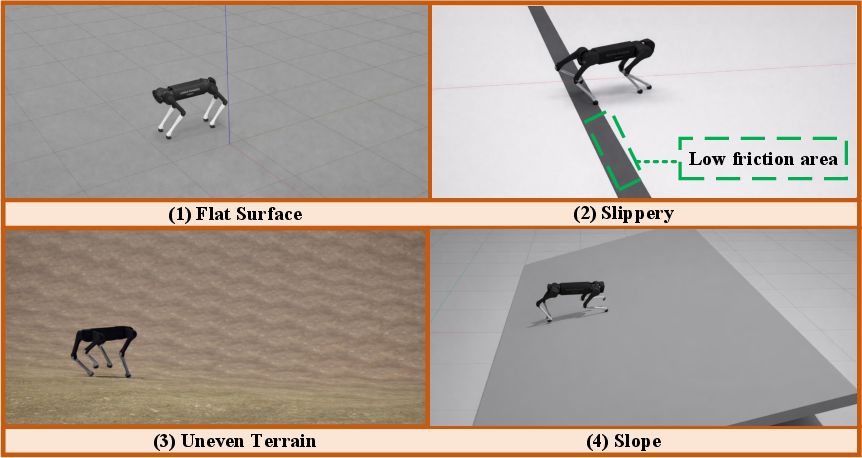
Figure 3: Snapshots of four simulation scenarios, covering flat, slippery, uneven, and slope terrains.
Straight line trajectories on flat terrain demonstrate that rolling-aware estimation (ESKF-R) reduces position error (ATE/RPE) by >40% compared to invariant EKF (IEKF). IMM-PO further decreases errors by >17%. In circular and sinusoidal scenarios, IMM-PO achieves up to 70% reduction in position ATE over IEKF and substantial attitude error improvements.
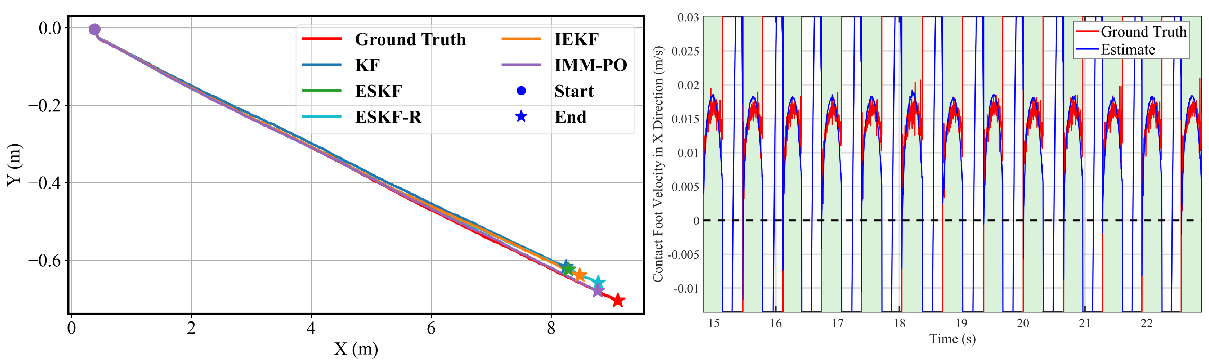
Figure 4: Comparison of estimated and ground truth trajectories; nonzero foot velocity profiles corroborate the rolling contact assumption.
In slippery scenarios, IMM-PO effectively mitigates drift—ATE reduced almost 70% relative to conventional models. On uneven and slope terrains, IMM-PO's adaptive fusion maintains minimized drift even as rolling models are only approximations. Mode probabilities track the contact phase, evidencing adaptive switching (Figure 5).
