- The paper introduces a Hermite spline-based planner that unifies spatial and temporal optimization, reducing computation and travel times.
- The methodology leverages degree-5 Hermite splines with Ck continuity and diffeomorphic mappings to enable efficient gradient-based optimization.
- Extensive simulations and real-world experiments demonstrate MIGHTY’s superior performance in dynamic obstacle avoidance and aggressive maneuvering.
Efficient UAV Trajectory Planning with Hermite Splines: MIGHTY
Introduction and Context
Trajectory planning for autonomous aerial vehicles demands fast, robust generation of feasible paths in environments replete with geometric complexity and dynamic obstacles. Prior UAV trajectory planning methods have leveraged polynomial and spline-based representations—often partitioned into spatial and temporal components—to achieve computational tractability. However, standard frameworks induce limitations: hard-constraint planners incur high computational cost, while popular soft-constraint planners (e.g., MINCO-based, B-spline-based methods) either restrict the flexibility of the parameter search space, decouple temporal and spatial optimization, or sacrifice strictly local control, complicating per-segment constraint management.
MIGHTY introduces a Hermite spline-based trajectory planner for UAVs enabling unified spatiotemporal optimization over a continuous, high-dimensional search space, retaining local control and superior flexibility. It achieves substantial reductions in both computation and travel time compared to state-of-the-art methods and demonstrates robust performance in hardware and simulation—even under aggressive maneuvers and heavily cluttered or dynamic scenes (2511.10822).
Unlike standard polynomial or B-spline planners, MIGHTY employs degree-d Hermite splines, where knot states include not just position but up to order k derivatives (velocity, acceleration). For d=5, each segment is parameterized by positions, velocities, and accelerations at both endpoints, along with segment durations. This direct parameterization enables true Ck continuity across segments by construction, promoting locally modifiable and dynamically feasible trajectories.
The optimizer treats waypoints, endpoint derivatives, and segment times as decision variables, and applies diffeomorphic mappings (e.g., log transforms for positive durations) to ensure unconstrained optimization while maintaining domain validity. To address the numerical instabilities arising from raw derivative scaling—short segments can disproportionately affect gradients—the formulation exploits locally time-normalized velocity and acceleration variables.
Costs and gradients are computed in both Hermite and Bézier representations, exploiting the numerical efficiency of Bézier evaluation at sampled points while guaranteeing continuity via Hermite variables during optimization.
Objective Function and Analytical Gradient Computation
MIGHTY's cost function is constructed from a combination of smoothness terms (minimum-jerk), corridor and dynamic constraint penalties (velocity, acceleration, jerk), and soft-barrier penalties for static and dynamic obstacle avoidance. The method provides closed-form expressions for gradients w.r.t. all variables, enabling efficient gradient-based optimization.
Sampling-based costs and analytical forms for integral terms (e.g., jerk integrals using Bernstein Gram matrices) further reduce computational overhead, making the method well-suited for onboard real-time planning at high replanning rates.
Empirical Evaluation: Simulation Benchmarks
Simple Corner Avoidance Scenario
MIGHTY's performance was first benchmarked against GCOPTER, a MINCO-based fifth-order polynomial planner, in a simple corridor avoidance setup.
