- The paper introduces a framework that uses boundary polynomials to map graph structures to dynamical behaviors, enabling automated qualitative analysis of equilibria and bifurcations.
- It employs weighted boundary polynomials to derive analytic expressions for stability transitions and Lyapunov numbers, offering a combinatorial approach to limit cycle enumeration.
- The study highlights practical implications for network synthesis and AI modeling by establishing a taxonomy of dynamical behaviors based on classical and weighted graph configurations.
Graph-Theoretic Methods for Qualitative Analysis of Dynamical Systems
Boundary Polynomials: Definitions and Fundamental Properties
This paper advances the mathematical bridge between discrete graph theory and the qualitative analysis of continuous dynamical systems. It emphasizes the utility of boundary polynomials in representing and analyzing properties crucial to the study of two-dimensional ODEs, including equilibrium classification, limit cycle detection, and bifurcation scenarios. The boundary polynomial B(G;x,y), defined for a graph G of order n, enumerates vertex subsets weighted by boundary edges and subset cardinality, linking combinatorial invariants with dynamical behaviors. The paper extends this to weighted boundary polynomials, Bw(G;x,y), where custom weight functions allow for algebraic cancellations and sign management, further encoding dynamical subtleties.
Boundary Polynomial-Driven Dynamical Systems
The authors demonstrate how graph families (complete and empty graphs) parameterize dynamical systems where the equilibrium at (1,1) can be classified as saddle, node (stable/unstable), or degenerate purely in terms of n1 and n2, the orders of the graphs G1 and G2. The Jacobian analysis yields analytic expressions for eigenvalues and the transition among stability types, reinforcing the capacity of boundary polynomials to encode nonlinear behaviors. This algebraic-combinatorial mapping facilitates automated stability analyses for structured population dynamics, neural networks, or coupled oscillator systems.
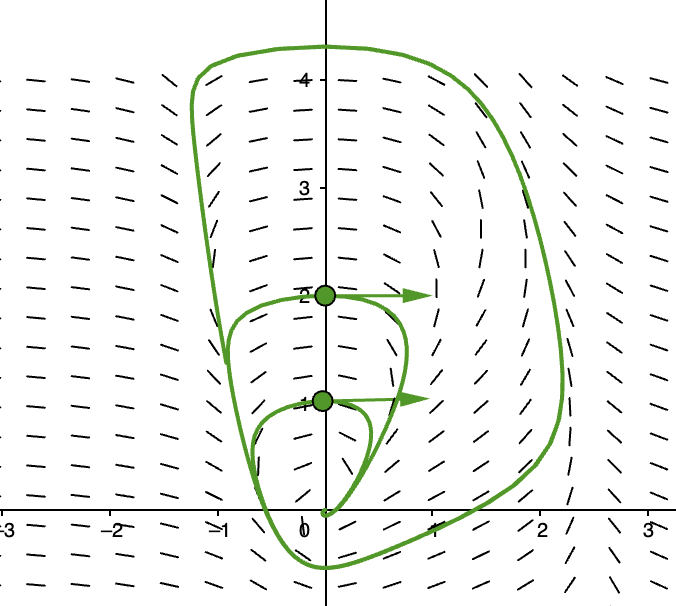
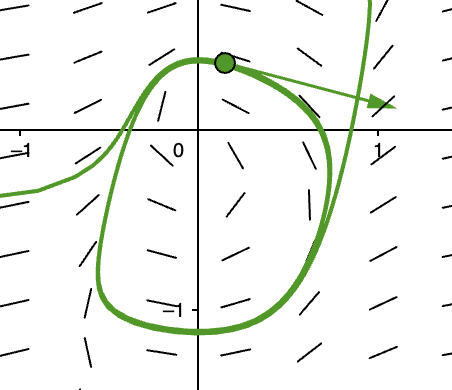
Figure 1: Examples of G1 (left: several classical configurations) versus G0 (center: variations), and the resulting stability at G1 (right: topological saddle, unstable node, or stable node).
Limit Cycles and the Liénard System: Combinatorial Enumeration
The paper recasts classical results for the Liénard system using weighted boundary polynomials. The number and nature of limit cycles, their stability, and bifurcation behaviors are algebraically tied to the graph structure and the weight configuration. For G2 of odd order G3, the maximum number of local limit cycles is bounded by G4, congruent with established results but derived via combinatorial expansions rather than analytic integrals. The roots of associated polynomials encode the radii of limit cycles, permitting constructive approaches for synthesizing systems with prescribed cycle distributions.