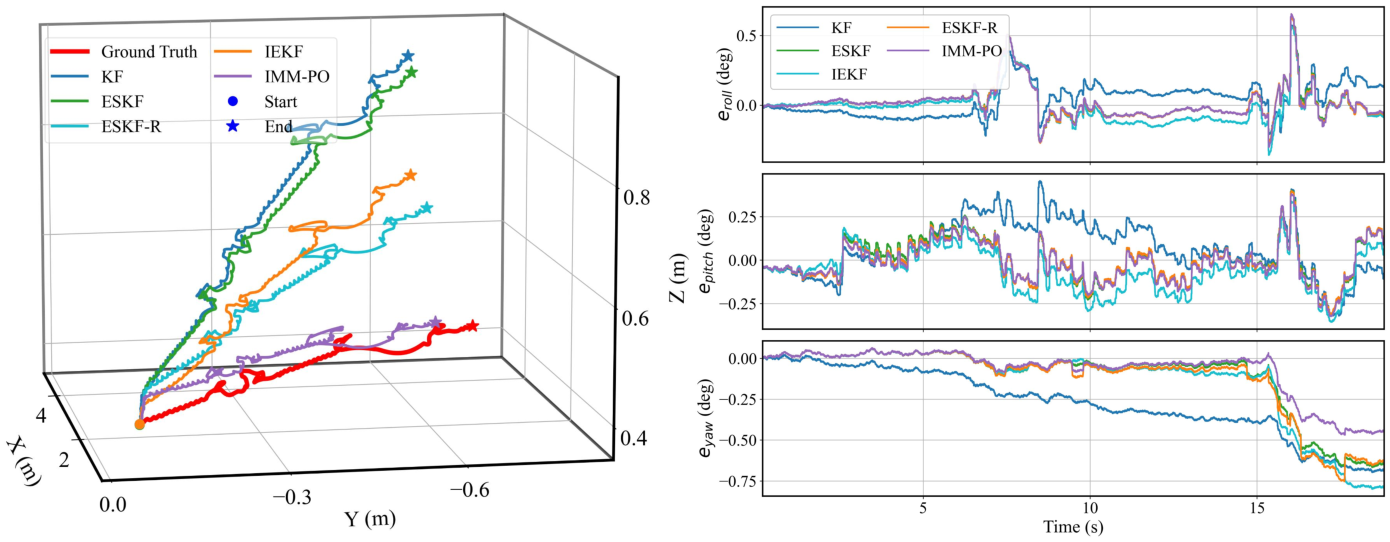
Figure 6: Estimated trajectories and attitude errors in the slippery scenario, showing IMM-PO's superior drift correction.
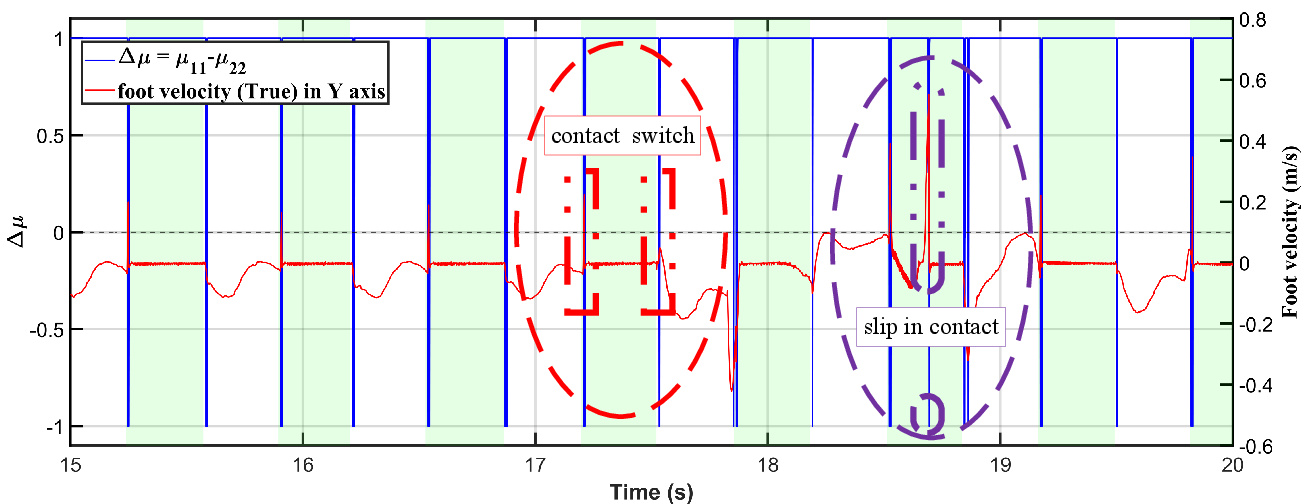
Figure 5: Mode switching dynamics in IMM-PO correlate with ground truth foot velocity changes, reflecting responsiveness to slip events.
Real-World Results
Two scenarios (flat and complex terrain) were carried out indoors with high-precision motion capture as ground truth. In both sequences, IMM-PO outperformed all baselines, including learning-based KalmanNet, delivering the smallest position and attitude drift. KalmanNet exhibited local consistency but large global error accumulation over extended sequences.