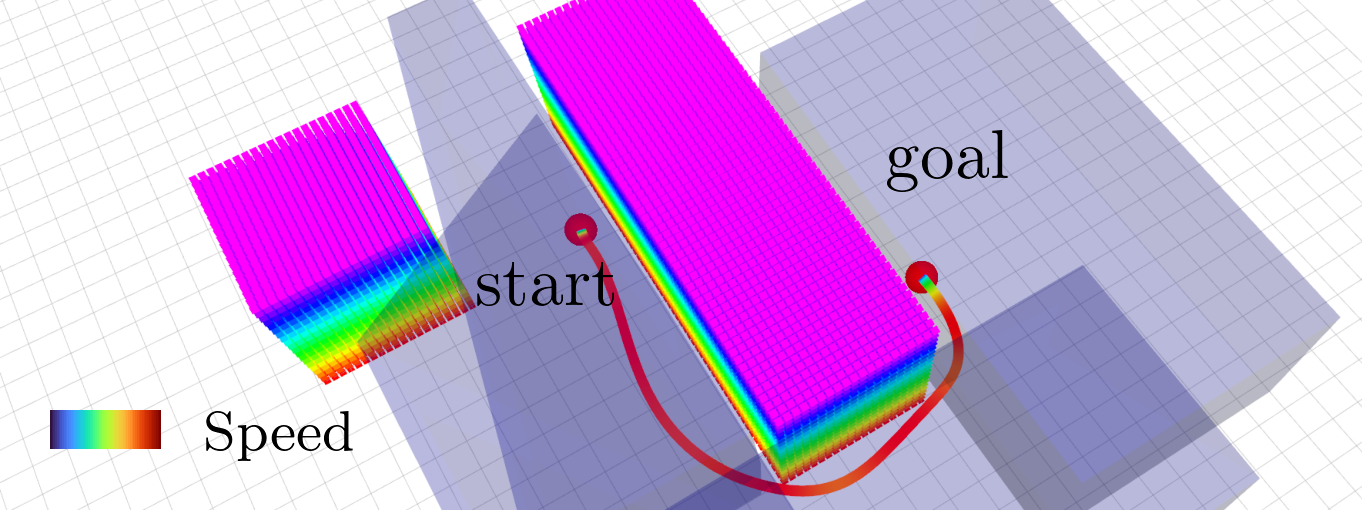
Figure 1: Benchmark scenario for corner avoidance; safe corridors are shown in blue, MIGHTY's trajectory colored by speed.
In direct comparison, MIGHTY achieved reduced computation time, travel time, and path length, while GCOPTER produced trajectories with lower overall jerk due to its manifold restrictions.
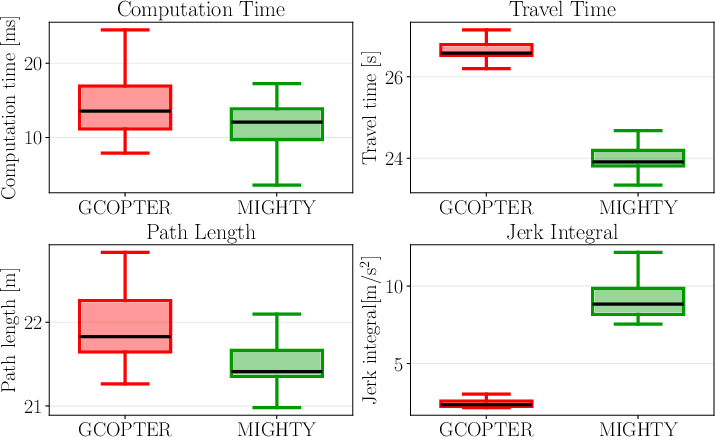
Figure 2: Comparative results: MIGHTY attains lower computation and travel time vs. GCOPTER, with marginal differences in path length and jerk.
Complex Scene Benchmarking
Evaluated in a complex 30×40 m static scene across varying speed limits, MIGHTY again yielded consistent improvements in computation (mean −9.3%), travel time (−13.1%), and path length (−1.4%) relative to state-of-the-art baselines. Jerk integrals were larger—reflecting more aggressive maneuvers enabled by the expanded search space.
