TIDI-GS: Floater Suppression in 3D Gaussian Splatting for Enhanced Indoor Scene Fidelity
Abstract: 3D Gaussian Splatting (3DGS) is a technique to create high-quality, real-time 3D scenes from images. This method often produces visual artifacts known as floaters--nearly transparent, disconnected elements that drift in space away from the actual surface. This geometric inaccuracy undermines the reliability of these models for practical applications, which is critical. To address this issue, we introduce TIDI-GS, a new training framework designed to eliminate these floaters. A key benefit of our approach is that it functions as a lightweight plugin for the standard 3DGS pipeline, requiring no major architectural changes and adding minimal overhead to the training process. The core of our method is a floater pruning algorithm--TIDI--that identifies and removes floaters based on several criteria: their consistency across multiple viewpoints, their spatial relationship to other elements, and an importance score learned during training. The framework includes a mechanism to preserve fine details, ensuring that important high-frequency elements are not mistakenly removed. This targeted cleanup is supported by a monocular depth-based loss function that helps improve the overall geometric structure of the scene. Our experiments demonstrate that TIDI-GS improves both the perceptual quality and geometric integrity of reconstructions, transforming them into robust digital assets, suitable for high-fidelity applications.

Paper Prompts
Sign up for free to create and run prompts on this paper using GPT-5.
Top Community Prompts
Explain it Like I'm 14
What is this paper about?
This paper looks at a fast way to build 3D scenes from regular photos called 3D Gaussian Splatting (3DGS). While 3DGS can make realistic scenes you can move around in, it often creates “floaters”—tiny, see‑through bits that hover in the wrong places, especially indoors. These floaters make the 3D scene less accurate and less useful. The authors propose TIDI-GS, a training add‑on that finds and removes floaters without breaking important details, so indoor scenes look cleaner and more trustworthy.
What questions are the researchers trying to answer?
- How can we stop 3DGS from creating floaters in indoor scenes without slowing it down or making the system much more complicated?
- How can we tell the difference between true, thin details (like wires or shiny highlights) and fake floaters that should be removed?
- Can we use simple depth hints from single images to help 3DGS build better geometry?
How did they do it?
To understand the approach, here are some simple explanations of key ideas:
What is 3D Gaussian Splatting (3DGS)?
Imagine a 3D scene built from millions of tiny, soft blobs (like small translucent jellybeans). Each blob has a position, size, and color. When you look at the scene from a camera, the system blends these blobs to create the final image. Because everything is adjustable, the system learns where blobs should be and how they should look to match the training photos.
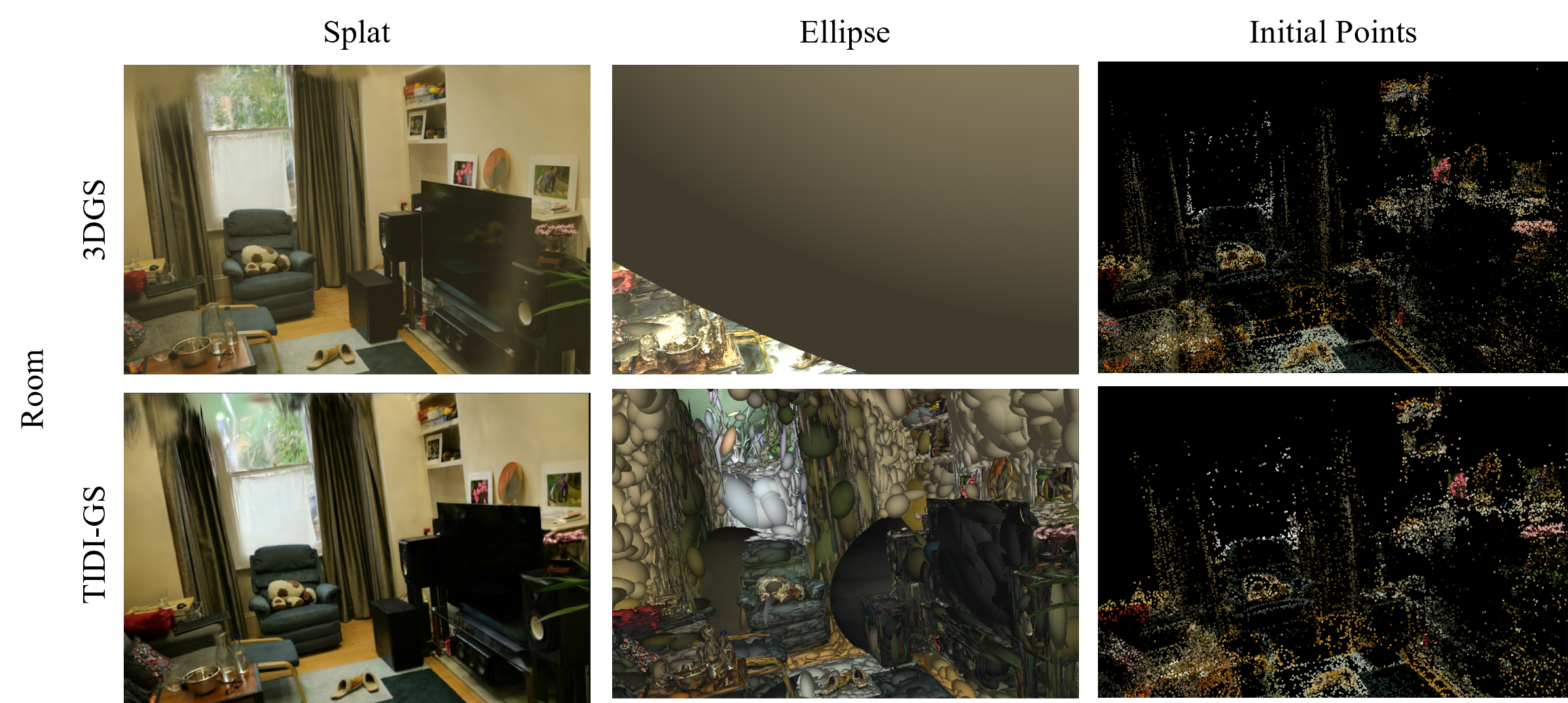
The problem: “floaters”
Floaters are blobs that don’t belong to any real surface. They pop up in the air to “explain” tricky lighting or reflections, especially indoors where walls are plain, lights are bright, and floors can be shiny. Floaters look like faint dust or mist and can mess up edges and depth.
