- The paper introduces an EMPC-based planning framework that explicitly optimizes the trade-off between energy efficiency and collision safety in marine vehicles.
- It details a multistage path smoothing approach using Voronoi diagrams and Bézier curves to generate dynamically feasible and robust reference trajectories.
- Validation on a mono-hull marine platform demonstrates reduced energy consumption with increased economic weighting, while maintaining real-time tracking feasibility.
Economic Model Predictive Control-Based Planning for Marine Vehicles: Tuning Safety and Energy Efficiency
Introduction
This paper addresses the dual-objective online motion planning problem for marine vehicles, focusing on safety and energy efficiency within cluttered environments. Traditional methods such as geometric model-based, potential field, and sampling-based approaches exhibit limitations regarding dynamic feasibility or multi-objective optimality. The paper introduces a novel framework leveraging Economic Model Predictive Control (EMPC) to explicitly balance power consumption and collision safety margin during receding-horizon motion planning. The approach includes computation of energy consumption as an economic cost and establishes a formal safety measure via reference trajectory adherence.
Dynamic Modeling and Problem Statement
The marine vehicle is modeled in the horizontal plane with three degrees of freedom: surge, sway, and yaw. The vehicle dynamics, expressed in both earth-fixed and body-fixed frames, are reduced to a form that neglects off-diagonal inertial and nonlinear damping terms for moderate speeds. The planning problem requires generating a trajectory from start to destination that respects system constraints, avoids obstacles, and enables adjustable trade-offs between safety and energy consumption.
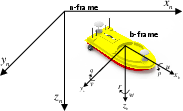
Figure 1: Representation of vehicle states and velocity in earth-fixed (n) and body-fixed (b) frames with associated DOFs.
Safety Margin Trajectory Generation
Path Searching with Voronoi Diagrams
The framework begins by constructing a Voronoi diagram of the environment to encode maximal clearance paths via graph search (Dijkstra’s algorithm). The path selection process employs a multiscale priority cost integrating jerk, acceleration, and path length. Weights in the cost allow tuning the importance of smoothness versus overall path length, enabling optimized selection of trajectories suitable for subsequent smoothing and tracking.
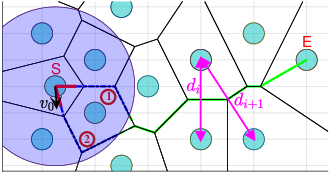
Figure 2: Decomposition of path segments for cost computation: initial jerk (red), mid-trajectory acceleration (blue), and remaining length (green).
Smoothing with Bézier Curves
The paper introduces a robust method to smooth the reference path using piecewise Bézier curves. The selection of control points for the initial curve segment is formally classified into distinct geometric cases based on the layout of waypoints and Voronoi vertices. For each configuration, optimization ensures both minimal curvature (for energy/smoothness) and convex hull collision-avoidance properties. The construction handles both densely and sparsely populated obstacle environments via distinct strategies for control point selection.
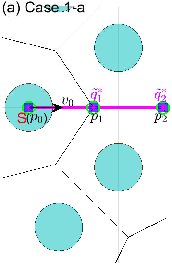
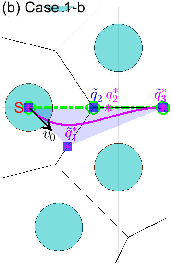
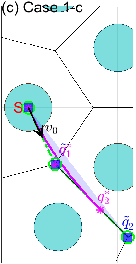
Figure 3: Case 1 scenarios for first segment smoothing using optimal control points and convex hull maximization.
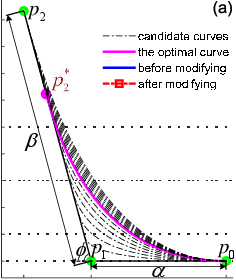
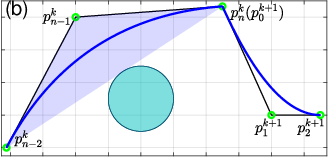
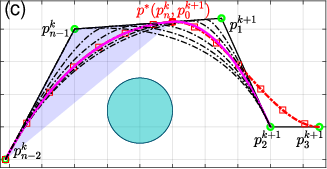
Figure 4: Optimization of quadratic and cubic Bézier curve parameters for constrained curvature continuity.