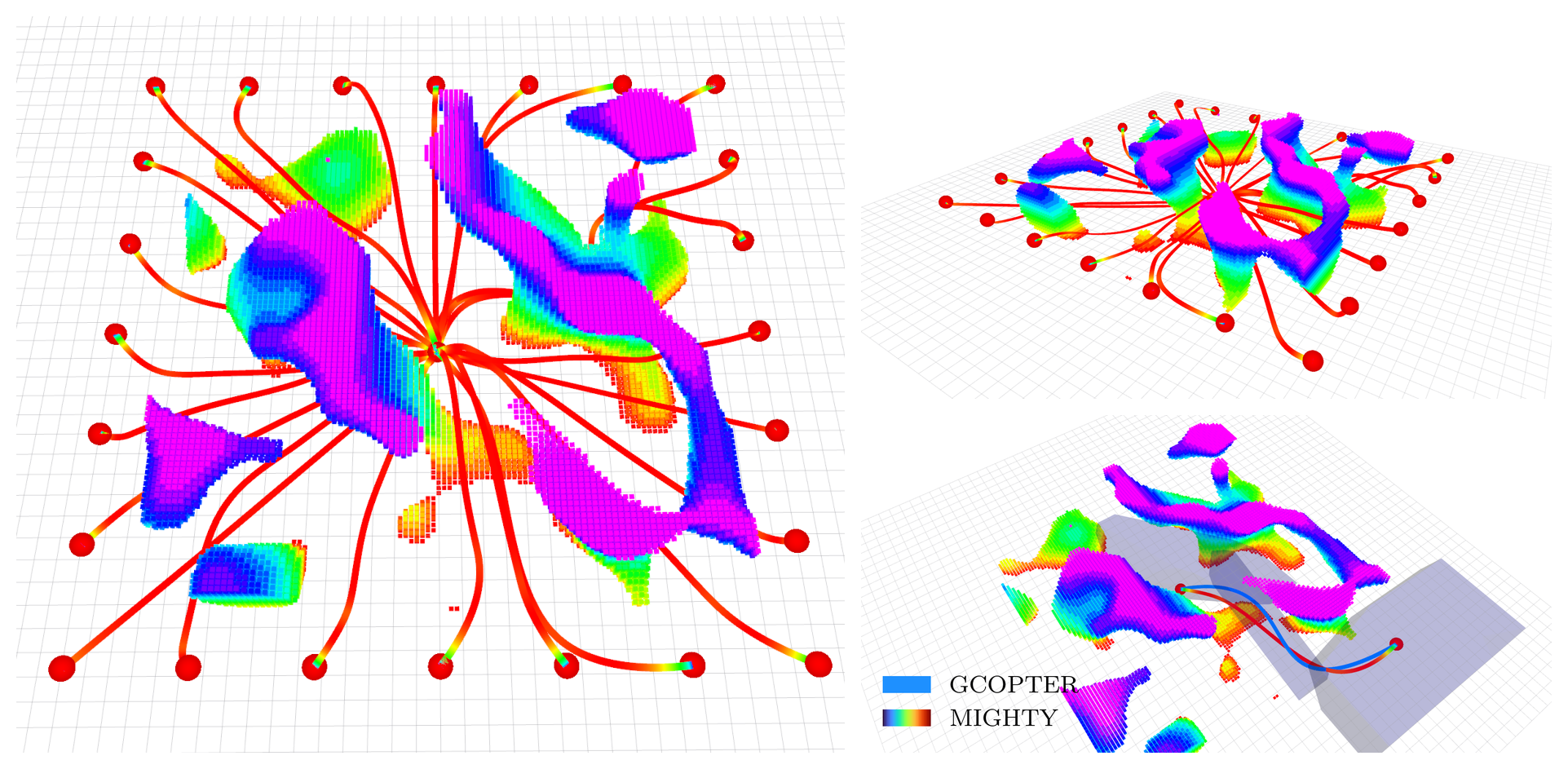
Figure 3: MIGHTY's trajectory (warm colors), GCOPTER's trajectory (blue), and safe flight corridors in a complex static benchmarking environment.
Numerical Stability: Ablation Study
A thorough ablation confirmed that scaling derivative variables approximately doubled computational speed and reduced trajectory jerk, with negligible effect on travel time or path length.
