Pixel-Accurate Epipolar Guided Matching
Abstract: Keypoint matching can be slow and unreliable in challenging conditions such as repetitive textures or wide-baseline views. In such cases, known geometric relations (e.g., the fundamental matrix) can be used to restrict potential correspondences to a narrow epipolar envelope, thereby reducing the search space and improving robustness. These epipolar-guided matching approaches have proved effective in tasks such as SfM; however, most rely on coarse spatial binning, which introduces approximation errors, requires costly post-processing, and may miss valid correspondences. We address these limitations with an exact formulation that performs candidate selection directly in angular space. In our approach, each keypoint is assigned a tolerance circle which, when viewed from the epipole, defines an angular interval. Matching then becomes a 1D angular interval query, solved efficiently in logarithmic time with a segment tree. This guarantees pixel-level tolerance, supports per-keypoint control, and removes unnecessary descriptor comparisons. Extensive evaluation on ETH3D demonstrates noticeable speedups over existing approaches while recovering exact correspondence sets.

Paper Prompts
Sign up for free to create and run prompts on this paper using GPT-5.
Top Community Prompts
Explain it Like I'm 14
Pixel-Accurate Epipolar Guided Matching — Simple Explanation
What this paper is about (big picture)
This paper is about a faster and more reliable way to find the same “interesting points” (keypoints) in two different photos of the same scene. This job—called feature matching—is a key step in building 3D models (Structure‑from‑Motion), mapping for robots (SLAM), and augmented reality.
When the relationship between the two cameras is known, geometry tells us that the matching point in the second image must lie close to a special line called the epipolar line. The paper introduces a new, exact way to use this rule so the computer checks far fewer points, works faster, and doesn’t miss good matches.
What the researchers wanted to achieve
- Make keypoint matching faster, especially when textures repeat or the viewpoints are very different.
- Use geometric rules (epipolar geometry) precisely, in pixel units, without rough shortcuts that can miss or add wrong candidates.
- Let each point have its own tolerance (how many pixels of wiggle room) if needed.
- Avoid wasting time comparing descriptors for points that can’t possibly match.
How their method works (in everyday terms)
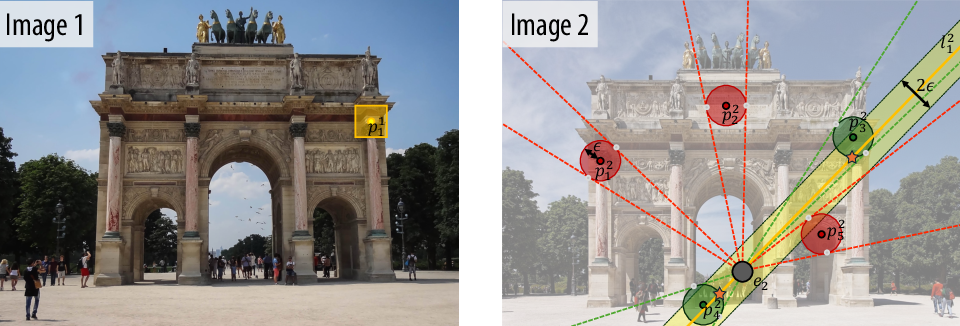
Think of the epipole as a “lighthouse” in the second image. The epipolar line is like a beam of light pointing out from this lighthouse. Only points close to this beam are worth checking.
Instead of checking every point’s distance to the beam (slow), the method flips the problem:
- Around each keypoint in image 2, draw a tiny circle (the allowed pixel tolerance).
- From the lighthouse (epipole), that circle looks like a small range of directions (an angular interval).
- Now, for each query point from image 1, compute the direction of its beam (the epipolar line) from the lighthouse.
- If the beam’s direction falls inside a point’s angular interval, that point is a valid candidate; if not, ignore it.
To do this quickly, they use a “segment tree,” which you can imagine as a well-organized bookshelf of angle ranges. It lets the computer find all points whose intervals contain a given angle in about logarithmic time (much faster than checking all points one by one).
Key ideas explained simply:
- Epipolar line: In the second photo, the matching point must lie near this line.
- Epipole: The spot where all those epipolar lines meet; it’s the projection of the other camera into the image.
- Tolerance circle: A small circle around a keypoint that says “close enough” in pixel terms.