Subsequent path segments are incrementally smoothed while maintaining G1 continuity, with additional algorithms for collision-free control point selection. Special adjustments are made at segment junctions to guarantee smooth transitions.
(Figures 5, 6, 7, 8, 9)
Figure 5: Case 2 control point and curve construction for obtuse trajectory connections.
Figure 6: Case 3 path smoothing with non-collinear, non-intersecting initial waypoints.
Figure 7: Case 4 for same-side offset waypoints.
Figure 8: Smoothing modifications for sparse obstacle environments.
Figure 9: Greedy selection of subsequent control points with collision avoidance.
Reference Trajectory Conversion
Smoothed paths are converted into time-parametrized trajectories using the Bézier representation. Velocity profile scheduling is performed to satisfy both physical limits (via time constants) and the need for feasible dynamic tracking by the marine vehicle.
EMPC-Based Online Planner Design
The motion planner solves at each receding horizon iteration a continuous-time optimal control problem. The EMPC objective function contains:
- An economic cost proportional to actuator power usage, derived from propeller thrust via a nonlinear (1.5-power) mapping.
- A tracking cost penalizing deviation from the safety margin reference trajectory.
- Additional penalties on input jerk and magnitude, subject to state, input, and collision avoidance constraints with explicit safety margins.
This formulation decouples safety from energy in the objective, making their trade-off directly tunable by design (via weighting parameters).
Receding Horizon and Reference Construction Strategies
To ensure computational feasibility, a receding-horizon planning loop is used: planning is re-triggered as the vessel enters new sensor-visible regions. The reference itself is recomputed at each planning interval—starting not from the current vehicle state but from a position matched to the receding reference, allowing the EMPC controller more flexibility to optimize energy.
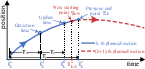
Figure 10: Timeline-based receding-horizon planning logic, with explicit accounting for planning, execution, and sensor detection intervals.
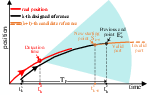
Figure 11: Schematic of safe reference construction through fusion of previously planned and newly generated reference segments.