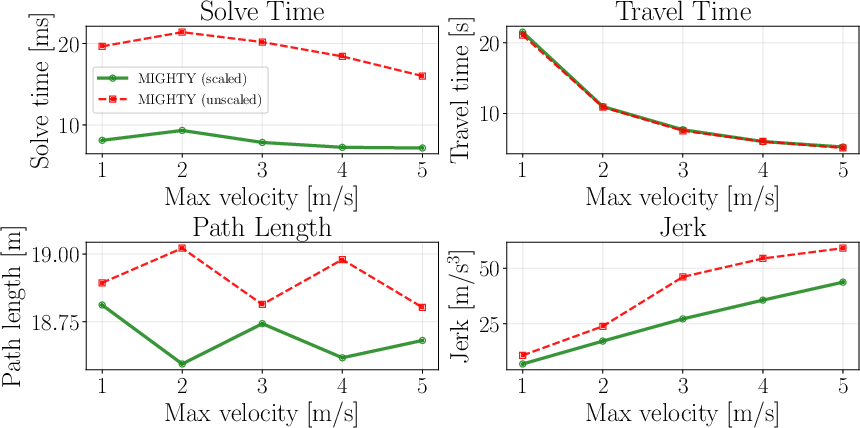
Figure 4: Ablation: Scaled MIGHTY yields %%%%8d=59%%%% faster computation and reduced jerk, demonstrating superior numerical properties.
Static and Dynamic Obstacle Benchmarks
MIGHTY was extensively validated in a large static forest environment populated with randomly placed cylindrical obstacles under stringent dynamic limits.

Figure 5: Example static obstacle scene with top-down point cloud and MIGHTY's speed-encoded path.
Compared with state-of-the-art planners (EGO-Swarm, EGO-Swarm2, SUPER), MIGHTY again achieved the shortest travel time and path length, with a k0 success rate and no dynamic constraint violation, whereas other planners had lower success rates in the same setting.
In dynamic scenarios—including 100 independently moving dynamic obstacles and a combined static + dynamic environment—MIGHTY demonstrated precise avoidance, maintaining minimal nearest-obstacle distances far above the robot collision radius.
Figure 6: MIGHTY's trajectory through a field of 100 dynamically moving obstacles, speed-coded for velocity.
Figure 7: Navigation in a mixed static-dynamic obstacle scenario; onboard point cloud (pink-orange), agent trajectory, and simulation views.
Hardware Experiments: Real-World Validation