- Angular interval: From the epipole’s point of view, which directions would hit that circle.
- Segment tree: A data structure that lets you quickly find which intervals contain a given angle.
A few practical details they handle:
- Lines don’t have a direction (line at angle θ is the same as θ+π), so they keep angles within a half-turn range.
- If an interval wraps around the 0/π boundary, they split it into two pieces so lookup stays correct.
- If a keypoint sits right next to the epipole, its circle covers all directions (so it’s always a candidate).
After this fast geometric filtering, the usual descriptor matching (like SIFT + nearest neighbor or Lowe’s ratio test, or GMS filtering) is done, but now only on a much smaller, more relevant set of candidates.
What they found and why it matters
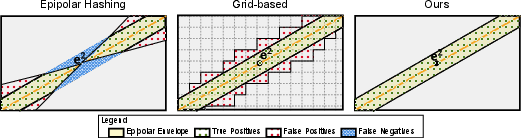
- It’s exact: The method returns exactly the points within the chosen pixel tolerance—no approximations, no missed valid candidates—so there’s no need for extra cleanup steps.
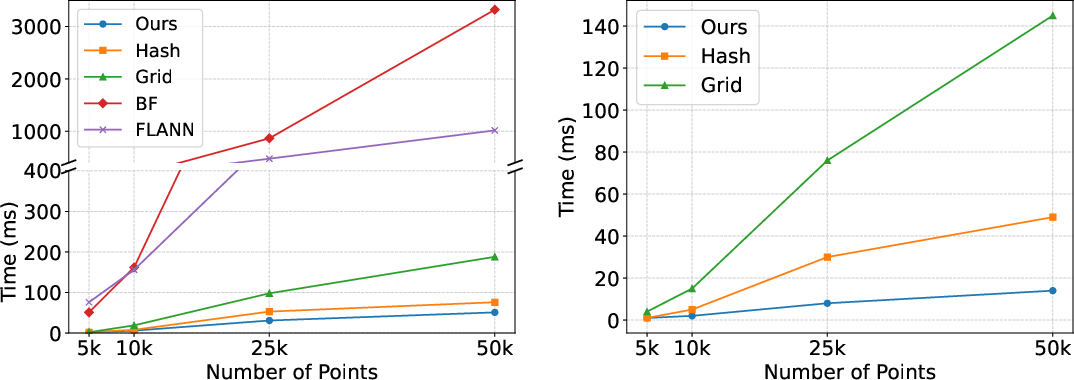
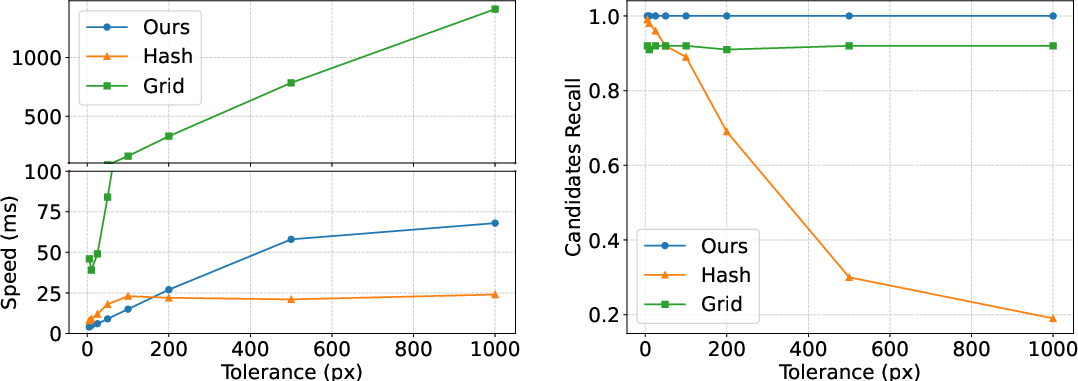
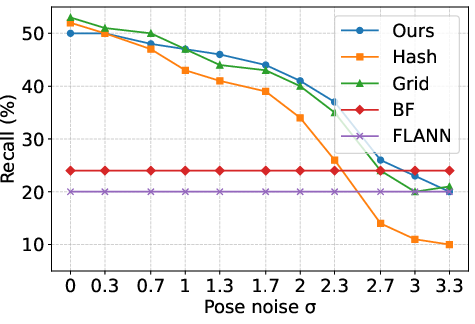
- It’s faster: On the ETH3D benchmark, the method speeds up candidate selection compared to popular “grid” or “epipolar hashing” approaches, and cuts down unnecessary descriptor comparisons.
