- The paper introduces a novel Distributed Nonlinear Model Predictive Control framework that enables dynamic platoon management in heterogeneous vehicle groups.
- It incorporates real-time metric learning using ADMM to optimize safety, fuel economy, and driving comfort during cut-in/cut-out maneuvers.
- Simulations validate timely convergence and stability, demonstrating the system's capability to adapt to rapid changes in platoon composition.
Distributed Nonlinear Model Predictive Control and Metric Learning for Heterogeneous Vehicle Platooning with Cut-in/Cut-out Maneuvers
Introduction
This paper presents a detailed analysis and implementation of a Distributed Nonlinear Model Predictive Control (DNMPC) system for managing platoons of heterogeneous vehicles performing dynamic maneuvers such as cut-ins and cut-outs. The system is designed to maintain collision-free operation, track desired speed profiles, and ensure safe inter-vehicle distances using various unidirectional communication topologies.
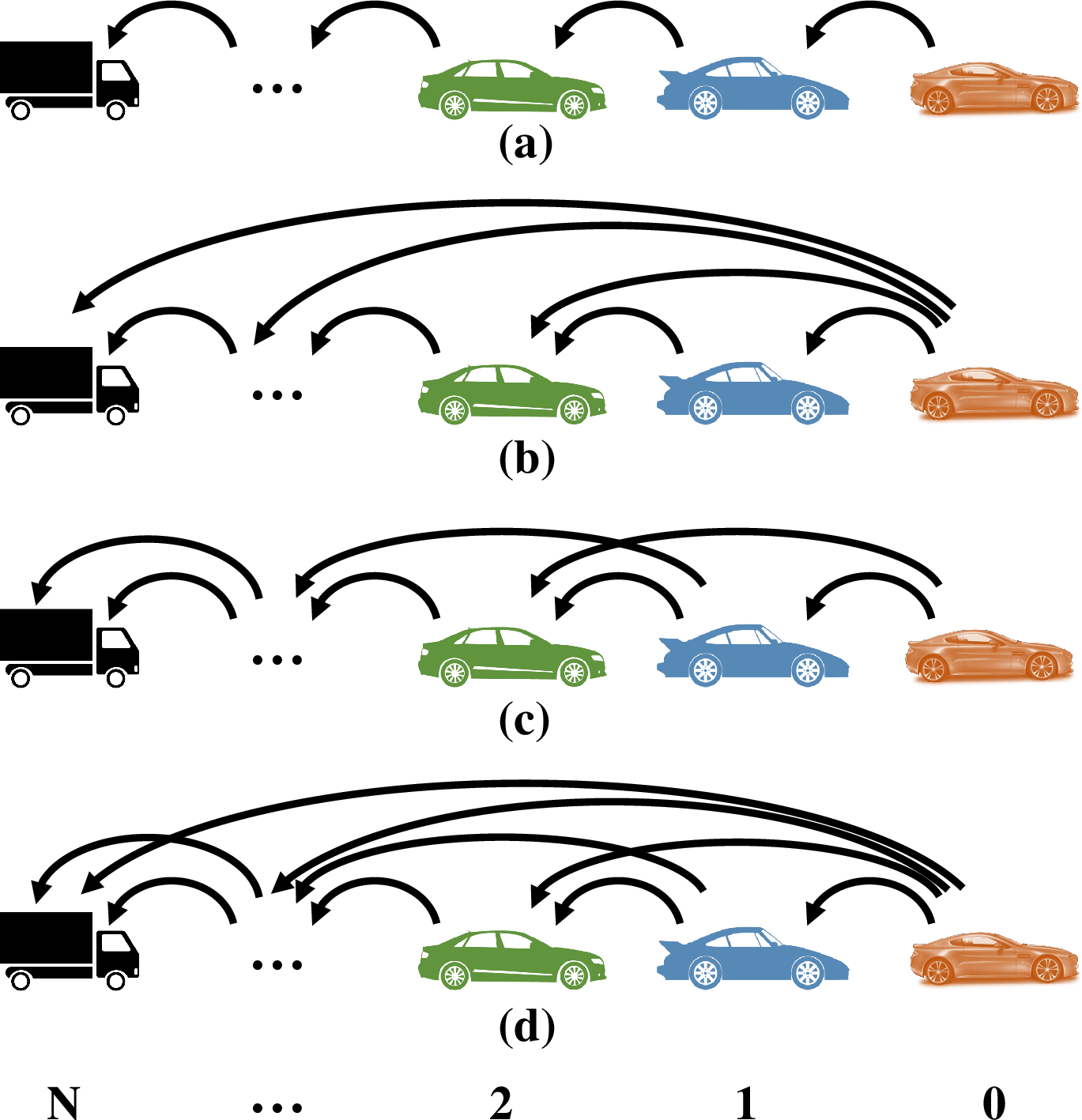
Figure 1: Unidirectional topology: (a) PF, (b) PLF, (c) TPF, and (d) TPLF, with vehicle 0 as the LV.
System Modeling
The system models the longitudinal dynamics of a platoon consisting of a Lead Vehicle (LV) and multiple Follower Vehicles (FVs). Each vehicle's dynamics are described by its position, velocity, and integrated driving torque. The model incorporates vehicle-specific parameters such as mass, drag coefficient, and tire radius.
Distributed Nonlinear Model Predictive Control
The control strategy utilizes DNMPC with prediction and control horizons to optimize vehicle control inputs. This optimization adheres to constraints ensuring desired inter-vehicle distances and velocity tracking while accommodating dynamic platoon changes due to cut-in and cut-out maneuvers.
Dynamic Platoon Control
The authors extend DNMPC to handle dynamic platooning scenarios, addressing challenges associated with heterogeneous vehicle characteristics and communication topologies. The paper derives convergence times for the system following dynamic maneuvers, ensuring quick adaptation to changes in platoon composition while maintaining system stability and performance.
Metric Learning and Driving Experience Analysis
The paper leverages distributed metric learning to assess driving experience metrics such as comfort and fuel economy. This is achieved through ADMM optimization, ensuring the learning process aligns with theoretical stability guarantees provided by DNMPC.
Key to this approach is formulating an optimization problem that encapsulates control objectives and constraints across vehicles, ensuring the optimization aligns with stability constraints dictated by the system's underlying control strategy.
Simulations
The authors conduct simulations to validate their approach, using a scenario of a platoon subjected to cut-in and cut-out maneuvers. Results demonstrate the system's capability to efficiently manage dynamic transitions in platoon structure and maintain stability.
- Convergence Analysis: The simulations confirm predicted convergence times, indicating the system's effectiveness in ensuring timely adaptation to dynamic changes.
- Driving Experience: The study uses metric learning to project driving dynamics onto learned subspaces, highlighting key experiential factors such as smoothness and control efficacy.
Conclusion
The research establishes a comprehensive framework for managing heterogeneous vehicle platoons with DNMPC, integrating metric learning to enhance system performance. The paper suggests future work could explore string stability and lateral dynamics to further enhance platoon control strategies.
In conclusion, the advancements in DNMPC outlined in this paper hold significant promise for improving vehicle platooning in dynamic traffic environments. The integration of metric learning with traditional control approaches offers a novel pathway to optimizing driving experience and operational efficiency in autonomous vehicle systems.

