- The paper introduces a rigorous Koopman resolvent-based formulation that generalizes classic LTI frequency response techniques to nonlinear systems using spectral operator theory.
- It derives frequency response coefficients via residue calculations at harmonic poles, validated with analytical and numerical examples on 1D and 2D systems.
- The methodology bridges theory and practice by enabling Bode plot visualization and providing a framework for advanced nonlinear control synthesis and analysis.
Introduction and Motivation
The paper "On Koopman Resolvents and Frequency Response of Nonlinear Systems" (2603.05771) establishes a rigorous frequency-domain methodology for nonlinear systems analysis by leveraging resolvent theory associated with the Koopman operator. Classical frequency response techniques for LTI systems have proven invaluable in control synthesis and analysis, relying on spectral representations that yield Bode plots for gain and phase characterization. However, approaches to nonlinear frequency response—such as harmonic balance, Volterra series, and describing functions—have traditionally emphasized time-domain or state-space formulations, lacking a unified frequency-domain treatment.
This work generalizes classical frequency-domain analysis to nonlinear systems through the Laplace transform of system outputs, structured by the resolvent operator of the Koopman generator. The resulting frequency response is a complex-valued function of driving angular frequency, supporting classical visualization tools (Bode plots) and extending theoretical understanding to nonlinear dynamics.
Koopman Operator Theory and Resolvent Construction
The paper formalizes the nonlinear plant as a continuous-time system:
x˙=F(x,u),y=g(x,u)
where F is a nonlinear vector field and g is an observable function. The Koopman operator Kt acts linearly on the space of observables despite the nonlinear state evolution, enabling spectral analysis analogous to LTI systems but in infinite-dimensional settings.
The infinitesimal generator L of the Koopman semigroup is derived as:
Lf(x)=F(x)⋅∇xf(x)
The central object is the Koopman resolvent:
R(s;L)=(sI−L)−1,s∈ρ(L)
where ρ(L) denotes the resolvent set. The paper rigorously defines spectral properties—point, continuous, and residual spectra—using operator-theoretic language, ensuring that eigenstructure can be exploited for frequency response calculations.
For a nonlinear plant forced by a single-frequency input u(t)=u0eiωt, a skew-product formalism is adopted, embedding u as an additional state variable:
x˙=F(x,u),u˙=iωu,y=g(x,u)
The generator Lforced and its resolvent R(s;Lforced) are constructed for this autonomous augmented system. The Laplace transform of the system output—central to frequency analysis—is then obtained through Koopman resolvent action:
y^(s;x0,u0)=[R(s;Lforced)g](x0,u0)
Key formal result: The frequency response at harmonics (nω) and subharmonics (ω/n) is rigorously derived via projection onto the relevant Koopman eigenfunctions, yielding:
Hn(ω;g)=u0−n∮∣s−inω∣=ε[R(s;Lforced)g](x0,u0)2πids
or equivalently, by taking residues at the poles associated with the eigenvalues inω. The frequency response coefficients, Hn and H1/n, quantitatively capture the amplitude and phase of steady-state periodic output components, mirroring classic LTI frequency response definitions.
The formulation is shown mathematically to generalize LTI frequency response constructions and make precise, through operator theory, the connection between nonlinear system responses and their spectral content.
Numerical and Analytical Examples
The paper provides analytical solutions for:
- 1D linear systems: Shows explicit recovery of the classical transfer function as the Koopman mode, validating the approach.
- 2D nonlinear systems: Demonstrates emergence of higher-order harmonics in output (e.g., only 2ω appears in x1 for quadratic interconnections) and computes Bode plots from derived frequency responses.
The visualization of these frequency responses is encapsulated in Bode plots for gain and phase:
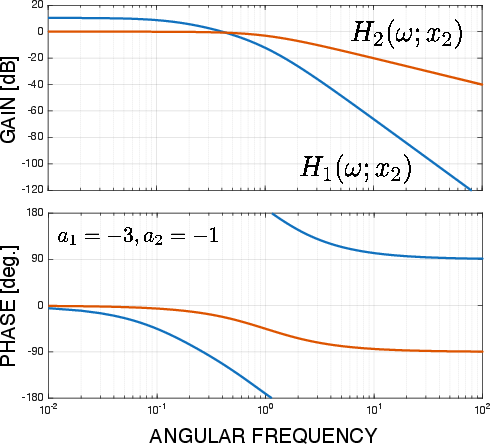
Figure 1: Bode plots for frequency responses of the 2d nonlinear example: blue for H1(ω;x2) and orange for H2(ω;x1).
This figure illustrates the frequency-selective nature of nonlinear dynamics, where harmonic components are induced by nonlinearities and their frequency response is filtered by the system.
Spectral Conditions and Applicability
Sufficient conditions for existence and computability of frequency response are rigorously discussed:
- LTI systems: The framework reduces to standard transfer function analysis, with isolated simple eigenvalues ensuring residue computation.
- Globally stable nonlinear systems: Analyticity and existence of globally attracting periodic solutions guarantee the presence of isolated poles for the Koopman resolvent.
- Ergodic dynamics: For systems with compact attractors and ergodic dynamics (including chaos), spectral expansion in L2 is possible, and frequency response can be projected onto eigenfunctions associated with relevant frequencies.
The methodology excludes cases with non-periodic attractors (e.g., quasi-periodic or chaotic responses not aligned with input frequency), and special attention is given to bifurcation phenomena and resonance conditions.
Theoretical and Practical Implications
The resolvent-based construction bridges classical control theory and modern operator-theoretic approaches, providing:
- Systematic frequency-domain analysis for nonlinear systems, beyond phenomenological or approximate methods.
- Rigorous definitions and computable metrics for frequency response, enabling Bode plot visualization and analysis.
- A foundation for input-output analysis and future development of nonlinear transfer functions.
- The potential for numerical estimation of frequency responses and modes via dynamic mode decomposition, facilitating data-driven analysis.
The framework paves the way for practical synthesis tools in nonlinear control, such as stability and passivity analysis, and theoretical explorations into spectral properties of nonlinear dynamical systems.
Conclusion
The paper introduces a mathematically principled frequency-domain analysis of nonlinear systems using the Koopman resolvent, generalizing classical tools to encompass nonlinear phenomena. Strong theoretical results establish the connection between steady-state responses, spectral operator theory, and frequency response quantification. The practical outcome is a universal method for constructing Bode plots, analyzing nonlinear systems, and defining transfer-like input-output relations. Future research directions include well-posedness and differentiability of frequency responses, advanced nonlinear synthesis methodologies, and exploration of spectral expansions for broader classes of dynamical systems.