- It’s flexible: You can set the tolerance in pixels, even differently for each keypoint, which is helpful if some points are less reliable than others.
Why this is important:
- Faster and more reliable matching makes 3D reconstruction and mapping quicker and more robust, especially in tricky cases like repeating patterns (e.g., windows, fences) or very different camera views.
- Saving computations can be crucial on devices with limited power, like drones or robots.
What this could change going forward
- Better real-time performance for SLAM (robots/localization), AR apps, and Structure‑from‑Motion pipelines.
- More stable matching in tough environments (repetitive textures, wide camera baselines).
- Easier control over matching precision thanks to pixel‑level tuning.
- Because the code is open-source, others can build on it for new research or products.
In short: by turning a 2D “search near a line” into a 1D “search by angle” problem and using a smart index, the paper delivers a precise, fast way to find match candidates—helping computers understand the 3D world more efficiently.
Knowledge Gaps
Knowledge gaps, limitations, and open questions
Below is a focused list of what the paper leaves missing, uncertain, or unexplored, framed to guide actionable future research.
- Dependence on known, accurate geometry: The method assumes a reliable fundamental matrix or relative pose. Sensitivity to calibration/pose errors is not quantified, nor are strategies for propagating uncertainty in into per-keypoint tolerances or adaptively inflating .
- Bootstrapping when geometry is unknown or unreliable: The paper does not address how to integrate the angular filter into iterative pipelines that jointly estimate (e.g., alternating match-and-estimate loops, convergence behavior, and robustness to poor initializations).
- Choice and adaptation of tolerance : There is no principled method for selecting (global or per-keypoint) from image noise, detector scale, pose uncertainty, or scene depth; per-keypoint tolerance is claimed but not evaluated or operationalized.
- Anisotropic/elliptical error models: The approach assumes circular (isotropic) pixel tolerances. Extending the angular interval formulation to Sampson/reprojection-error-based envelopes (elliptical in image space) is not addressed.
- Near-epipole regimes and in-image epipoles: While corner cases are mentioned, the impact on candidate-set size (), latency, and numerical stability when many points lie close to the epipole (intervals expand toward ) is not characterized; mitigation strategies (e.g., radial gating, adaptive pruning) are left open.
- Numerical robustness and exactness in finite precision: Theoretical equivalence between the angular test and point–line distance is asserted, but tolerances for floating-point error, angle wrap-around, and boundary handling (0/π splits) are not formally analyzed or stress-tested.
- Dynamic updates and parameter changes: The segment tree supports fixed intervals built from a chosen . Efficient support for dynamic per-keypoint/per-query tolerance changes, or for adding/removing keypoints without rebuilding, is not discussed.
- Data-structure alternatives and engineering trade-offs: No ablation versus other interval structures (e.g., interval trees, Fenwick trees on circular domains) or analysis of cache behavior, SIMD/GPU suitability, and constant-factor costs on very large (e.g., ≥106 keypoints).
- Scaling to multi-view settings: The method is pairwise. Reuse of the index across many queries from multiple source images, multi-target indexing, or joint multi-view candidate generation in SfM/SLAM is not explored.
- Integration with learned matchers: Potential benefits/risks of pre-filtering for SuperGlue, LoFTR, or dense matchers (e.g., training-time geometric priors, inference-time speed/accuracy trade-offs) are not evaluated.
- Non-pinhole and non-static camera models: Extensions to fisheye/omnidirectional cameras (epipolar curves), rolling-shutter models, or generalized cameras are not covered; the angular-interval logic for curved epipolar loci remains open.
- Lens distortion and metric definition of “pixel-accurate”: It is unclear whether matching operates in undistorted space and how “pixel” distances relate to reprojection error with residual distortions; impact on true geometric fidelity is not analyzed.
- Descriptor-stage effects and scoring: With small candidate pools, Lowe’s ratio test can be less discriminative. Beyond mentioning GMS, the paper does not propose or evaluate candidate-set-aware scoring or confidence measures tailored to guided matching.