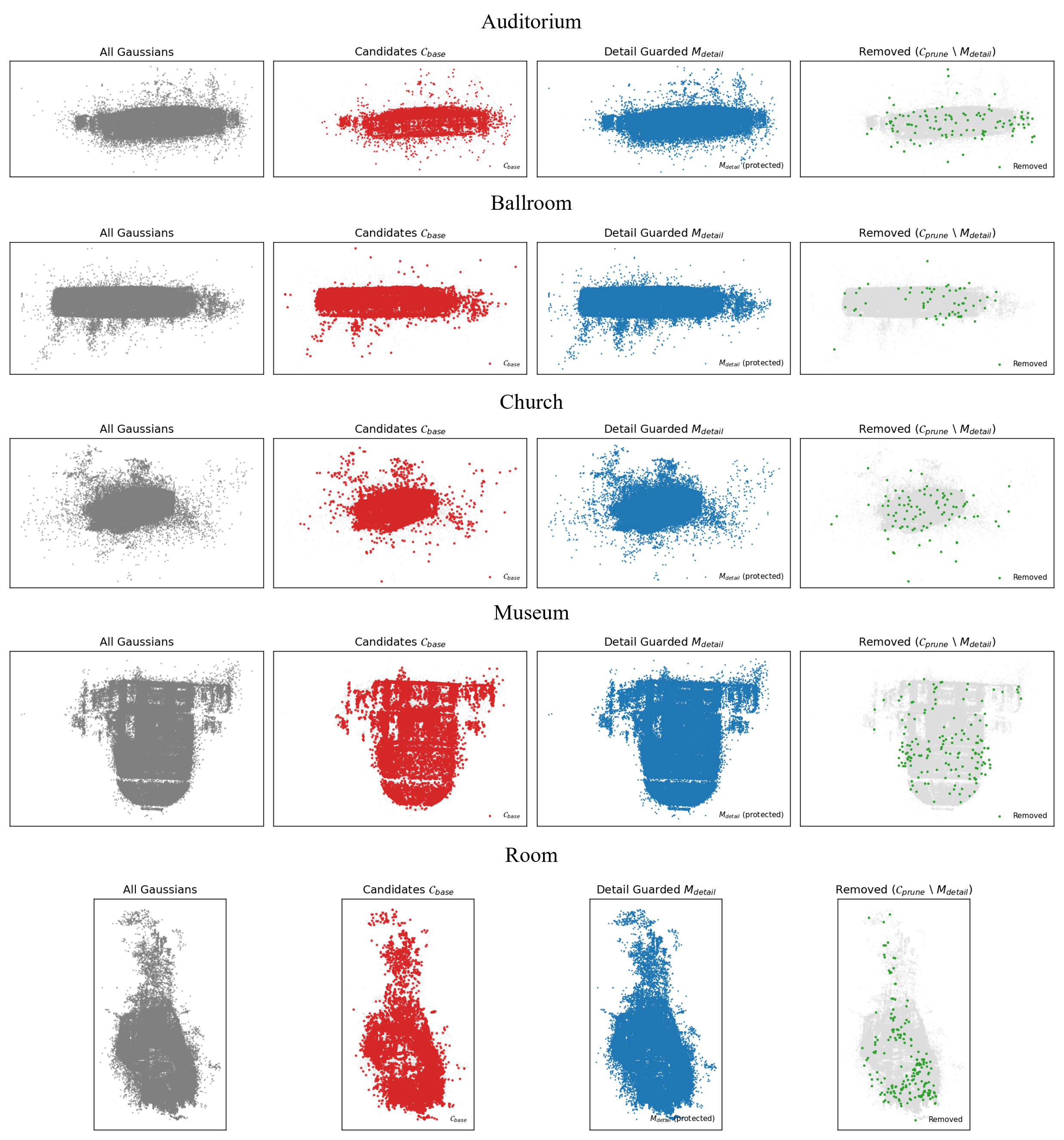
The solution: TIDI-GS
TIDI-GS adds two lightweight steps to standard 3DGS training:
- A smart cleanup pass (pruning) that runs regularly:
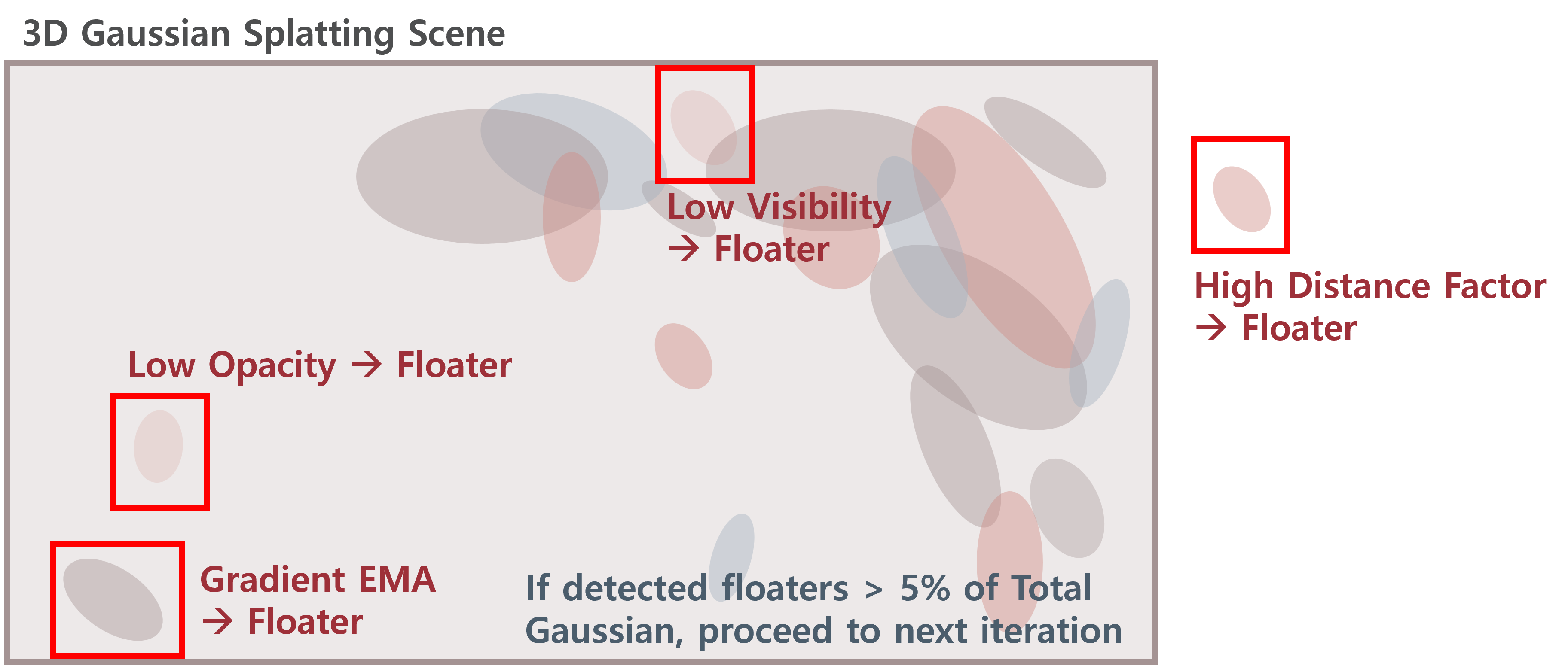
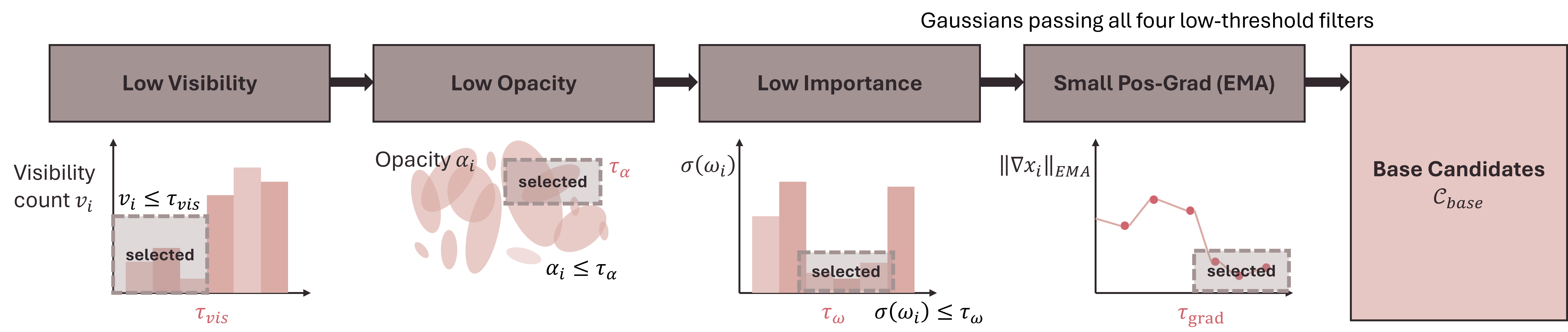
- It gathers “evidence” over time for each blob. Think of it like keeping a scorecard:
