- The paper demonstrates an I2V system that delivers real-time signal phase and timing data to reduce intersection hazards.
- It details a four-step approach including guideway construction, conflict zone detection, and blind zone sensor integration.
- Results suggest a cost-effective strategy (approximately $25K-$50K) to enhance safety and traffic flow at high-risk intersections.
Making Intersections Safer with I2V Communication
Introduction
Intersections for urban road users are fraught with hazards, due to the complex interactions among vehicles, bicycles, and pedestrians. The paper "Making intersections safer with I2V communication" (1803.00471) presents an innovative solution to address these challenges through intelligent infrastructure. By leveraging Infrastructure-to-Vehicle (I2V) communication, this approach provides critical real-time information to mitigate risks, thereby enhancing safety without the need for physical redesigns.
Intersections as Hazard Zones
Intersections lack lane markers, leading to conflict zones where trajectories intersect, increasing crash likelihood. Vision Zero (VZ) plans have attempted to improve safety by modifying intersections to enforce speed limits and lane reductions, aiming to protect pedestrians and cyclists. Despite such efforts, accidents persist due to incomplete phase information, temporal uncertainty, and blind spots. Autonomous vehicles (AVs), although poised to reduce human error-related crashes, struggle with intersection complexity as demonstrated by a significant proportion of AV crashes occurring near intersections [CADMV_Acc].
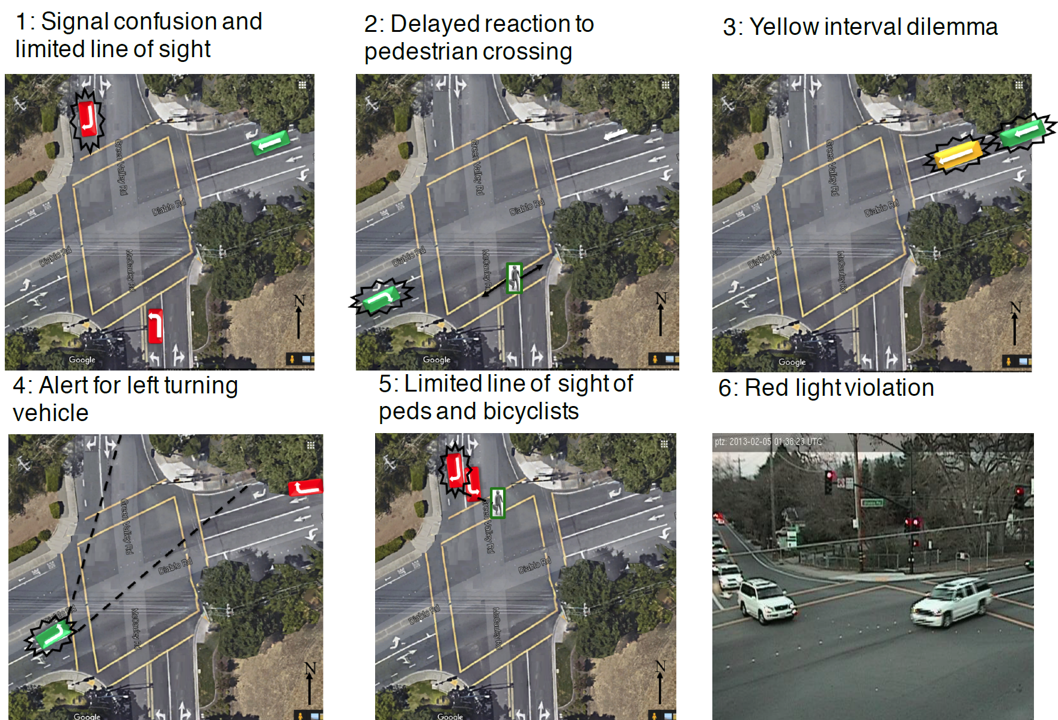
Figure 2: Common intersection conflict scenarios.
A Case Study: Accident Analysis
The paper analyzes an accident involving an automated Uber Volvo and a manual Honda CRV. The collision was attributed to insufficient communication regarding signal phases, blind spots caused by adjacent stationary vehicles, and misjudgments on occupancy predictions. These errors exemplify typical dilemmas faced at intersections, necessitating advanced I2V communication systems to furnish missing information.
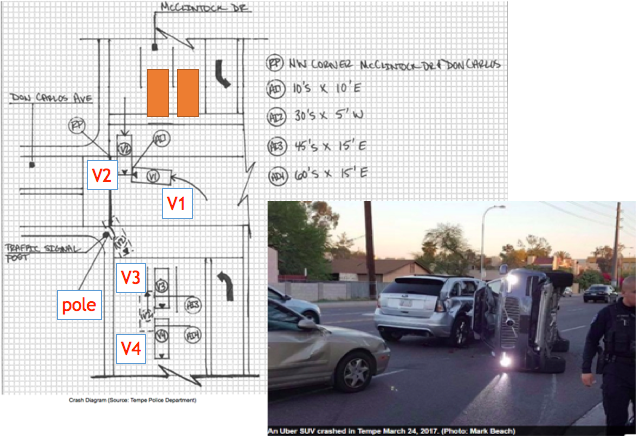
Figure 1: Collision scenario at a Tempe intersection involving automated Uber Volvo.