- Reference direction for epipolar line angle: The angle is defined via the line’s point closest to the image center. Invariance to this choice and numerical stability near degenerate configurations are not justified or compared to alternatives (e.g., boundary intersection).
- Symmetric matching and cross-checks: Using the structure in both directions (1→2 and 2→1) and enforcing mutual consistency is not discussed; effects on recall/precision and runtime are unknown.
- Candidate prioritization: The method returns exact candidate sets but does not investigate ranking heuristics (e.g., smaller angular deviation, approximate point–line distance) to order descriptor comparisons when is large.
- End-to-end impact on SfM/SLAM: While candidate generation and match recall are reported, downstream effects on RANSAC iterations, model estimation time, reconstruction accuracy, and SLAM robustness are not quantified.
- Dataset and sensor diversity: Evaluation is limited to ETH3D with SIFT. Generalization across datasets (KITTI, HPatches, MegaDepth), sensors (wide-FOV/fisheye), and descriptors (ORB, SuperPoint, D2-Net, learned features) remains untested.
- Robustness to challenging conditions: The method’s behavior under extreme baselines, severe viewpoint/illumination changes, dynamic scenes, and heavy occlusions is not systematically evaluated; how to relax/gate geometry to avoid discarding valid dynamic matches is open.
Practical Applications
Immediate Applications
Below are actionable, deployable-now use cases that leverage the paper’s pixel-accurate, angular epipolar filtering and segment-tree querying to accelerate and robustify feature matching whenever a fundamental matrix or relative pose is available.
- Robotics and SLAM front-ends (Sector: robotics, autonomy)
- Use case: Replace brute-force/FLANN candidate generation in visual odometry and SLAM (e.g., ORB-SLAM2/3, OKVIS, VINS-Fusion) with the angular interval query to cut descriptor comparisons and reduce false matches in repetitive or low-texture scenes.
- Tools/workflows:
- A ROS node or C++ module that ingests predicted pose (from motion model/IMU) and image keypoints, builds the segment tree for the target image, and returns exact candidates per query.
- Per-keypoint tolerance ε driven by tracked-feature uncertainty (e.g., from an EKF).
- Assumptions/dependencies:
- Need a reasonably accurate F or pose prior; choose ε to cover pose/calibration error.
- Undistort images or work in normalized coordinates for accurate epipolar geometry.
- Near-epipole frames may return large candidate sets; expect reduced speedups.
- Mobile AR/VR tracking (Sector: software, consumer devices)
- Use case: On-device guided matching for AR frameworks (e.g., ARKit/ARCore-like pipelines) using poses from IMU-visual fusion to limit comparisons and stabilize tracking in indoor, repetitive settings.
- Tools/workflows:
- SDK plugin that prefilters candidate edges for descriptor matching or attention-based matchers.
- Adaptive ε set per frame from pose covariance.
- Assumptions/dependencies:
- Accurate time-synced IMU/camera extrinsics; rolling-shutter effects should be minimized or modeled.
- Tight ε risks missing matches if pose drift spikes; adapt ε in real time.
- Photogrammetry and SfM acceleration (Sector: surveying, construction, AEC, cultural heritage)
- Use case: Speed up pairwise matching in COLMAP/OpenMVG-style pipelines when pairwise poses are available (from GNSS/INS, rough VO, or prior alignment), reducing CPU hours for large reconstructions.
- Tools/workflows:
- A “guided-matching” backend in SfM pipelines that switches to angular queries once a pose graph exists; batch-building segment trees for image clusters.
- Assumptions/dependencies:
- Initial SfM bootstrapping still needs unguided matching or wide ε; thereafter guided matching dominates.
- Camera intrinsics/extrinsics must be consistent; strong distortion requires rectification.
- Autonomous driving and multi-camera rigs (Sector: automotive)
- Use case: In surround-view stereo/multi-view systems, quickly retrieve candidate correspondences consistent with known calibrated baselines to reduce perception compute and latency.
- Tools/workflows:
- Per-camera-pair segment trees updated at frame rate; edge cases (in-image epipoles) handled via full-interval fallback.
- Assumptions/dependencies:
- Accurate calibration is critical; vibrations/thermal drift increase ε requirements.
- Dynamic objects can violate epipolar constraints; combine with motion segmentation.
