GentleHumanoid: Learning Upper-body Compliance for Contact-rich Human and Object Interaction
Abstract: Humanoid robots are expected to operate in human-centered environments where safe and natural physical interaction is essential. However, most recent reinforcement learning (RL) policies emphasize rigid tracking and suppress external forces. Existing impedance-augmented approaches are typically restricted to base or end-effector control and focus on resisting extreme forces rather than enabling compliance. We introduce GentleHumanoid, a framework that integrates impedance control into a whole-body motion tracking policy to achieve upper-body compliance. At its core is a unified spring-based formulation that models both resistive contacts (restoring forces when pressing against surfaces) and guiding contacts (pushes or pulls sampled from human motion data). This formulation ensures kinematically consistent forces across the shoulder, elbow, and wrist, while exposing the policy to diverse interaction scenarios. Safety is further supported through task-adjustable force thresholds. We evaluate our approach in both simulation and on the Unitree G1 humanoid across tasks requiring different levels of compliance, including gentle hugging, sit-to-stand assistance, and safe object manipulation. Compared to baselines, our policy consistently reduces peak contact forces while maintaining task success, resulting in smoother and more natural interactions. These results highlight a step toward humanoid robots that can safely and effectively collaborate with humans and handle objects in real-world environments.
Paper Prompts
Sign up for free to create and run prompts on this paper using GPT-5.
Top Community Prompts
Explain it Like I'm 14
Overview: What is this paper about?
This paper introduces GentleHumanoid, a new way to control a humanoid robot so it can move safely and gently when touching people and objects. Think about actions like hugging someone, helping a person stand up, or holding a fragile balloon. The goal is to make the robot’s upper body (shoulders, elbows, and hands) feel “soft” and cooperative, not stiff and pushy, while still getting the job done.
Key questions the researchers asked
- How can a humanoid robot stay steady and follow its planned motions, but also “give” and move with you when you touch it?
- How can we make the whole upper body (not just the hands) react together in a natural, human-like way when in contact?
- How can we keep the robot’s forces within safe, comfortable limits for people and delicate objects?
How it works (explained simply)
The team mixes two ideas: motion tracking and compliance.
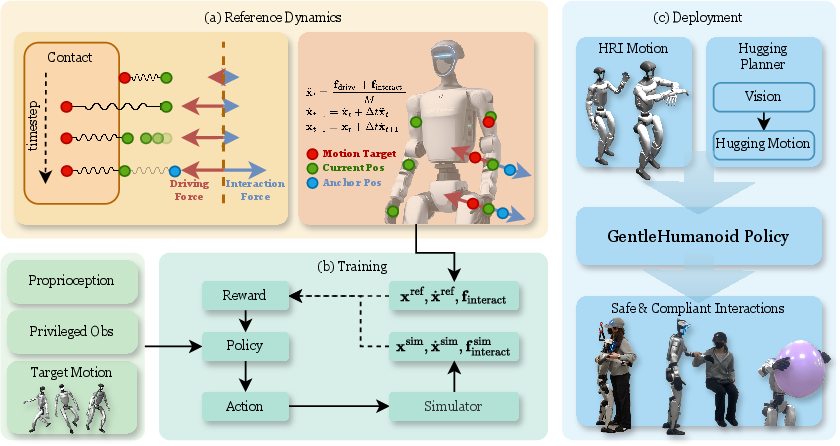
- Motion tracking: The robot tries to follow a target movement (like a “dance routine” or a hug motion) learned from human motion data.
- Compliance: The robot should yield, like a springy cushion, when someone pushes, pulls, or leans on it.
Here’s the key analogy: virtual springs and dampers
- Imagine invisible springs connecting the robot’s shoulders, elbows, and hands to their target positions. These springs pull the robot toward the planned motion, while “dampers” smooth things out so it doesn’t wobble (like a car’s shock absorbers).
- When the robot touches a person or object, more “springs” appear to represent that contact. These springs come in two types:
- Resistive contact: If the robot presses on a surface (like a chest during a hug), a spring anchors at the first touch point and gently pushes the robot back to avoid digging in.
- Guiding contact: If a person pushes or pulls the robot’s arm, the spring pulls toward a realistic human posture (sampled from real human motion data). This keeps the shoulder, elbow, and wrist moving together naturally instead of fighting each other.
Adjustable safety limit (a “force speed limit”)
- The robot caps how hard it’s allowed to push, like a speed limit for force. Lower limits make it extra gentle (good for hugs or balloons). Higher limits allow firm help (good for sit-to-stand support). This limit can be changed per task and is built into training, so the robot learns to respect it.