- Does this blob show up consistently from different camera views?
- Is the optimizer still “trying” to move it (does it get meaningful updates)?
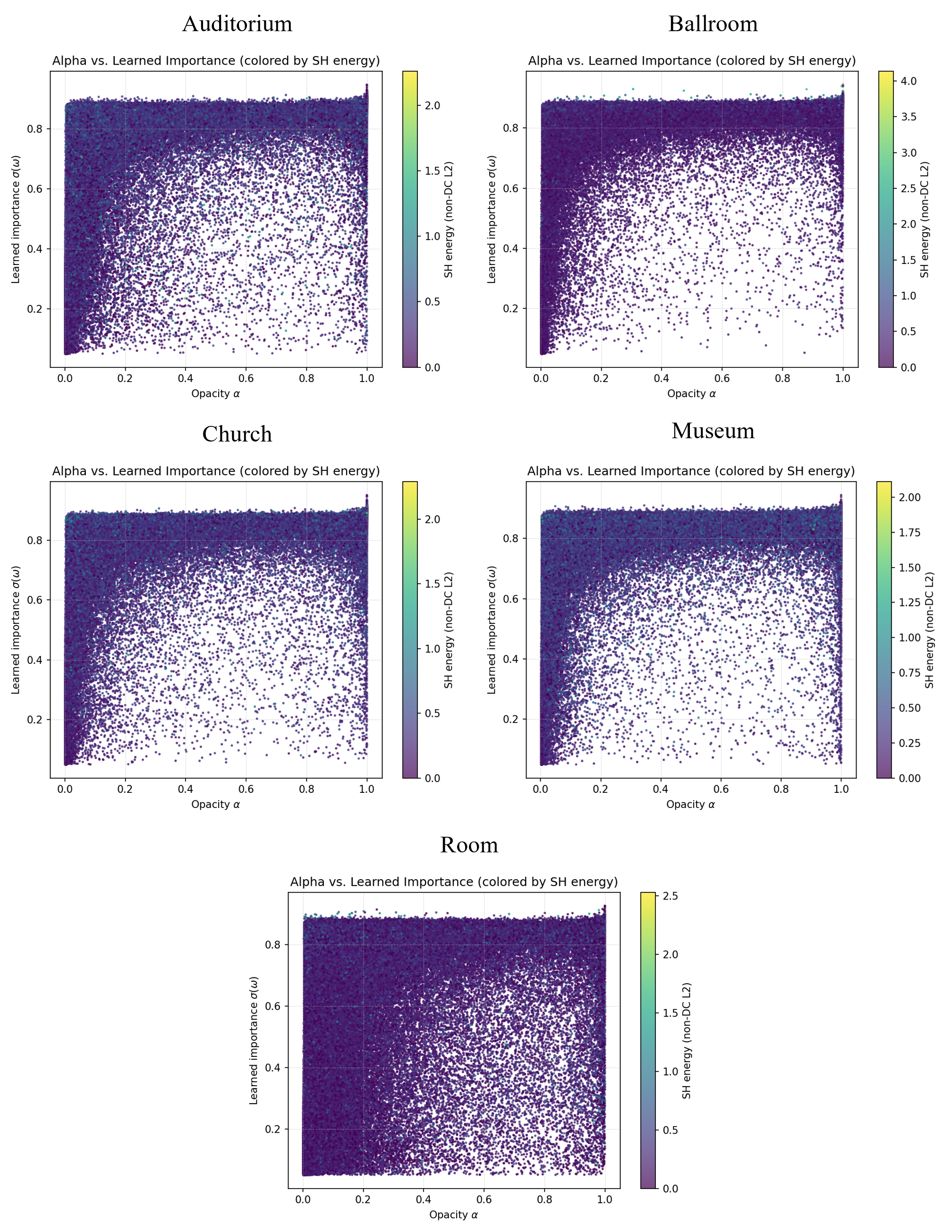
- How important is it, according to a learnable importance score?
- Is it very see‑through (low opacity)?