I2V Communication System Design
The paper proposes a four-step method to deploy I2V systems for enhancing intersection safety:
- Guideway Construction: Define trajectories and permissible movements, grouping them into guideways based on potential interactions.
- Conflict Zone Identification: Detect zones where guideways intersect, establishing potential points of collision.
- Conflict Resolution: Utilize signal lights and SPaT (Signal Phase and Timing) messages to differentiate permissible from conflicting movements, thereby minimizing judgment errors.
- Blind Zone Detection: Deploy sensors to ascertain occupancy within obscured regions, transmitting alerts to prevent unexpected intrusions.
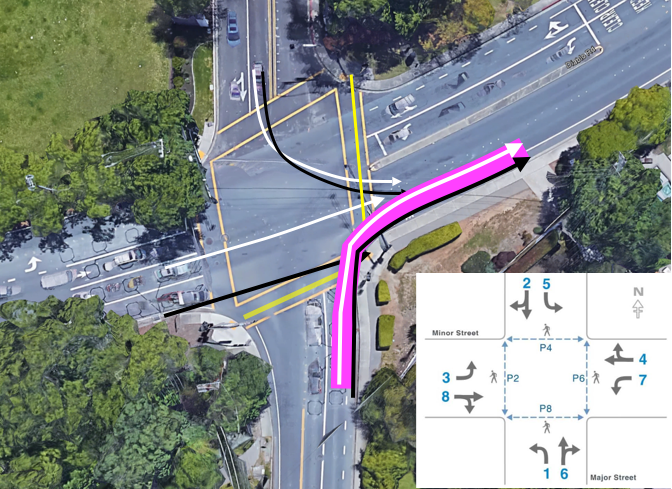
Figure 3: Trajectories and conflict zones impacting the safe execution of vehicle movements.
Intelligent Intersection
An intelligent intersection extends the infrastructure's capability, broadcasting comprehensive SPaT messages alongside blind zone occupancy alerts for AVs and connected vehicles. Red-light violator detection can further secure the intersection environment. The paper highlights the cost-effectiveness of such systems, estimating upgrades at \$25K-\$50K, while arguing for prioritizing high-risk intersections based on traffic analyses.
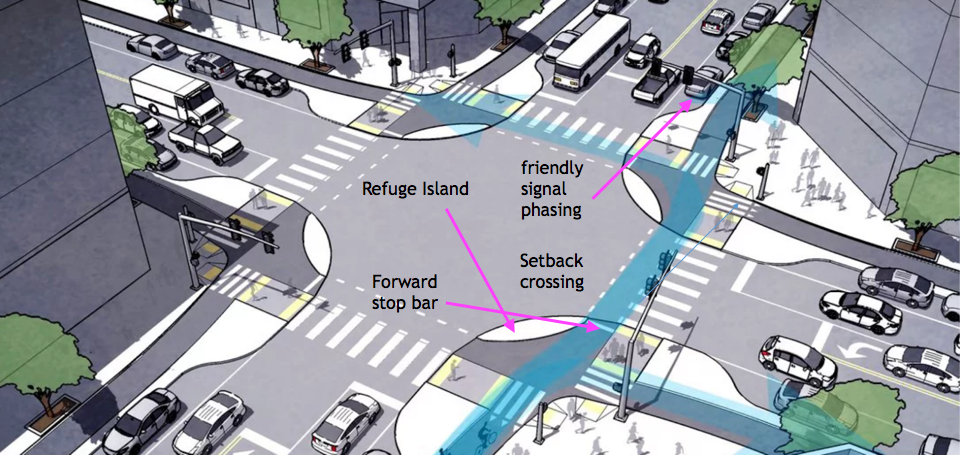
Figure 5: Schematic of a protected intersection design.
Implications and Future Directions
Intelligent intersections offer essential improvements over physical modification and isolated AV systems. By providing real-time spatial and temporal data, these systems augment vehicle decision-making processes, potentially reducing collision risk and improving traffic flow without sacrificing mobility. The paper suggests continued research to optimize intersection designs with intelligent systems, advocating for integrated approaches that combine VZ and I2V principles to achieve safer urban environments.
Conclusion
The paper argues powerfully for the integration of infrastructure intelligence as a pivotal strategy for enhancing intersection safety. By employing I2V communication to deliver critical phase, timing, and blind zone data, intersections can become significantly less hazardous spots for AVs, cyclists, and pedestrians alike. This approach not only complements existing safety measures but also promises an enduring and adaptable solution to intersection challenges.
Overall, "Making intersections safer with I2V communication" contributes significantly to the dialogue on urban traffic safety, inspiring further exploration and deployment of intelligent transportation systems.

