- The paper presents AirCons, a novel algorithm that achieves consensus in vehicle platooning by harnessing over-the-air signal superposition without individual CSI training.
- It introduces an iterative signal exchange method with independent sub-carrier allocation that reduces platooning control errors by over 14% in simulations.
- The study demonstrates practical viability under real-world V2V constraints, paving the way for scalable, decentralized autonomous vehicle control.
Over-the-Air Consensus for Distributed Vehicle Platooning Control
The paper "Over-the-Air Consensus for Distributed Vehicle Platooning Control (Extended version)" introduces AirCons, a novel distributed algorithm designed to address the challenges involved in coordinating autonomous vehicles (AVs) in a platoon using vehicle-to-vehicle (V2V) communications. The core innovation lies in leveraging the superposition and broadcasting properties of wireless signals to achieve consensus without the need for individual channel state information (CSI) training for each vehicle link.
System Model and Challenges
In a typical vehicular platoon, various autonomous vehicles move together maintaining the same velocity and constant inter-vehicle distances in a string-stable manner. The system model assumes N+1 AVs operating on a single-lane highway (Figure 1), where the leader vehicle dictates the group velocity, and follower vehicles need to maintain this velocity while keeping a specific distance, d, from each other.
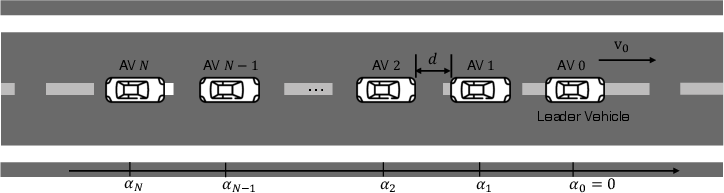
Figure 1: A graphical illustration of platooning control with (N+1) AVs on a straight highway.
The traditional use of V2V communications faces significant challenges, such as latency, packet loss, and the resource-intensive nature of maintaining accurate CSI in dynamic environments where frequent training is required. This results in uncertainties that may cause string instability if not managed properly.
AirCons Algorithm Design
AirCons addresses these challenges by implementing a novel consensus mechanism that accumulates and broadcasts AV position data to reach a collective consensus without individual CSI requirements. The algorithm is built around the following key features:
- Independent Consensus Process: Sub-carriers are allocated per consensus process, allowing simultaneous and interference-free consensus building among different AV clusters.
- Superimposed Channel Estimation: The superposition of broadcasts across multiple vehicles is harnessed, and a single common pilot allows for estimation of a superimposed channel coefficient.
- Iterative Signal Exchange: Each vehicle updates its transmitted signal iteratively over several rounds (Figure 2), converging on a value that represents the average position necessary for control actions.
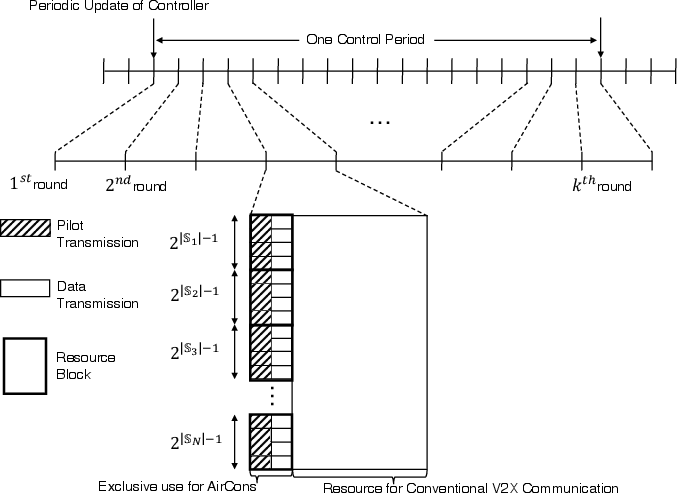
Figure 2: A graphical illustration of resource block configuration in AirCons process with multiple rounds.
A critical part of the design is the updating process for data signals, which iteratively integrates received data with past decisions using a weighted factor, ρ. This iterative approach ensures convergence to the true consensus value, proportional to the average relative distances, facilitating robust decentralized control.
The effectiveness of AirCons is demonstrated through extensive simulations indicating substantial improvements in string stability and control accuracy over existing benchmarks (Figure 3). Specifically, the paper reports a significant reduction in platooning control errors by over 14%, affirming AirCons' viability in maintaining synchronized vehicular dynamics even under the variable delay and packet loss constraints typical of real-world V2V environments.
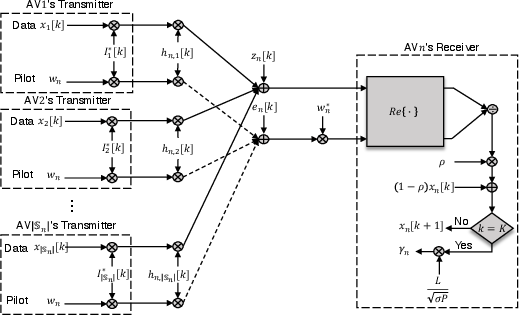
Figure 3: Platooning control and the resultant performance of AirCons over time. The position trajectory, vehicle velocity, and comparison of accumulated position error between AirCons and benchmarks are depicted.
Additionally, practical considerations such as resource block configuration and assumptions on coherence times/bandwidths are addressed, ensuring AirCons’ adaptability in modern vehicular network implementations like New Radio (NR) systems.
Conclusion
The research presents a robust joint communication and control architecture that effectively enhances autonomous vehicular platooning capabilities. The independence from individual CSI training presents a substantial reduction in communication overhead, making AirCons suitable for large-scale deployments. Future extensions could further explore resource allocation strategies and adapt AirCons to increasingly complex driving scenarios, thereby broadening its applicability in various V2X environments.