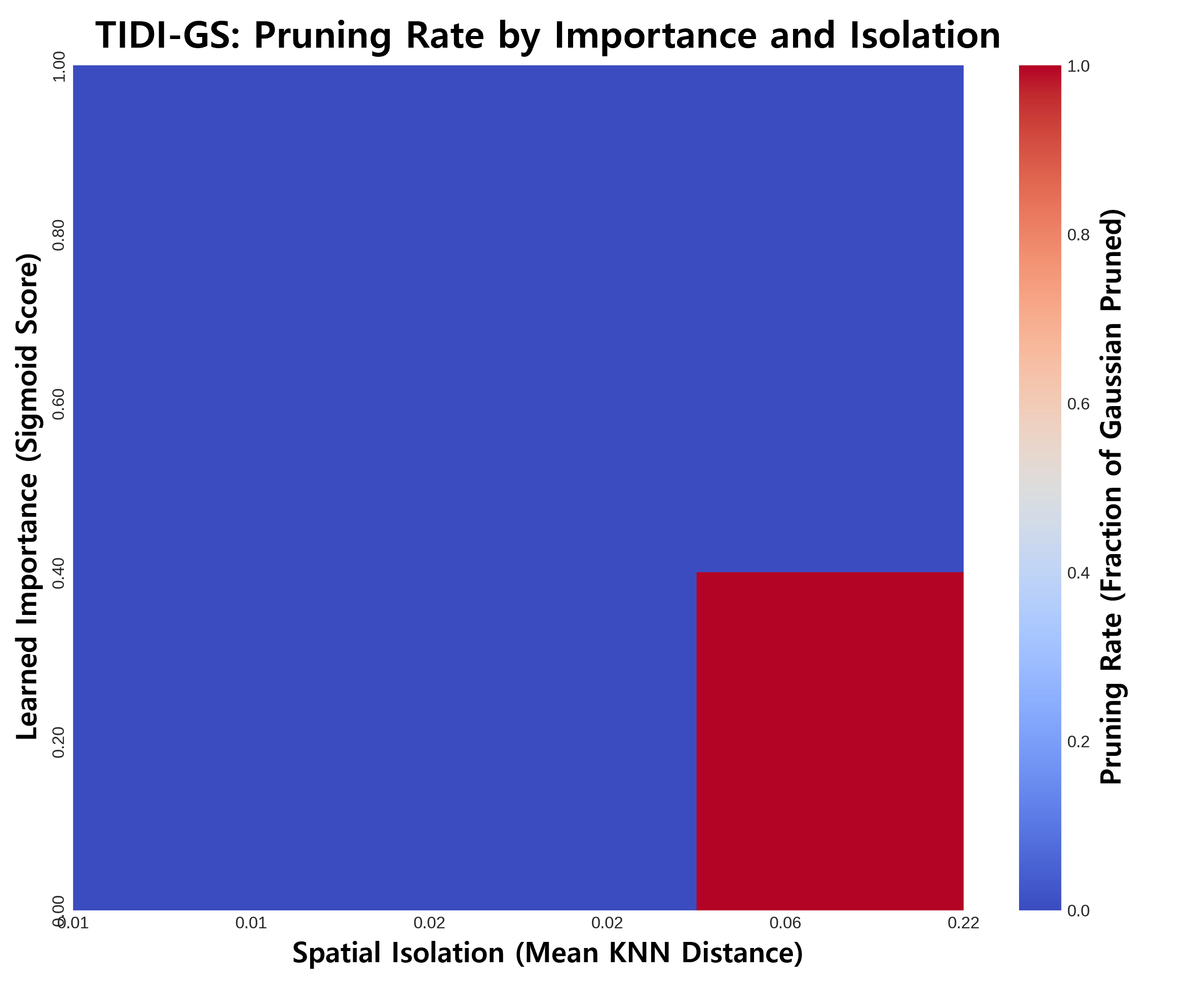
- Is it isolated in space (far from other blobs that form a surface)?
- If a blob looks suspicious on multiple counts, it becomes a pruning candidate.
- It gathers “evidence” over time for each blob. Think of it like keeping a scorecard:
- Detail-preserving guards:
- Before removing anything, guards check if a blob is part of real, fine details. For example:
- Does it carry high‑frequency color changes (like shiny highlights that change with view)?
- Is it part of a thin or flat structure (like a wire or edge)?
- If yes, the blob is protected and not removed.
- Before removing anything, guards check if a blob is part of real, fine details. For example:
The actual removal focuses on blobs that are both isolated and unimportant. There’s also a cap so it doesn’t delete too many at once, keeping training stable.
Using depth hints from single images
The method also uses “monocular depth,” which is a rough guess of how far things are from the camera using only one image (no special sensors). Since this depth can be imperfect, TIDI-GS:
- Aligns the guessed depth to match the scene’s scale and position.
- Trusts the depth more in areas where it’s likely correct and less where it’s unreliable (like shiny or glass surfaces).
- Uses a gentle loss (a robust error measure) so big mistakes don’t cause chaos.
This “soft guidance” helps the system avoid placing blobs in empty space in the first place.
What did they find, and why does it matter?
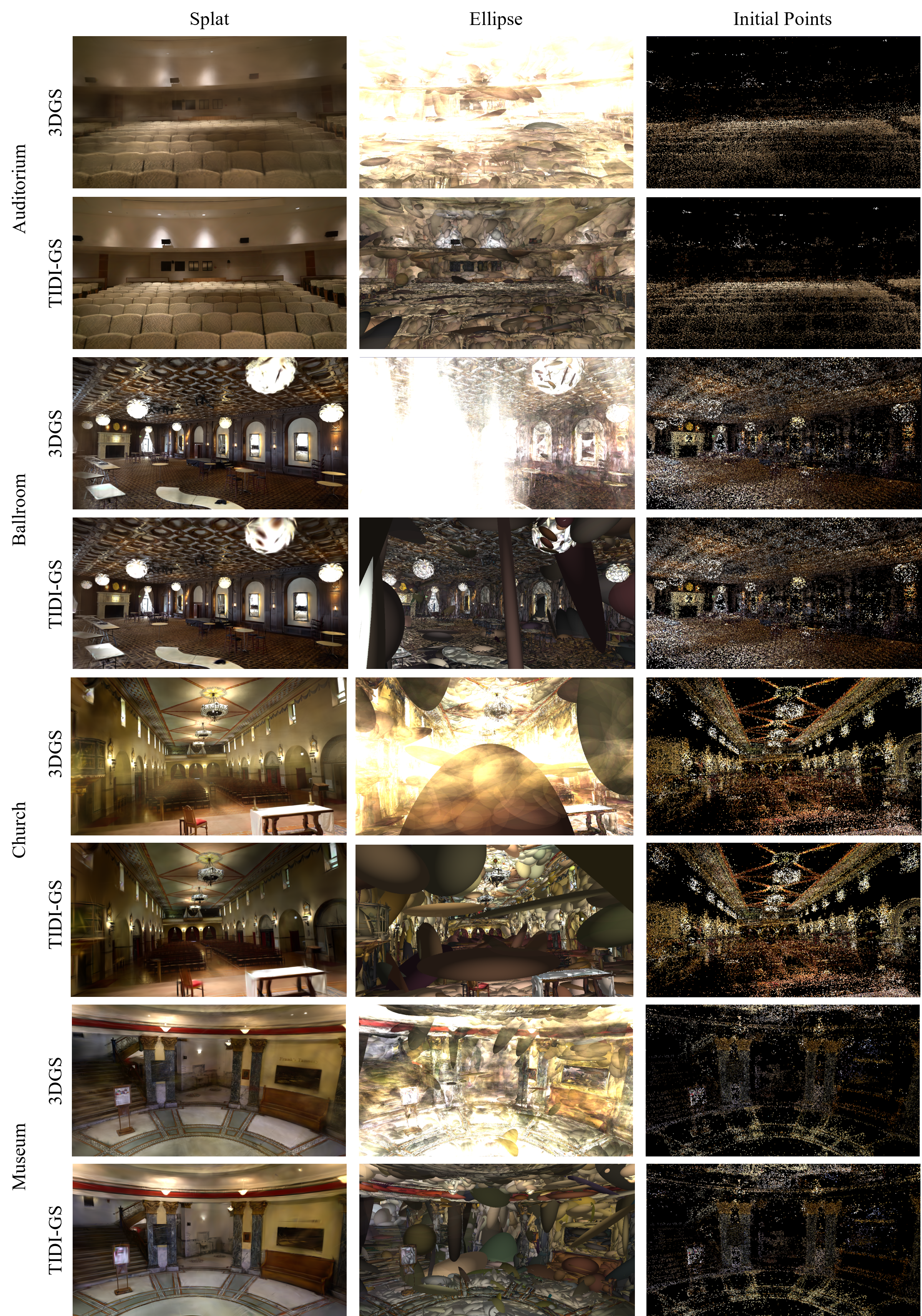
- Cleaner indoor scenes: TIDI-GS removes floaters, haze, and free‑space clutter while keeping thin wires, edges, and shiny highlights.