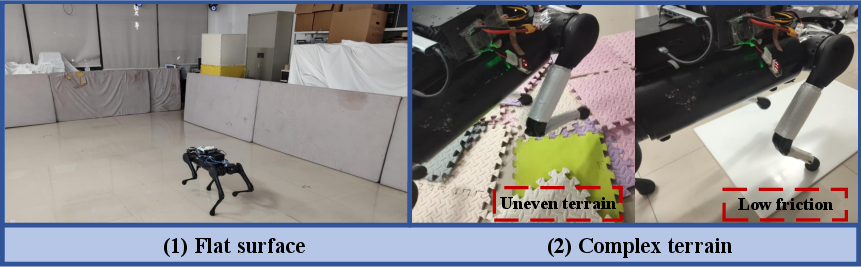
Figure 7: Snapshots from real-world experiments on flat and complex terrain.
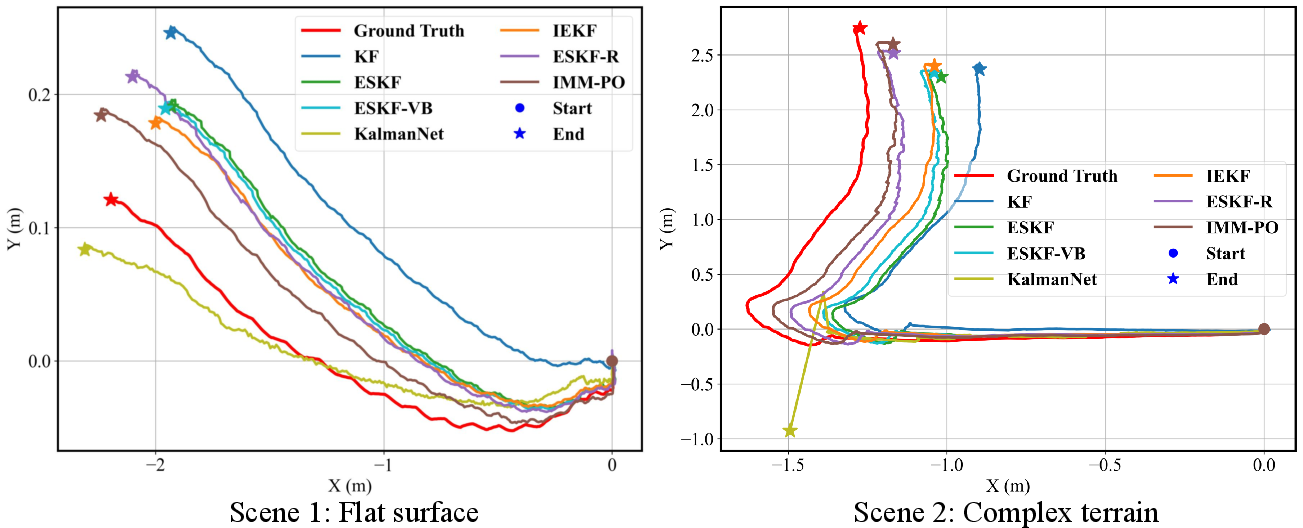
Figure 8: Estimated trajectories for flat and complex terrain; IMM-PO maintains tight congruence with ground truth.