Training and transfer to the real robot
- The policy (a learned controller) is trained in simulation with lots of different contact situations created by those virtual springs, so it experiences gentle and strong pushes from many directions.
- A “teacher–student” setup helps move from simulation to the real robot. The teacher gets extra info during training (like the exact simulated contact forces), and the student learns to act well using only the sensors that will be available in the real world.
- The final policy runs on a real Unitree G1 humanoid robot.
What did they test and what did they find?
They compared GentleHumanoid to two baselines:
- A regular tracking policy (stiff, not trained for contact)
- A policy trained to handle forces only at the end-effectors (the hands), not the whole upper body
They ran tests in simulation and on the real robot. Here’s what happened:
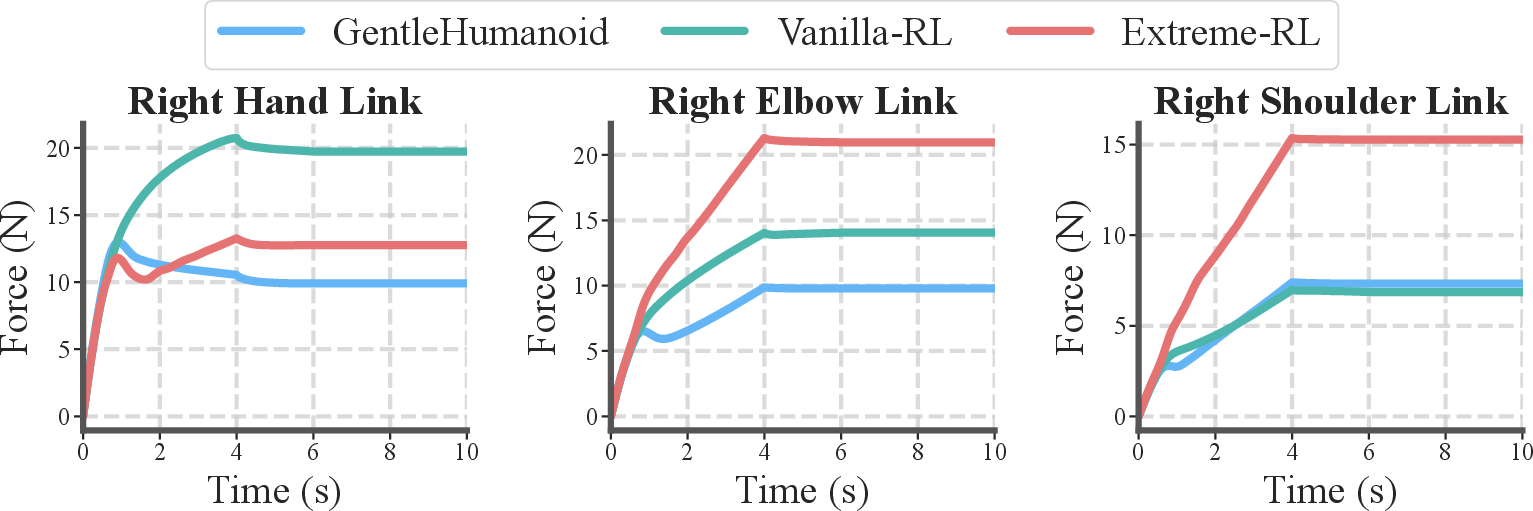