Hardware Evaluation
Experiments were conducted on a physical mono-hull marine platform with known inertial, damping, and actuator characteristics.
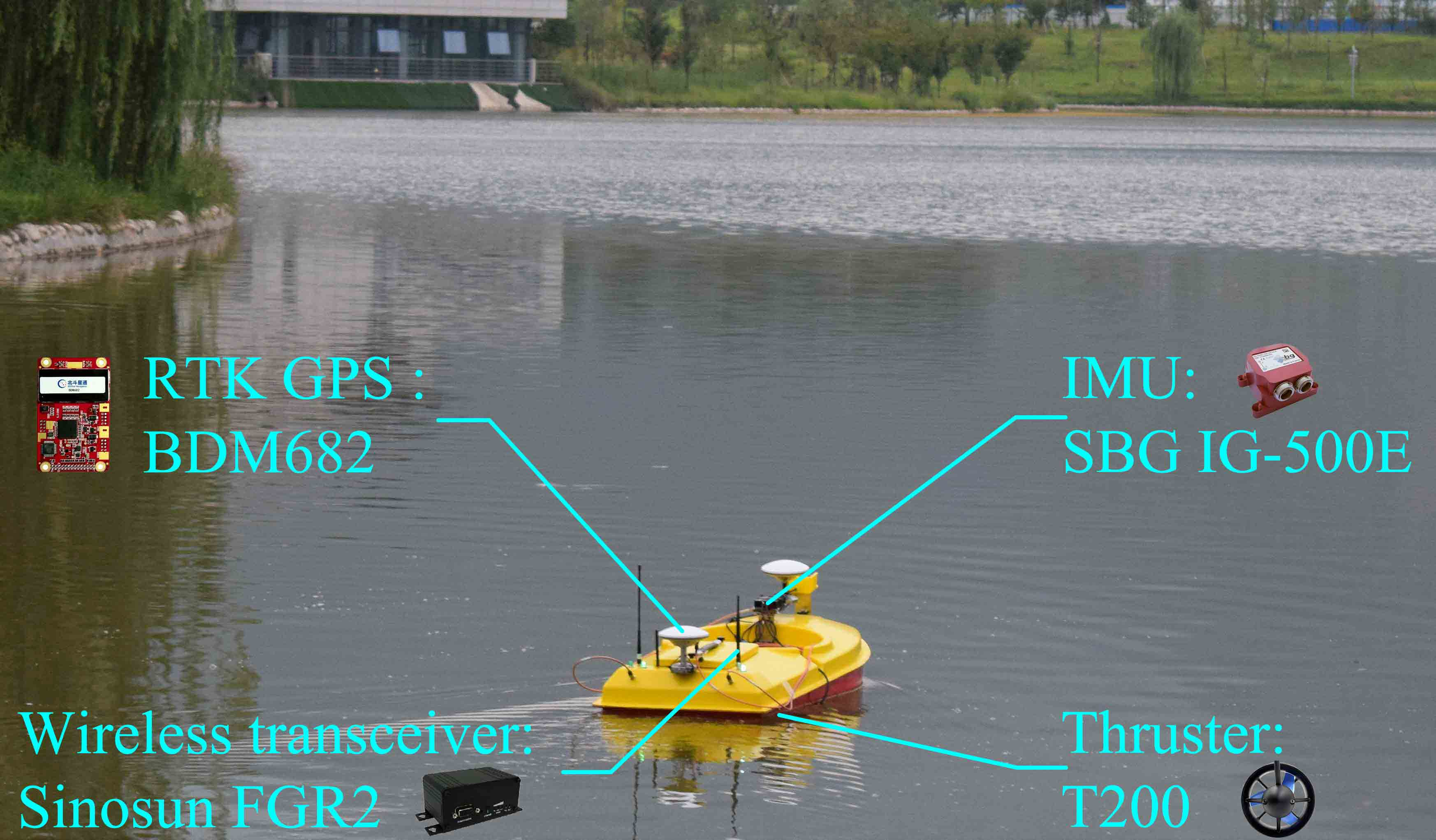
Figure 12: Mono-hull experimental marine vehicle platform used for validation.
The test route connects known waypoints in a cluttered virtual obstacle field, with receding-horizon sensing. Comparisons of energy consumption under varying EMPC economic cost weights (kec) are provided. As kec increases, total energy consumption demonstrably decreases at the expense of a larger safety margin (greater average clearance from obstacles).
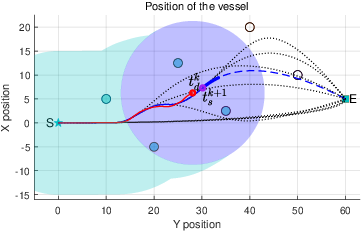
Figure 13: Illustration of the online receding horizon motion planning process in a dynamic, partially observed environment.
Tracking error metrics confirm that the planned motions remain feasible for real-time tracking by an MPC controller. Varying the economic term shows explicit control over energy-safety behaviors.
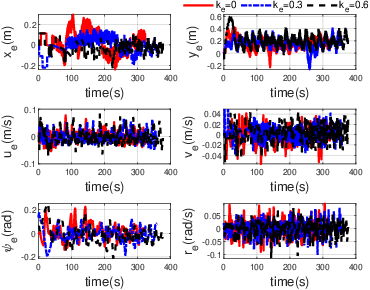
Figure 14: Distribution of trajectory tracking errors during hardware experiments.
Implications and Future Directions
The framework allows systematic and real-time synthesis of dynamically feasible, energy-optimal, and robustly safe motion plans for marine vehicles under complex environmental constraints. The explicit inclusion of power modeling at the planning stage is a significant advancement over classical geometric or tracking-only planners, supporting applied autonomy for long-duration missions in energy-limited domains. The formalism admits extensions to other robotic vehicles with similar actuation and safety constraints. Potential future directions include adaptive online weighting of the economic and safety terms based on mission progress, multi-agent coordination with coupled safety margins, and learning-augmented EMPC cost models for unmodeled disturbances and complex hydrodynamics.
Conclusion
The paper presents a complete, formally grounded pipeline for model-based, safety-moderated, and energy-efficient motion planning for marine vehicles. Through integrated EMPC design, advanced path smoothing, and a receding-horizon executive, the method supports real-world deployment with quantifiable safety and resource constraints (2112.05844).