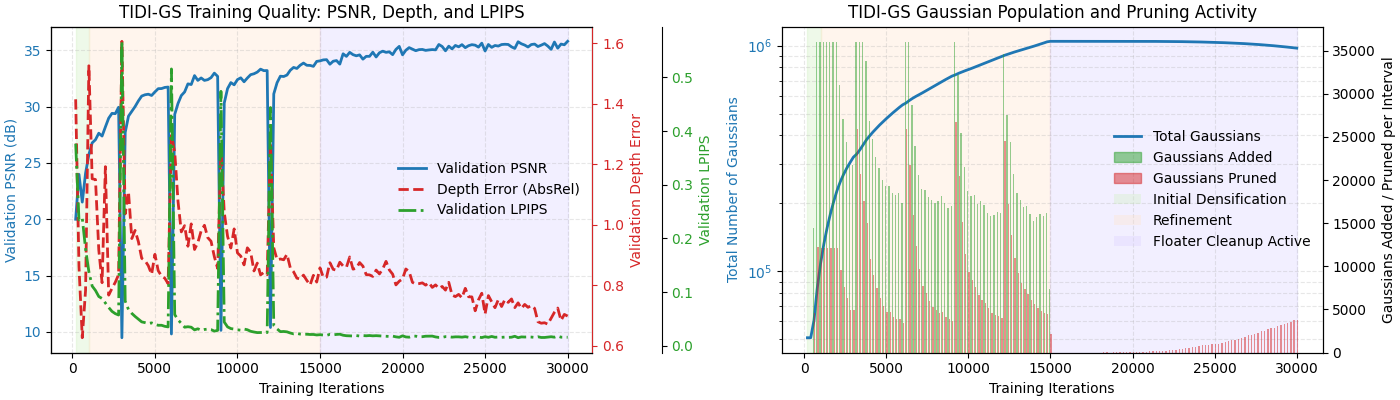
- Better geometry: Edges look sharper, silhouettes are cleaner, and depth stays stable when the camera moves.
- Strong metrics: Compared to standard 3DGS and other advanced methods, TIDI-GS improves image quality scores (like PSNR, SSIM, LPIPS) and special stability measures (like silhouette leakage and background consistency).
- Minimal overhead: It works as a plugin—no big architectural changes and only a small time cost added to training.
- Robust across scenes: It performed well on several challenging indoor datasets (like Tanks and Temples and Mip‑NeRF 360), which are known to cause floaters.
Why it’s important: In practical uses—like virtual tours, robotics, inspection, and AR/VR—incorrect geometry can cause bad decisions or glitches. By reducing floaters and stabilizing depth, TIDI-GS turns 3DGS results into more reliable “digital assets.”
What’s the bigger impact?
TIDI-GS shows you don’t need a heavy, complex redesign to fix a big problem in 3DGS. With smart, evidence‑based cleanup and gentle depth guidance, 3D scenes can be both realistic and structurally correct. This can help:
- Make indoor 3D models safer for tasks like measuring distances or checking clearances.
- Improve user experience in AR/VR by preventing visual flicker and weird floating artifacts.
- Speed up adoption of real‑time 3D reconstruction tools in everyday applications, since the method is easy to plug in and doesn’t slow things down much.
In short, TIDI-GS helps turn fast, photorealistic 3D into trustworthy 3D—especially in tricky indoor environments.
Knowledge Gaps
Knowledge gaps, limitations, and open questions
The paper leaves several aspects unresolved; future work should address the following:
- Generalization beyond indoor static scenes: Validate TIDI-GS on outdoor, highly cluttered, and dynamic scenes (moving objects, time-varying illumination) to test domain robustness and failure modes.
- Reliance on monocular depth priors: Quantify sensitivity to different depth estimators (MiDaS, Depth Anything, others), and ablate their contributions; evaluate performance when priors are biased or fail (mirrors, glass, transparent/reflective materials).
- Multi-view consistency of depth alignment: The per-view scale/shift alignment (
s,t) risks cross-view inconsistency; investigate joint or global alignment strategies and constraints to enforce multi-view coherence. - Uncertainty weighting design for depth loss: Specify and compare methods to compute
w_uncert(e.g., flip-consistency variance, heteroscedastic aleatoric models, ensemble variance), and quantify their impact on geometry and artifact suppression. - Explicit composite pruning score: Define the exact weighting/formula combining isolation, opacity, learned importance, and visibility into the ranking score; ablate weightings and study sensitivity to each term.
- Thresholds and schedules: Develop principled or automated threshold selection and cleanup cadence (e.g., Bayesian or reinforcement learning-based policies) instead of fixed
τ_vis,τ_grad,τ_α,τ_ω, and 400-step intervals; quantify stability across scene scales and densities. - Occlusion-awareness: Prevent over-pruning of legitimately occluded or rarely visible structures; incorporate occlusion reasoning (e.g., multi-view visibility modeling, frustum occupancy, per-ray support) and evaluate false positives on occluded geometry.