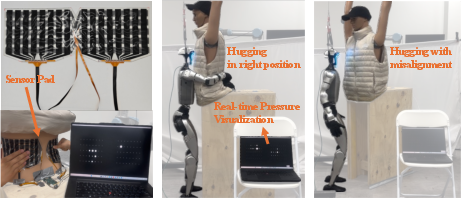
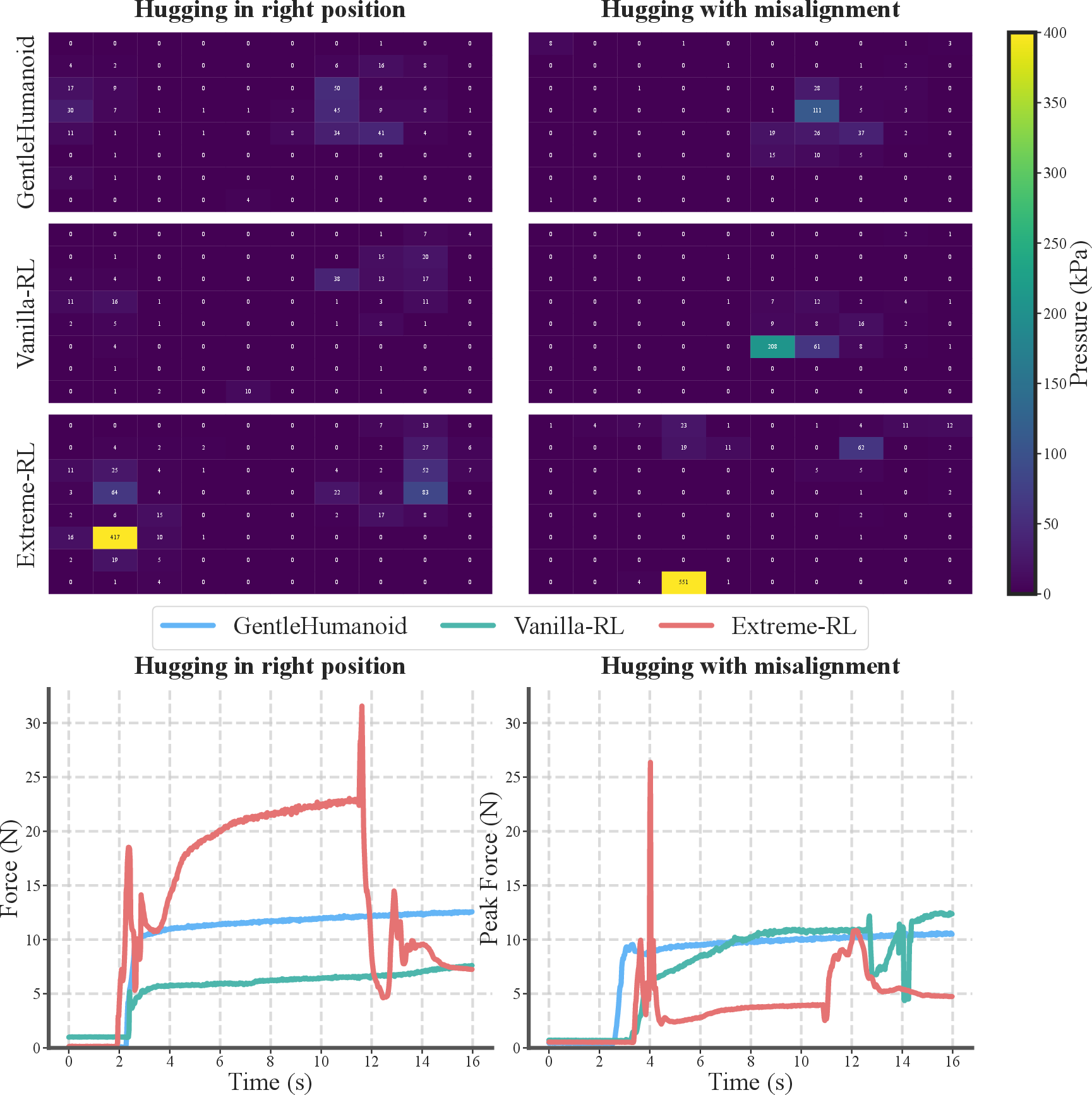
- Hugging:
- GentleHumanoid kept contact forces lower and smoother at the hand, elbow, and shoulder.
- Even when the hug was slightly misaligned, it stayed gentle and stable.
- Pressure sensors on a mannequin’s torso showed GentleHumanoid spread forces more evenly, avoiding sharp peaks.
- Sit-to-stand assistance:
- With a higher force limit, the robot could give firmer help while still staying within safe bounds.
- It coordinated the shoulder, elbow, and hand to support the person more naturally.
- Balloon handling:
- With a low force limit (e.g., 5 N), GentleHumanoid held a balloon without popping or collapsing it.
- Baselines squeezed too hard or lost balance.
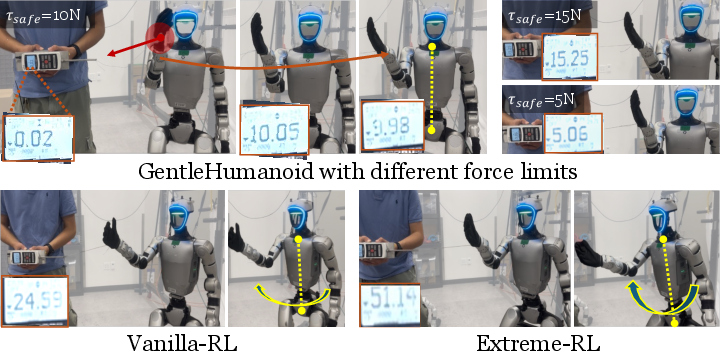
- Static pushing test (someone pushing the robot’s wrist):
- GentleHumanoid “went with the flow,” moving the arm rather than resisting, and kept forces near the set limit.