- Industrial inspection and robotics arms (Sector: manufacturing, energy)
- Use case: Fast, reliable matching for calibrated inspection setups (e.g., robot-mounted cameras around turbines, pipelines, or assembly lines) where geometry is known.
- Tools/workflows:
- Drop-in module in vision-based pose estimation and change detection pipelines; per-feature ε tied to local texture/contrast.
- Assumptions/dependencies:
- Rigid scenes; if the object or camera moves unpredictably without updated pose, widen ε accordingly.
- Film/VFX camera tracking and 3D match-moving (Sector: media & entertainment)
- Use case: Accelerate match-moving by filtering candidates with epipolar envelopes derived from provisional camera solves, improving throughput on long shots with repetitive patterns (e.g., facades).
- Tools/workflows:
- Plugin for Nuke/Blender/Metashape pipelines to switch to guided candidate retrieval after initial solve.
- Assumptions/dependencies:
- Depend on quality of provisional camera trajectories; recalibrate ε after each solver iteration.
- Education and academic baselines (Sector: academia)
- Use case: A precise baseline for geometry-guided matching lectures, labs, and benchmarking against epipolar hashing/grid methods.
- Tools/workflows:
- Open-source C++/Python reference implementation with segment-tree index API and ETH3D demo scripts.
- Assumptions/dependencies:
- Students must understand epipolar geometry and calibration; undistortion recommended.
- Consumer photogrammetry and 3D scanning apps (Sector: consumer software)
- Use case: Faster processing and lower battery drain for mobile multi-view reconstruction apps by using pose priors from device tracking to constrain matching.
- Tools/workflows:
- Integration as a library in Android/iOS apps; adaptive ε based on device motion/lighting changes.
- Assumptions/dependencies:
- App’s tracker provides usable pose; if not, fall back to coarse matching then enable guided mode.
Long-Term Applications
These opportunities require further research, scaling, integration with learned models, or hardware development.
- Hybrid learned-matchers with geometric pruning (Sector: software, AI)
- Idea: Use the angular-interval filter to prune attention graphs in transformer-based matchers (e.g., SuperGlue, LoFTR), reducing tokens/edges and compute without sacrificing accuracy.
- Potential products:
- Geometry-aware learned matchers with dynamic ε per keypoint predicted by a network.
- Dependencies/risks:
- Need careful training to avoid over-pruning; may require a differentiable angular filter for end-to-end learning.
- Dense and semi-dense epipolar-guided matching (Sector: stereo, robotics, medical imaging)
- Idea: Extend angular interval queries to accelerate semi-dense/dense stereo by preselecting candidate pixels along epipolar envelopes in unrectified settings (e.g., stereo endoscopes, micro-cameras).
- Potential products:
- Fast unrectified stereo modules for constrained rigs; accelerated depth for small-baseline cameras.
- Dependencies/risks:
- Sparse method must be adapted for dense queries (memory/layout considerations); must handle radiometric changes and occlusions.
- Hardware acceleration and ISP/SoC integration (Sector: semiconductors, mobile)
- Idea: Implement angular interval queries (angle computation, interval splitting, segment-tree lookups) in vision accelerators/ISPs for real-time, low-power matching on mobile/AR glasses and drones.
- Potential products:
- On-chip “guided matching” IP blocks; vectorized kernels using SIMD/GPU for building/querying intervals.
- Dependencies/risks:
- Requires stable API and consistent camera metadata; hardware must support dynamic ε and wrap-around intervals; ROI updates per frame.
- Large-scale multi-view indexing for SfM and mapping (Sector: geospatial, surveying)
- Idea: Build global, epipole-centric interval indices across many images to quickly find cross-view correspondences in massive datasets (city-scale captures) once a coarse pose-graph exists.
- Potential products:
- Cluster-wise guided matching services in cloud photogrammetry; faster incremental SfM updates.
- Dependencies/risks:
- Memory/IO challenges; need robust handling of pose drift and loop-closure updates.
- Event cameras and high-speed vision (Sector: robotics, research)
- Idea: Combine precise epipolar envelopes with asynchronous event data for rapid candidate gating at very high frame rates or low light.
- Potential products:
- Epipolar-guided event matching modules for agile drones or high-speed manipulators.
- Dependencies/risks:
- Requires pose estimates at event timescales; handling rolling shutter and motion blur is nontrivial.