- Isolation metric and neighborhood modeling: Replace Euclidean
k-NN distance with anisotropy-aware metrics (covariance-informed distances), graph connectivity, or manifold clustering; test adaptivekbased on local density. - Detail-preserving guards validation: Systematically quantify guard efficacy (non-DC SH energy, color variance, thinness/anisotropy) on thin structures (wires, edges) versus specular artifacts; report false positive/negative rates and calibration procedures for guard thresholds.
- Learned importance parameter
ω_i: Analyze its distribution, regularization (e.g., L1/L2, entropy), potential degeneracies (trivial all-high importance), and its interaction with gradient flow and loss minimization; ablate with/withoutω_i. - Runtime and memory footprint: Measure inference FPS, GPU memory usage, and per-Gaussian overhead from evidence logs and guards; assess scalability to very large scenes (tens of millions of Gaussians) and resource-constrained devices.
- Pose robustness: Evaluate sensitivity to camera pose errors and COLMAP failures; test with noisy/inaccurate poses and propose pose-robust pruning or joint pose refinement to mitigate floater formation.
- Standardized floater metrics: Introduce and report quantitative, reproducible floater-specific metrics (e.g., floater count, free-space occupancy, transmittance leakage) alongside silhouette leakage, depth stability, and background consistency; release code for metric computation.
- Geometric ground truth evaluation: Beyond image metrics, include geometry-centric benchmarks (e.g., surface-to-surface error against LiDAR/MVS meshes, normal consistency, plane fit residuals) to substantiate “inspection-grade” claims.
- Integration with other priors/sensors: Explore fusing MVS, stereo, ToF, or LiDAR priors, and compare their effect against monocular priors; study multi-prior conflict resolution and uncertainty fusion.
- Curriculum details for depth loss: Specify and ablate the schedule (ramp-up timing, maximum weight, interaction with photometric loss) to prevent early misguidance and quantify training stability improvements.
- Densification–pruning interplay: Analyze how periodic pruning affects densification spawn rates, spatial distribution, and convergence; consider adaptive densification policies informed by evidence logs.
- Handling specular highlights vs geometry: The guard that preserves high SH energy at low opacity may keep view-dependent appearance proxies; investigate separating reflectance modeling from geometry to avoid preserving non-physical floaters.
- Transparent/volumetric media: Extend the framework to handle glass, translucency, and volumetric effects (smoke, fog) where conventional visibility and depth priors are unreliable; evaluate specialized guards or priors for these materials.
- Reproducibility details: Clarify key implementation choices (definition of “non-trivial contribution” to visibility, cell definition for local caps, neighbor search scale, optimization method for
s,t) and release code/datasets to ensure replicability. - Adaptive caps and aggressive artifact scenarios: Justify and ablate cap ratios (local 1.0%, global 0.2%); study failure cases where heavier cleanup is needed and devise safeguards against over-pruning.
- Scene resolution and capture variability: Test robustness across different image resolutions, exposure variations, limited parallax, and sparse views; identify minimal capture requirements for reliable floater suppression.
- Plugin compatibility: Empirically validate plug-in integration with advanced 3DGS variants (e.g., Pixel-GS, LP-GS, Micro-Splatting) in joint training, not just as baselines; identify conflicts and required adaptations.
- Downstream task impact: Evaluate effects on downstream applications (surface extraction, meshing, measurement accuracy, occlusion reasoning, segmentation) to substantiate practical benefits in inspection-grade workflows.
Practical Applications
Practical Applications of TIDI-GS
Below is a structured mapping of real-world applications that follow from the paper’s findings and innovations in floater suppression for 3D Gaussian Splatting (3DGS). Each application is categorized by deployment horizon and linked to relevant sectors, with notes on feasible tools/workflows and assumptions or dependencies that affect adoption.
Immediate Applications
These applications can be deployed now using the paper’s plugin-style framework (TIDI-GS) integrated into standard 3DGS pipelines, with modest computational overhead.
- High-fidelity indoor digital twins for facility management and operations (sector: software, construction/BIM)
- Tools/workflows: TIDI-GS plugin integrated into existing 3DGS training repos; capture via DSLR/smartphone, pose estimation via COLMAP; uncertainty-guided monocular depth (MiDaS/DepthAnything) as soft priors; QA steps using silhouette leakage and depth stability metrics to accept/reject assets.
- Use cases: asset inventory, space planning, maintenance routing, compliance documentation.
- Assumptions/dependencies: static scenes; multi-view coverage (≈120–200 high-res images); GPU training (consumer-grade like RTX 4080); accuracy sufficiency for measurement depends on camera calibration and scene coverage; monocular depth scale/shift alignment.
- AR interior design and furniture placement with improved occlusion and depth stability (sector: consumer software, retail)
- Tools/workflows: 3DGS-based AR engines with TIDI cleanup; mobile capture → cloud training → real-time AR overlay with reduced floater-induced occlusion errors.
- Use cases: try-before-you-buy, decor visualization, layout experimentation.
- Assumptions/dependencies: stable lighting or robust uncertainty weighting to handle glossy/reflective surfaces; sufficient viewpoints to avoid thin structure removal; real-time viewer built on tile-based rasterizers.
- Visual inspection and safety audits of indoor environments (sector: industrial inspection, insurance)
- Tools/workflows: inspection-grade reconstructions using TIDI-GS; standardized cleanliness indicators (silhouette leakage, background consistency) embedded in QA pipelines; report generation for claims or compliance checks.
- Use cases: hazard clearance verification (e.g., wiring, piping, door swing envelopes), post-event claims assessment.
- Assumptions/dependencies: acceptance of 3DGS accuracy by stakeholders; known camera intrinsics/extrinsics; careful handling of specular/glass regions where monocular depth is less reliable (mitigated by uncertainty-aware loss).
- Robotics perception for indoor navigation and manipulation (sector: robotics)
- Tools/workflows: map-building via 3DGS with periodic TIDI pruning for cleaner geometry; use in path planning and occlusion-aware grasp planning; integration with RGB captures and existing SLAM for pose initialization.
- Use cases: domestic robots, warehouse AMRs, service robots in offices/hospitals.
- Assumptions/dependencies: primarily static scenes during capture; dynamic objects may require separate handling; tight integration with SLAM needed for robust poses; TIDI cadence tuned for training stability.
- Set digitization for film/TV and game level authoring (sector: media/entertainment, game development)
- Tools/workflows: capture sets and indoor locations; apply TIDI-GS to remove haze/floaters while preserving thin details (wires, truss, edges); export clean Gaussian models or downstream mesh extraction.
- Use cases: virtual production, previsualization, rapid scene prototyping.