Onboard experiments involved repeated long-duration flights, high-speed runs (up to 6.7 m/s), and missions with dynamically introduced and moved obstacles, with all perception, planning, and control executed onboard in real time.
Figure 8: Long-duration experiment; overlaid speed-coded trajectories at multiple k1 settings and point cloud mappings.
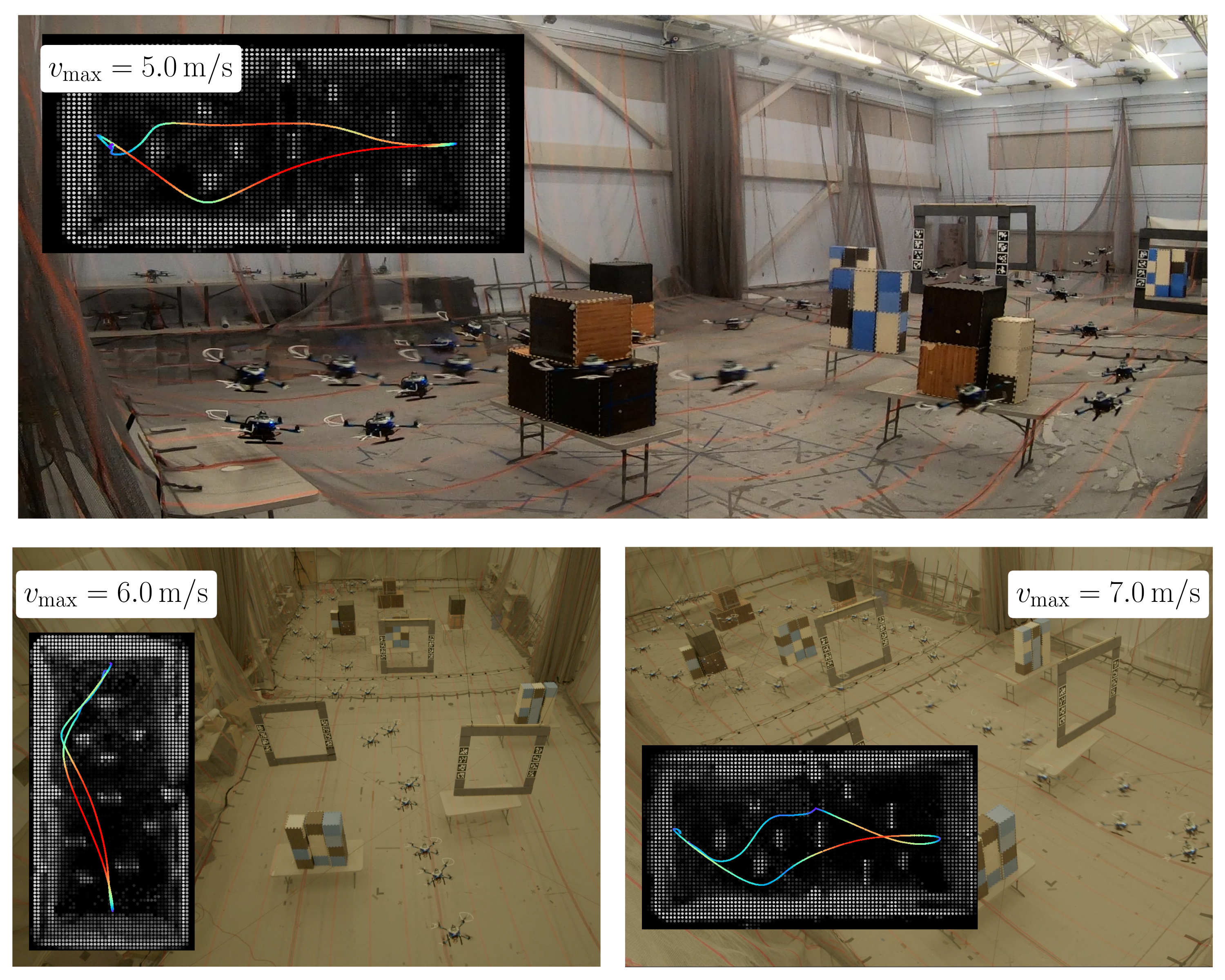
Figure 9: High-speed flights at k2 ranging from 5.0 to 7.0 m/s; all maneuvers collision-free, with smooth and time-optimal execution.
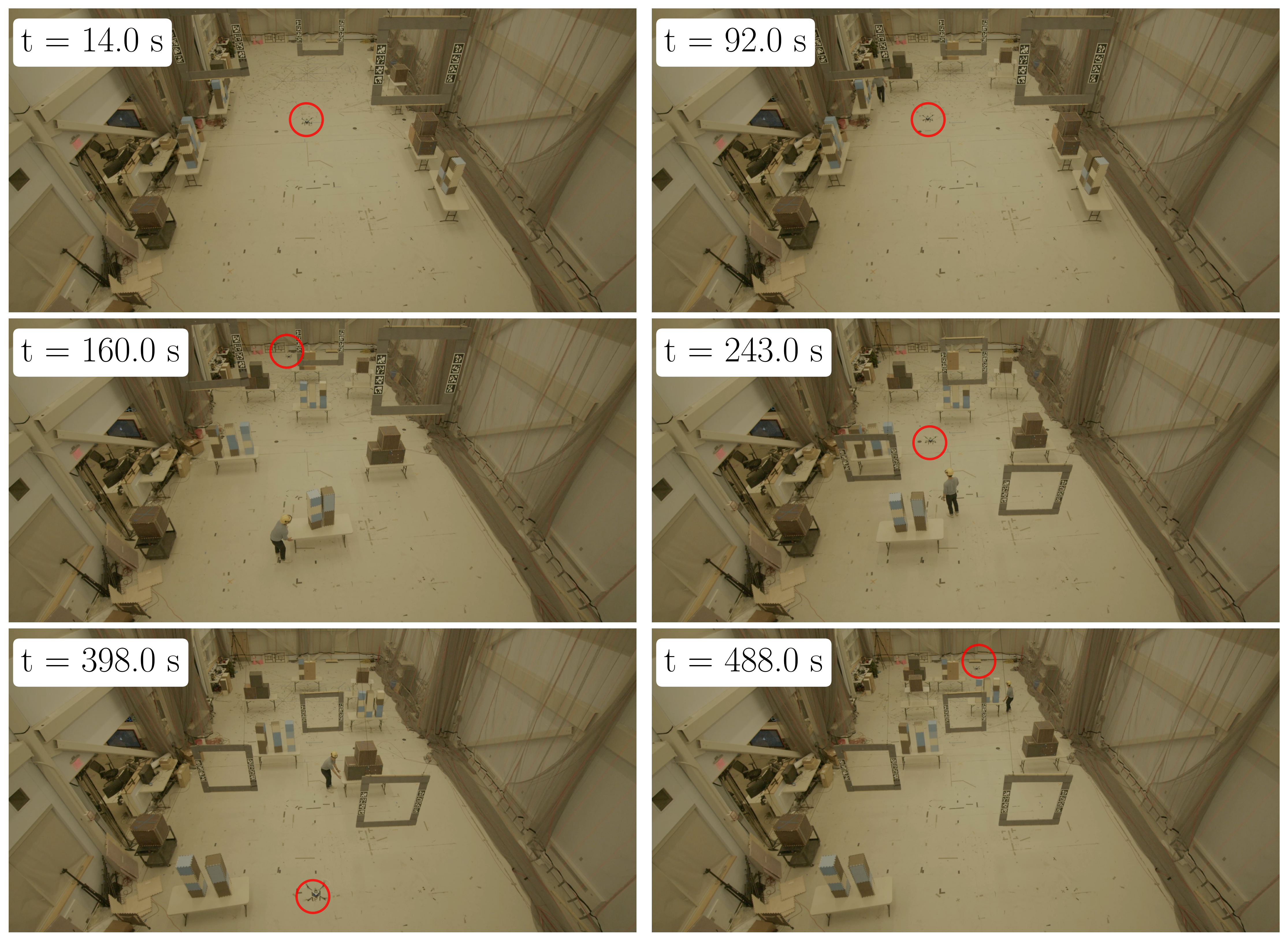
Figure 10: Dynamic obstacle environment; UAV trajectory and moving obstacles tracked in real-time.
Empirical results confirm that the Hermite spline framework maintains dynamic feasibility and safety under aggressive, time-optimal maneuvers in cluttered spaces and with unpredictable obstacle motion.
Implications and Future Directions
The continuous, locally controlled, and high-dimensional search space enabled by Hermite splines in MIGHTY substantially advances soft-constraint trajectory optimization for UAVs. This flexibility is particularly advantageous for handling complex, rapidly evolving objectives and constraints (including dynamic obstacles, perception-awareness, and field-of-view bounds), for which low-dimensional manifold planners suffer decreased expressivity or global coupling.
Practically, this approach enables robust, real-time planning on resource-constrained onboard systems and facilitates safe navigation in application domains such as autonomous inspection, search and rescue, and dynamic exploration. Theoretically, it sets a precedent for high-fidelity planning frameworks in robotics, suggesting future extensions incorporating richer cost structures (perception, multi-agent coordination, learning-based adaptation) and tighter integration with uncertainty quantification.
The Hermite paradigm, with its compatibility to variational learning (diffusion-like models for trajectory generation) and its strong analytical properties, may inspire new developments in data-efficient motion planning and feedback design across autonomous platforms.
Conclusion
MIGHTY demonstrates that Hermite spline-based spatiotemporal optimization for UAV trajectory planning yields marked improvements in computation, travel time, and real-world applicability over prevailing baselines. Its design supports aggressive flight, precise obstacle avoidance in both static and dynamic contexts, and real-time onboard deployment, constituting a robust foundation for advanced autonomous navigation in complex environments (2511.10822).