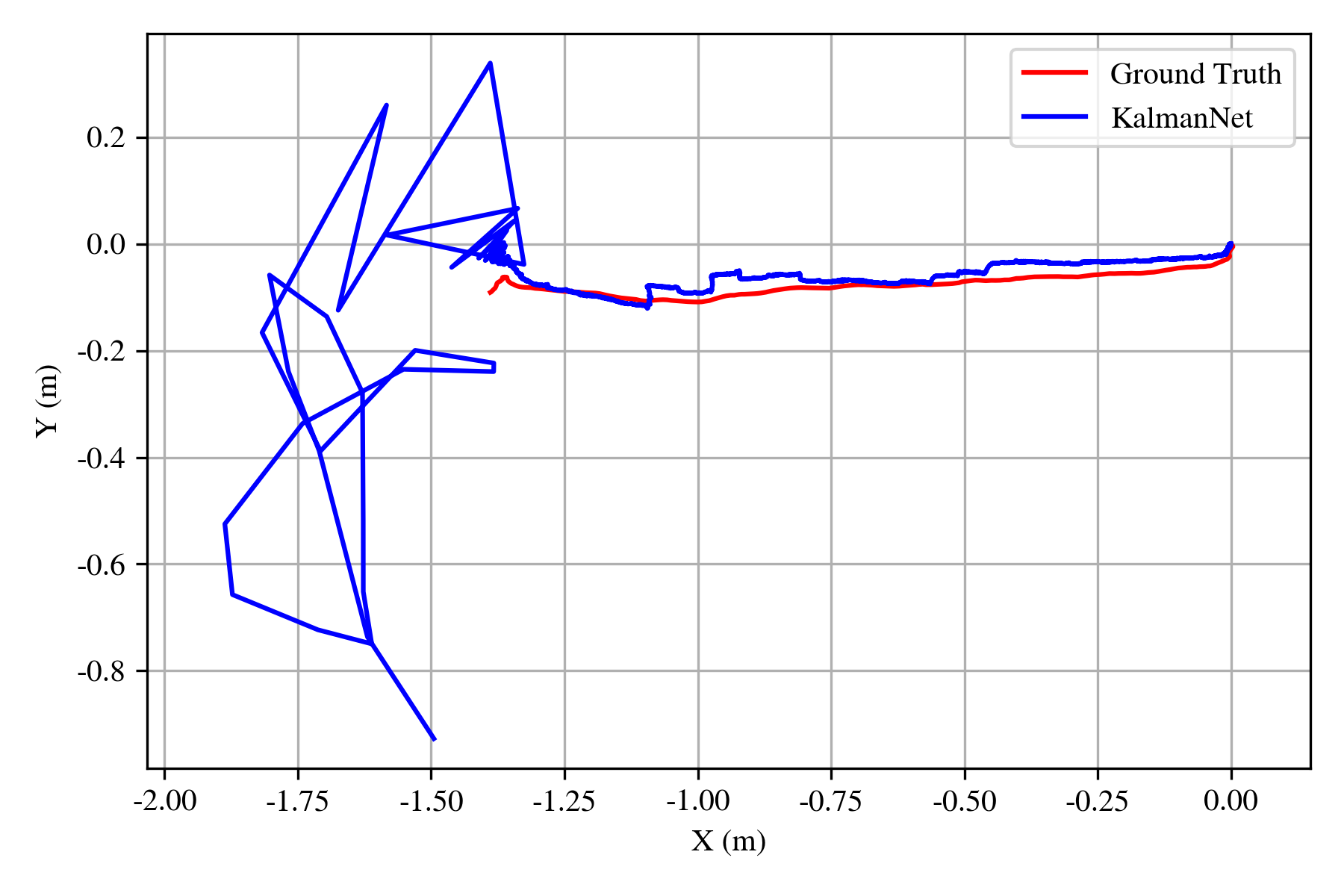
Figure 9: KalmanNet's XY trajectory divergence over long horizons demonstrates the necessity for robust probabilistic adaptation.
Ablation Study and Computational Considerations
A rigorous ablation analysis in slippery conditions confirms the value of dynamic contact modeling. Fixed-noise estimators (ESKF-R, ESKF-L) exhibit inadequate adaptation to slip, yielding higher ATE/RPE. IMM-PO (two-mode realization) achieves optimal accuracy with only a marginal computational overhead (~1ms/step), significantly outperforming non-interactive IMM and three-mode IMM variants (IMM-T). The adaptive mode probabilities consistently respond to foot velocity disturbances during both sustained slip and transient contact events.
KalmanNet Baseline: Limitations and Training Strategy
KalmanNet, a neural network-aided filter, struggles with high-dimensional, contact-switching environments. Enhanced training (curriculum learning, eigenvalue regularization) improves short-term performance but global trajectory consistency remains deficient due to recursive stability issues—evident by the spectral radius analysis.