- Privacy- and energy-aware on-device mapping (Sector: policy, consumer devices)
- Idea: Reduce cloud dependence by making on-device mapping feasible (lower compute/energy per match), supporting privacy-by-design for AR and home robots.
- Potential products:
- Vendor guidelines and SDKs that standardize geometry-guided matching; power-saving modes in mapping apps.
- Dependencies/risks:
- Must demonstrate consistent energy savings across devices; need consistent availability of pose priors.
- Robustness in dynamic, non-rigid scenes (Sector: robotics, smart cities)
- Idea: Integrate motion segmentation to vary ε per region and maintain benefits when epipolar constraints are violated locally by moving objects.
- Potential products:
- Scene-adaptive guided matching front-ends for outdoor robots and autonomous vehicles.
- Dependencies/risks:
- Requires reliable motion segmentation or flow; incorrect segmentation can over-prune and miss inliers.
- Standardization and metadata for capture systems (Sector: standards, UAS/drone mapping)
- Idea: Promote inclusion of camera extrinsics/pose uncertainty metadata in image headers to enable immediate guided matching in third-party software.
- Potential products:
- Best-practice specifications for drone and body-worn cameras; export flags for ε suggestions based on pose covariance.
- Dependencies/risks:
- Industry adoption; balancing metadata richness with storage and privacy.
Notes on Feasibility and Dependencies
- Geometry availability: The method requires a fundamental matrix or relative pose; in bootstrapping phases, start with larger ε or unguided matching, then switch to guided mode once a pose is available.
- Calibration quality: Undistortion and consistent intrinsics are important. Rolling-shutter and lens distortion introduce geometric deviations—compensate via preprocessing or larger ε.
- Epsilon selection: ε must reflect combined sources of error (detector noise, pose/cali uncertainty, discretization). Per-keypoint ε (supported by the method) is ideal when uncertainty varies across the image.
- Epipole configurations: When the epipole lies inside or near the image, many intervals become wide, increasing k and reducing speedup; still correct, but with diminished gains.
- Descriptor compatibility: Works with classical (SIFT, ORB) and learned descriptors; GMS or adaptive ratio tests remain compatible and often beneficial under reduced candidate sets.
- Complexity and resources: Building the segment tree is O(n log n) per target image and pays off when querying many source points; memory overhead is modest (up to ~2n intervals with boundary splits).
These applications and considerations map the paper’s exact, logarithmic-time angular filtering into concrete gains in latency, robustness, and energy consumption across many vision systems that can supply or estimate inter-frame geometry.
Glossary
- Adaptive Lowe ratio: A variant of the SNN ratio test that adapts the threshold based on the size of the candidate pool to maintain consistent filtering. "adaptive Lowe ratio"
- AGAST: A high-speed corner detector (Adaptive and Generic Accelerated Segment Test) used for feature detection. "AGAST"
- Angular bins: Discrete angular partitions (w.r.t. an epipole) used to group features for epipolar-guided candidate lookup. "angular bins"
- Angular interval: The span of directions from the epipole that intersect a keypoint’s tolerance circle, defining valid epipolar line orientations for matching. "defines an angular interval"
- Angular query: A search over angles (rather than image space) to retrieve keypoints whose angular intervals include a given epipolar line direction. "casting candidate search as a fast angular query"
- Approximate Nearest Neighbor (ANN): Algorithms that accelerate nearest neighbor searches in high-dimensional descriptor spaces by allowing small errors. "Approximate Nearest Neighbor (ANN) methods like FLANN"
- Centered segment tree: A segment-tree variant built around a chosen center (split angle) to support efficient interval containment queries on a circular angle domain. "We use a centered segment tree"
- Epipolar constraint: The condition that corresponding points and camera centers lie on an epipolar plane, enforcing a bilinear relation between image points via the fundamental matrix. "The fundamental matrix enforces the epipolar constraint:"
- Epipolar envelope: A narrow band around an epipolar line (with pixel tolerance ε) within which candidate correspondences are considered. "epipolar envelope"
- Epipolar geometry: The projective relationship induced by two views of a scene, relating points via epipoles, epipolar lines, and the fundamental matrix. "encodes the epipolar geometry"