- Assumptions/dependencies: pipeline compatibility (PyTorch 3DGS repos), asset conversion tools for downstream DCC applications; manage specular artifacts via guard thresholds.
- Museum and cultural heritage tours with cleaner reconstructions (sector: education, cultural institutions)
- Tools/workflows: public-facing viewers that leverage TIDI-GS-cleaned indoor scans; QA with depth jitter analysis for visitor experience quality.
- Use cases: virtual walkthroughs, remote education programs.
- Assumptions/dependencies: adequate coverage and lighting; viewer hardware constraints; data governance for public exhibits.
- Academic benchmarking and curriculum support in vision/graphics (sector: academia)
- Tools/workflows: standardized evaluation protocols that emphasize geometric stability (silhouette leakage, depth stability under jitter); teaching modules on evidence-aware pruning and uncertainty-weighted supervision; comparative studies vs. NeRF/3DGS baselines.
- Use cases: course labs, reproducible research artifacts, indoor scene benchmarks.
- Assumptions/dependencies: access to datasets (Tanks and Temples, Mip-NeRF 360), monocular depth models; reproducibility on consumer GPUs.
Long-Term Applications
These require further research, scaling, certification, or broader ecosystem integration (e.g., handling dynamic scenes, mobile/on-device training, cross-sensor fusion, standards adoption).
- Building code and accessibility compliance automation (sector: policy, construction/BIM)
- Potential product: “Compliance Twin” that automatically checks ADA clearances, egress paths, fixture placement from TIDI-GS-cleaned reconstructions.
- Needed advances: certified measurement accuracy; integration with BIM metadata; standardized audit workflows and regulatory acceptance; robust handling of transparent/reflective materials.
- Dependencies: policy frameworks recognizing photogrammetric twins; scene-wide scale calibration (beyond monocular scale/shift).
- Hospital and clinical digital twins for operational optimization (sector: healthcare)
- Potential workflows: patient flow and bed management simulations using accurate indoor geometry; spatial analytics for equipment layout and infection control.
- Needed advances: dynamic scene modeling (people, equipment movement), privacy-preserving capture; multi-sensor fusion (RGB + depth/LiDAR) for robustness.
- Dependencies: compliance with HIPAA/PHI; validated geometric fidelity for clinical decision support; domain-specific uncertainty handling.
- Energy-aware facility modeling for HVAC optimization (sector: energy, facility management)
- Potential tools: geometry-informed thermal models linked to clean 3D reconstructions; airflow/heat modeling leveraging accurate occlusion and surface boundaries.
- Needed advances: material property estimation from visuals; coupling with BEM/CFD software; large-scale multi-room capture automation.
- Dependencies: calibrated physical parameters; integration with IoT sensors; scalable training across buildings.
- Real-time, on-device TIDI-GS for consumer AR and robotics (sector: mobile software, robotics)
- Potential product: smartphone app or robot stack performing capture → training → deployment locally; dynamic pruning adapted to live updates.
- Needed advances: model compression and hardware acceleration; streaming densification/pruning; online uncertainty estimation on edge devices.
- Dependencies: efficient rasterization on mobile GPUs/NPUs; battery and thermal constraints; robust pose estimation without COLMAP offline steps.
- E-commerce and retail digital showrooms at scale (sector: retail)
- Potential workflows: fleet capture of store interiors; automated asset cleanup and publishing; continuous updates of product layouts.
- Needed advances: automated view planning; batch training pipelines with quality gates; content management systems for Gaussian assets.
- Dependencies: scalable cloud training; corporate data governance; interoperability with web-based viewers.
- Standards and certification for 3D photogrammetric assets in insurance and real estate (sector: finance/insurance, real estate)
- Potential tools: audit toolkits exposing TIDI-GS cleanliness indicators (e.g., silhouette leakage thresholds) as certifiable quality metrics; standardized reporting.
- Needed advances: consensus metrics and thresholds; third-party validation; legal acceptance for claims appraisals and property listings.
- Dependencies: professional associations and insurers endorsing specs; reproducibility guarantees; audit trails of training parameters.
- Hybrid sensor fusion pipelines (RGB + LiDAR/ToF) for robust indoor reconstructions (sector: software, robotics)
- Potential workflows: use LiDAR to anchor geometry, monocular depth as soft prior, TIDI pruning to enforce manifold consistency; dynamic scene adaptations.
- Needed advances: principled fusion strategies with uncertainty propagation; domain-specific guards for materials (glass, mirrors); event-based updates.
- Dependencies: multi-sensor calibration; synchronization; tooling for uncertainty-aware multi-modal losses.
- Automated mesh extraction and semantic labeling from clean Gaussian assets (sector: software, AEC, robotics)
- Potential tools: meshification of 3DGS with fewer artifacts, semantic segmentation for walls/doors/furniture; downstream CAD/BIM ingestion.
- Needed advances: robust surface extraction from anisotropic Gaussians; joint training for semantics; cross-domain generalization in indoor environments.
- Dependencies: labeled datasets; integration with CAD/BIM standards; compute for semantic post-processing.
- Continuous digital twin updates in dynamic indoor environments (sector: smart buildings, logistics)
- Potential workflows: incremental training with periodic TIDI passes; change detection and versioning of indoor twins; operational dashboards.
- Needed advances: online training stability; temporal consistency measures; handling moving objects without geometry corruption.
- Dependencies: persistent capture infrastructure; data pipelines; policies for historical records and rollbacks.
Notes on common assumptions/dependencies across applications:
- Static-scene assumption: TIDI-GS is optimized for static indoor captures; dynamic scenes require additional modeling.
- Capture and calibration: multi-view imagery with good coverage and accurate pose estimation (e.g., COLMAP or SLAM) are critical.
- Monocular depth priors: guidance quality depends on estimator reliability; uncertainty weighting mitigates but does not eliminate errors on reflective/transparent surfaces.
- Compute and time: training on consumer GPUs (e.g., RTX 4080) runs in tens of minutes per scene; on-device or large-scale deployments need optimization and scheduling.
- Fidelity and measurement accuracy: policy-critical or safety-critical uses may require validation, standardization, and certification beyond current academic benchmarks.
Glossary
- 3D Gaussian Splatting (3DGS): A real-time point-based scene representation and rendering technique that models scenes with many 3D Gaussians. "3D Gaussian Splatting (3DGS) is a technique to create high-quality, real-time 3D scenes from images."
- Anisotropic Gaussians: Gaussians with direction-dependent scale (covariance), enabling elongated or flattened primitives to better fit surfaces. "It represents scenes with millions of anisotropic Gaussians and uses a tile-based rasterizer for efficiency."
- COLMAP: A structure-from-motion and multi-view stereo pipeline used to estimate camera poses and sparse reconstructions. "which were pre-processed with COLMAP to obtain initial camera poses and a sparse point cloud."