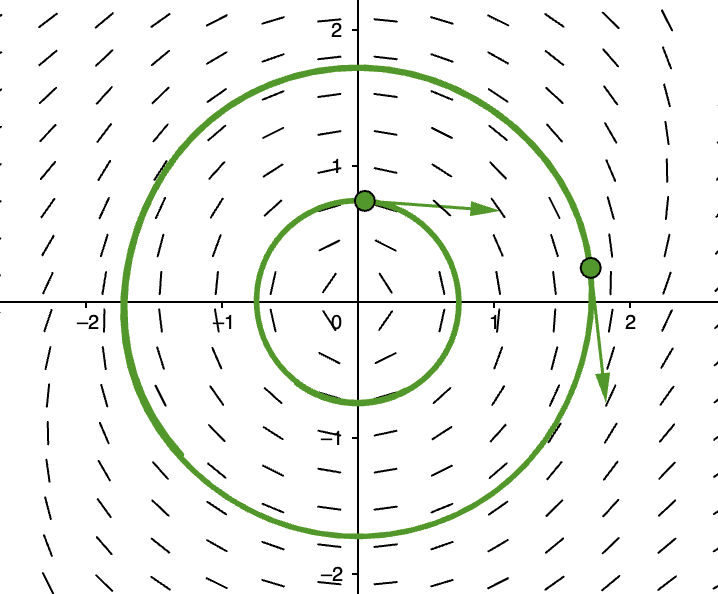
Figure 2: Two limit cycles (left) with radius G5 and G6, and the associated graph structure (right) inducing the desired polynomial roots.
The boundary polynomial framework also identifies graphs that cannot produce certain cycle configurations, such as the inability of complete graphs G7 (for G8 odd, G9) to produce n0 limit cycles with prescribed radii, reflecting rigid combinatorial constraints.
Stability, Hopf Bifurcation, and Lyapunov Numbers via Graph Structure
The connection between boundary polynomials and classical bifurcation theory is systematically established. Systems constructed with complete graphs of even order generate stable unit-circle limit cycles, a result elegantly proven via expansion properties of the boundary polynomial and Poincaré map derivatives. Moreover, systems parameterized by boundary polynomials can universally guarantee the stability of the unit circle independent of the underlying graph.
The Hopf bifurcation analysis is reformulated in terms of the boundary polynomial coefficients. Lyapunov numbers governing focus multiplicity, cycle stability, and bifurcation criticality are shown to be explicit functions of graph combinatorics:
n1
This algebraic dependence enables a rules-based approach to bifurcation analysis. For instance, complete graphs with no pendant vertices (n2) cannot yield negative Lyapunov numbers, thus cannot guarantee stable limit cycles via Hopf bifurcation.
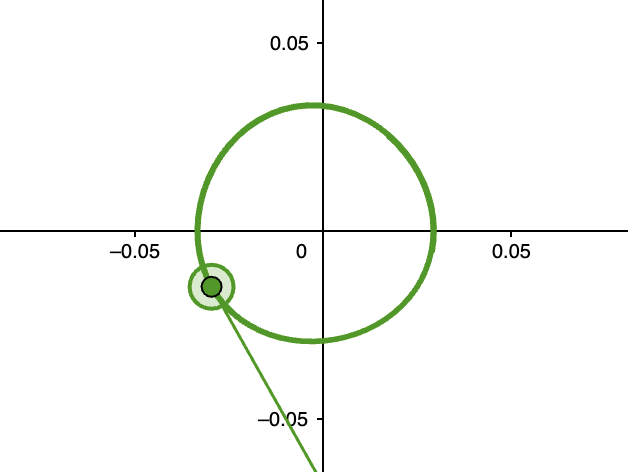
Figure 3: Example with n3 and n4; system trajectories under slight perturbation exhibit bifurcating limit cycles.
Classical Graphs and Cycle/Bifurcation Classification
The paper presents exhaustive results for classical graphs (star, path, cycle, wheel), specifying their role in cycle formation and bifurcation structure. Notably, pendant vertices (captured combinatorially) dictate possibilities for super/subcritical Hopf bifurcations. The Lyapunov number signatures for disjoint unions, and for graphs with varying degree configurations, provide a combinatorial taxonomy for dynamical behaviors.
Theoretical and Practical Implications
This graph-theoretic encoding of dynamical properties offers a pathway to algorithmic and symbolic analysis of nonlinear systems. The approach abstracts stability and bifurcation questions to problems of graph enumeration and polynomial root finding, enabling computational strategies at scale. Importantly, the results provide structural constraints (and flexibility) for system synthesis—one can design networks with prescribed cycle/bifurcation properties via graph selection and boundary polynomial engineering.
For AI and complex systems modeling, the implications are profound. Dynamics of large-scale agent systems, neural models, and coupled oscillator ensembles can be analyzed using combinatorial invariants, supporting model checking, parameter optimization, and automated synthesis of robust behaviors.
Conclusion
The boundary polynomial framework introduced in this work unifies graph theory and dynamical systems analysis, encoding critical qualitative phenomena as combinatorial sums and algebraic constraints. This formulation enables both rigorous theoretical insights and emergent computational methodologies, promising advances in nonlinear dynamics, network science, and AI modeling. The methodology's applicability to limit cycle enumeration, stability classification, and bifurcation analysis demonstrates its capacity to reframe longstanding analytical problems in terms of discrete structures, setting the stage for further exploration of computational and symbolic dynamical systems analysis.