- Epipolar Hashing: A candidate retrieval method that bins keypoints by epipolar line orientation for constant-time lookup. "Epipolar Hashing"
- Epipolar line: For a point in one image, the corresponding line in the other image where its match must lie under perfect geometry. "epipolar line"
- Epipolar-guided matching: Matching that uses known geometry (e.g., fundamental matrix) to constrain search around epipolar lines. "epipolar-guided matching"
- Epipole: The projection of one camera center into the other camera’s image; all epipolar lines intersect at the epipole. "epipole"
- Essential matrix: A matrix encoding relative rotation and translation between calibrated cameras, related to the fundamental matrix. "fundamental or essential matrix"
- ETH3D dataset: A multi-view dataset with high-resolution imagery and ground-truth poses used for evaluation. "ETH3D dataset"
- FLANN: The Fast Library for Approximate Nearest Neighbors, used to accelerate descriptor matching. "FLANN"
- Fundamental matrix: A rank-2 matrix that encapsulates epipolar geometry between two views, mapping points to their corresponding epipolar lines. "fundamental matrix"
- Gaussian Splatting: An implicit scene representation approach using 3D Gaussians for rendering and reconstruction. "Gaussian Splatting"
- GMS: Grid-based Motion Statistics, a geometric verification technique enforcing local motion consistency among matches. "GMS"
- Grid-Guided Matching: A geometry-guided method that retrieves nearby keypoints using a spatial grid along epipolar lines. "Grid-Guided Matching"
- Ground-truth correspondences: Verified true matches (often derived from 3D scans and poses) used to assess accuracy. "ground-truth correspondences"
- Homogeneous coordinates: 3D vector form of 2D points (x, y, 1) enabling linear projective transformations. "homogeneous coordinates"
- Intrinsic calibration matrices: Camera matrices (K) containing internal parameters like focal length and principal point. "intrinsic calibration matrices"
- Locality-Sensitive Hashing (LSH): A hashing technique that increases the chance of similar descriptors colliding, speeding up nearest-neighbor search. "LSH for binary descriptors"
- LoFTR: A learning-based detector-free matcher using transformers for dense feature matching. "LoFTR"
- Lowe's ratio test: A heuristic that accepts a match if the best descriptor distance is sufficiently smaller than the second-best, reducing ambiguities. "Lowe's ratio test"
- Optimal transport: A global assignment framework that pairs features by minimizing an overall cost under assignment constraints. "optimal transport"
- Product Quantization: A vector quantization technique that compresses descriptors into compact codes for fast distance approximations. "Product Quantization"
- RANSAC: A robust estimator that fits models (e.g., fundamental matrix) by iteratively sampling and scoring inliers. "RANSAC"
- Rectified stereo vision: A setup where images are reprojected so corresponding points share the same row, reducing matching to 1D. "rectified stereo vision"
- Relative pose: The rotation and translation between two camera viewpoints. "known relative pose"
- Sampson distance: A first-order approximation of geometric reprojection error used to evaluate epipolar consistency. "Sampson distance"
- Scanline matching: One-dimensional matching along image rows in rectified stereo setups. "scanline matching"
- Segment tree: A data structure for storing intervals to support fast point-in-interval queries (here, angles), typically in O(log n + k). "with a segment tree"
- SIFT: Scale-Invariant Feature Transform, a classic detector/descriptor for keypoints. "SIFT"
- Skew-symmetric matrix: A matrix [t]× encoding the cross product with a vector t, used in formulating epipolar constraints. "skew-symmetric matrix"
- SLAM: Simultaneous Localization and Mapping, estimating trajectory and map from sensor data. "Simultaneous Localization and Mapping (SLAM)"
- Structure-from-Motion (SfM): Reconstructing 3D structure and camera motion from images. "Structure-from-Motion (SfM)"
- SuperGlue: A learned matcher using graph neural networks/attention to find correspondences. "SuperGlue"
- SURF: Speeded-Up Robust Features, a fast alternative to SIFT for detection/description. "SURF"
- Tolerance circle: A circle around a keypoint with radius equal to pixel tolerance ε; an epipolar line intersecting it indicates candidacy. "tolerance circle"
- Wide-baseline: Camera configurations with large viewpoint changes, leading to challenging matching conditions. "wide-baseline views"
Collections
Sign up for free to add this paper to one or more collections.