- Densification: The process of growing the number of Gaussians during training to better cover scene geometry. "The standard 3DGS densification schedule was kept intact for all methods."
- Depth Anything: A family of monocular depth estimation models used as geometric priors when ground-truth depth is unavailable. "When ground truth depth is not available, monocular depth estimators such as MiDaS \cite{MiDaS2022, DPT2021} and Depth Anything \cite{DepthAnything2024, DepthAnythingV2_2024} can provide valuable, although scale and shift ambiguous, geometric cues."
- Differentiable rasterizer: A rendering module whose operations are differentiable, enabling gradient-based optimization through rendering. "It builds directly upon the publicly available 3DGS source code with its tile-based differentiable rasterizer \cite{3DGS2023}."
- Exponential Moving Average (EMA): A smoothed running statistic that emphasizes recent values, used here to track optimization activity. "We monitor optimizer usage through an exponential moving average (EMA) of the position-gradient norm."
- Floater: A translucent, unsupported Gaussian artifact that appears detached from true surfaces. "This method often produces visual artifacts known as floaters--nearly transparent, disconnected elements that drift in space away from the actual surface."
- Gaussian covariance matrix: The 3D covariance defining a Gaussian’s shape and anisotropy in space. "Guards for geometry analyze the Gaussian's shape as derived from its 3D covariance matrix."
- Huber loss: A robust loss function less sensitive to outliers than L2, used for depth regularization. "ρ is a Huber loss function, which is less sensitive to large prediction errors."
- k-nearest neighbors (k-NN): A neighborhood measure used to compute spatial isolation by averaging distances to the closest k points. "We quantify this isolation by calculating the average distance of each candidate to its -nearest neighbors (k-NN) in 3D space."
- Learned Perceptual Image Patch Similarity (LPIPS): A perceptual image similarity metric that correlates with human judgments. "we report standard image quality metrics such as PSNR (Peak Signal-to-Noise Ratio), SSIM (Structural Similarity Index Measure), and LPIPS (Learned Perceptual Image Patch Similarity)"
- LP-GS: A baseline Gaussian-splatting variant included for comparison in experiments. "All baseline methods, including the original 3DGS \cite{3DGS2023}, Pixel-GS \cite{PixelGS2024}, LP-GS \cite{LPGS2024}, and Micro-Splatting \cite{MicroSplatting2024}, were retrained from scratch on our data splits using their author-recommended hyperparameter settings."
- Micro-Splatting: A recent approach improving stability in Gaussian splatting; used here as a reference point for cleanup strategies. "It adds a regular cleanup stage to the standard training process that is driven by evidence and context, similar to Micro-Splatting \cite{MicroSplatting2024}."
- MiDaS: A monocular depth estimator used as a soft geometric prior for training. "we incorporate a geometric prior from a pretrained monocular depth estimation network, MiDaS \cite{MiDaS2022, DPT2021}."
- Mip-NeRF 360: A dataset of multi-view scenes used for evaluation of 3D reconstruction methods. "and the Room scene from the Mip-NeRF 360 dataset \cite{MipNeRF3602022}."
- Monocular depth: Single-image depth prediction used as a soft constraint to regularize geometry. "This targeted cleanup is supported by a monocular depth-based loss function that helps improve the overall geometric structure of the scene."
- Neural Radiance Fields (NeRF): An implicit volumetric representation for novel view synthesis via neural networks. "Novel View Synthesis was significantly advanced by Neural Radiance Fields (NeRF) \cite{NeRF2020}, which introduced an implicit volumetric representation of a scene."
- Novel View Synthesis: Generating images of a scene from new camera viewpoints given a set of input views. "Novel View Synthesis was significantly advanced by Neural Radiance Fields (NeRF) \cite{NeRF2020}, which introduced an implicit volumetric representation of a scene."
- Occlusion: The blocking of light or visibility by closer objects, enforced during compositing. "ensuring that closer objects correctly occlude those farther away."
- Opacity (in pruning): The per-Gaussian transparency level, often used as a heuristic for removal. "The standard 3DGS training loop uses simple and view-independent rules for pruning, such as removing Gaussians with low opacity \cite{3DGS2023}."
- Peak Signal-to-Noise Ratio (PSNR): A pixel-wise image fidelity metric used to evaluate reconstructions. "we report standard image quality metrics such as PSNR (Peak Signal-to-Noise Ratio), SSIM (Structural Similarity Index Measure), and LPIPS (Learned Perceptual Image Patch Similarity)"
- Photometric loss: An image-space reconstruction loss guiding rendering to match input photographs. "the optimizer is prone to creating geometrically incorrect structures to satisfy the photometric loss."
- Pixel-GS: A Gaussian-splatting method that uses pixel-aware gradients to reduce artifacts. "Methods like Pixel-GS \cite{PixelGS2024} use pixel-aware gradients to guide the creation of Gaussians more carefully, which can reduce artifacts but at the cost of increased model size and training time."
- Point-based rendering: Rendering techniques that represent surfaces with point primitives rather than meshes or volumes. "This approach is based on ideas from classic point-based rendering techniques \cite{SurfaceSplatting2001, EWASplatting2002, QSplat2000}."
- Spherical Harmonics (SH): A basis for modeling view-dependent color on Gaussians. "color, which is modeled using Spherical Harmonics (SH) to capture view-dependent effects \cite{3DGS2023}."
- Structural Similarity Index Measure (SSIM): An image quality metric focusing on structural coherence. "we report standard image quality metrics such as PSNR (Peak Signal-to-Noise Ratio), SSIM (Structural Similarity Index Measure), and LPIPS (Learned Perceptual Image Patch Similarity)"
- Tanks and Temples dataset: A large-scale multi-view benchmark with challenging indoor scenes. "Auditorium, Ballroom, Church, and Museum from the Tanks and Temples dataset \cite{TanksnTemples2017}"
- Tile-based rasterizer: A GPU-friendly rasterization scheme that processes images in tiles for efficiency. "It represents scenes with millions of anisotropic Gaussians and uses a tile-based rasterizer for efficiency."
- Transmittance: The accumulated transparency allowing light from farther Gaussians to reach the camera. "The term denotes the transmittance, which calculates how much light from Gaussians behind the -th one can reach the camera."
- Uncertainty-aware loss: A training objective that weights errors by prediction uncertainty to avoid over-trusting noisy priors. "using an uncertainty-aware loss function that adapts its influence during training \cite{UncertaintyWeighting2018}."
- Volumetric representation: A continuous 3D field (e.g., density and color) representation used for rendering and view synthesis. "which introduced an implicit volumetric representation of a scene."
Collections
Sign up for free to add this paper to one or more collections.