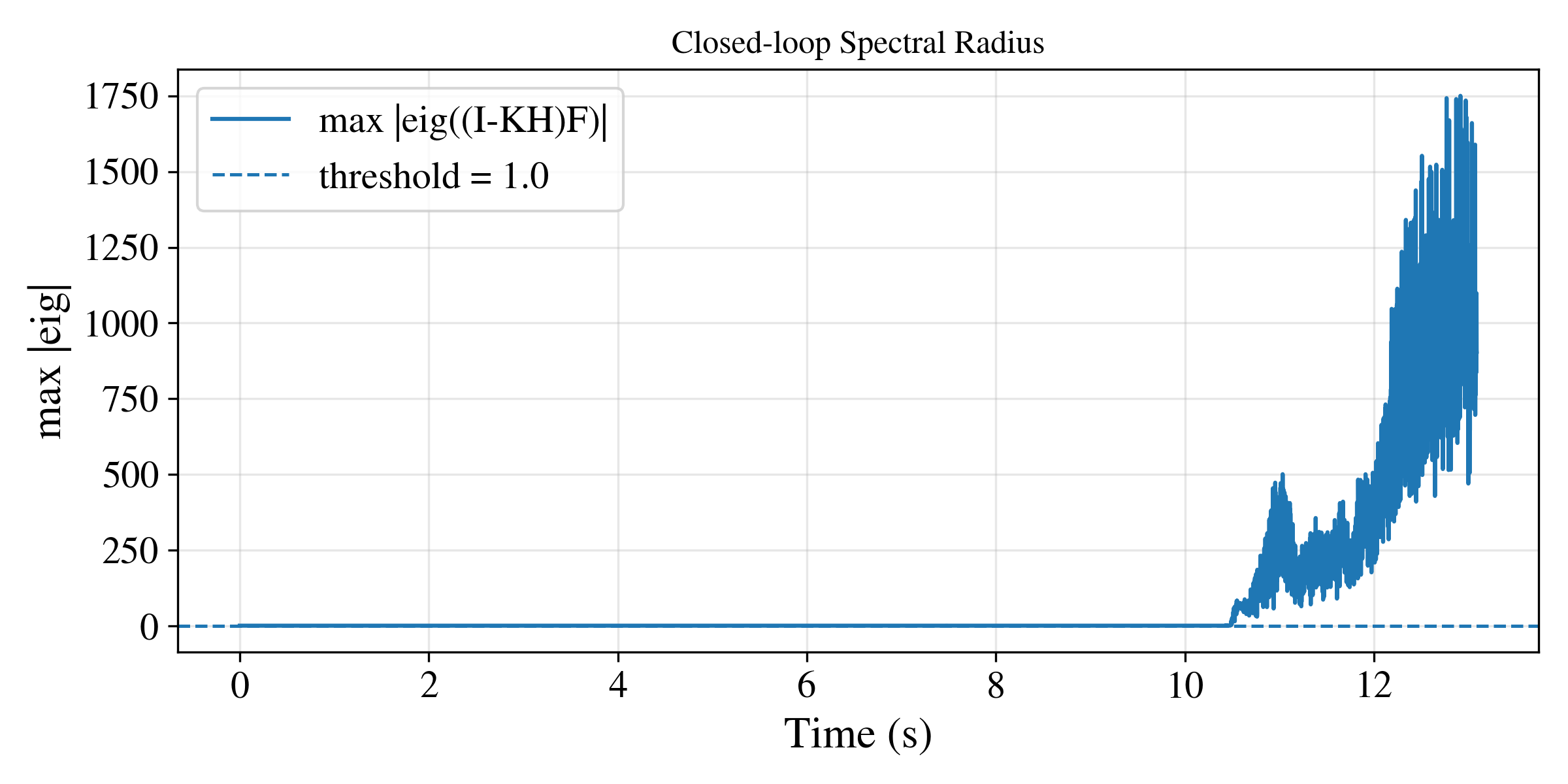
Figure 10: Closed-loop stability indicator demonstrating deteriorating filter stability over time for KalmanNet on long sequences.
Theoretical and Practical Implications
The explicit incorporation of foot velocity and contact dynamics within a probabilistic filtering architecture advances PO robustness against slippage, contact uncertainty, and terrain-induced disturbances. This methodology yields improved estimator consistency without significant computational penalty, enabling real-time applicability. The approach further underscores the superiority of model-informed probabilistic adaptation versus heuristic or learned thresholding, especially under nonstationary contact dynamics.
Practically, the framework enables reliable PO for legged robots in environments devoid of exteroceptive signals—a crucial requirement for navigation in occluded, reflective, or degraded settings. Theoretically, extending IMM filtering to non-ideal contact models paves the way for advanced inference in switching hybrid dynamical systems, broadening the horizon for adaptive state estimation methodologies in robotics.
Conclusion
The proposed IMM-based proprioceptive odometry provides accurate, robust state estimation for legged robots under dynamic foot-ground interaction, explicitly modeling rolling and slip-induced uncertainties. Empirical results in simulation and real robotics deployments validate the superiority of adaptive multi-model inference over conventional or purely learning-based baselines. The method balances estimation accuracy, robustness, and computational efficiency, establishing a new paradigm for proprioceptive filtering in complex terrain and contact scenarios. Further development should explore finer mode discretizations, integration with exteroceptive cues, and application to whole-body humanoid state estimation architectures.