- Baselines were stiff and required much higher peak forces to move the arm, sometimes shifting the torso and risking imbalance.
Why this matters:
- Lower and more stable forces mean safer, more comfortable contact with people.
- Coordinated whole-arm compliance feels more natural and predictable than only controlling the hands.
What’s the bigger impact?
If robots are going to work around people—in homes, hospitals, and public spaces—they must be safe, gentle, and still helpful. GentleHumanoid shows a practical path toward that:
- It turns “don’t touch the robot” into “it’s okay to touch the robot,” because the robot will yield appropriately.
- Tasks like caregiving (helping someone stand), comforting (hugging), and handling soft or fragile items become more reliable.
- The adjustable force limit makes the same robot suitable for both soft and firm interactions, depending on the situation.
A note on limitations and future directions
- The contact modeling uses virtual springs and human motion data; real human tissue and friction are more complex. Adding tactile sensors could make control even more precise.
- Sometimes small force overshoots appear in the real world due to differences from simulation; better sensing would help.
- They demonstrated an autonomous, shape-aware hug using a camera to estimate a person’s body shape, but fully replacing motion-capture with vision for all steps would make it more practical.
In short, GentleHumanoid teaches humanoid robots to be helpful and “soft” when they touch people and objects, making their movements feel more like a caring human partner and less like a rigid machine.
Knowledge Gaps
Knowledge gaps, limitations, and open questions
Below is a single, concise list of what remains missing, uncertain, or unexplored in the paper, framed to be actionable for future research.
- Real-contact physics modeling: The unified spring formulation omits friction, shear, torsion, hysteresis, and viscoelastic properties of human tissue and deformable objects, as well as sliding/rolling contact and evolving contact patches; develop models and training that incorporate these effects and validate against measured human–robot contact data.
- Contact-type inference and online adaptation: Resistive vs guiding contacts are assumed during training but not inferred at deployment; devise perception or tactile-driven classifiers to detect contact type and switch compliance strategies online.
- Closed-loop force control with sensing: The student policy lacks tactile/force sensing inputs; investigate integration of skin/pressure arrays, force–torque sensors, or joint torque observers to enable feedback regulation of normal and shear forces, reduce overshoot, and respect per-link safety constraints.
- Personalized and context-aware safety thresholds: A single global threshold τsafe (5–15 N) is used; explore per-link, per-contact-area, per-body-region thresholds, user-specific comfort preferences, and task/phase-adaptive scheduling (e.g., state machines or policy-conditioned thresholds).
- Scaling to higher supportive forces: Training force magnitudes (0–25 N) and demos focus on gentle interactions; evaluate and adapt the approach for assistance scenarios requiring sustained higher forces (e.g., >50–100 N) while maintaining safety through accurate contact-area estimation and distributed force control.
- Lower-body and whole-body compliance: The method emphasizes upper-body links (shoulder, elbow, wrist); extend to lower-body and torso contact (e.g., hip, thigh, chest) and foot–ground multi-contact settings to handle tasks like carrying, bracing, and pushing with distributed contacts.
- Sim-to-real gap quantification and mitigation: Occasional real-world overshoot (1–3 N) is reported but not analyzed; perform systematic system identification, domain randomization, and actuator modeling (backlash, friction, latency) to reduce discrepancies and provide robustness bounds.
- Stability and safety guarantees: There is no analysis of passivity, dissipativity, or stability when RL tracking interacts with impedance references; derive conditions or controllers (e.g., energy tanks, passive augmentation) that guarantee safe behavior under unknown external contacts.
- Kinematic constraint enforcement: The optional kinematic-chain constraint force is disabled; assess whether explicit constraints (fixed segment lengths, joint limits) within the reference dynamics improve physical plausibility and reduce anatomically inconsistent force couplings.
- Hyperparameter sensitivity and auto-tuning: Virtual mass (M=0.1 kg), Kp/Kd, and spring stiffness ranges (5–250) are fixed without sensitivity analysis; study their effects on compliance, stability, and task success, and explore automatic tuning or learning of impedance parameters per link.
- Anchor sampling strategy: Guiding anchors are sampled from posture datasets near current states; evaluate alternative strategies (learned anchor distributions, generative models, intent-conditioned sampling) and quantify how anchor selection affects coordination and compliance.
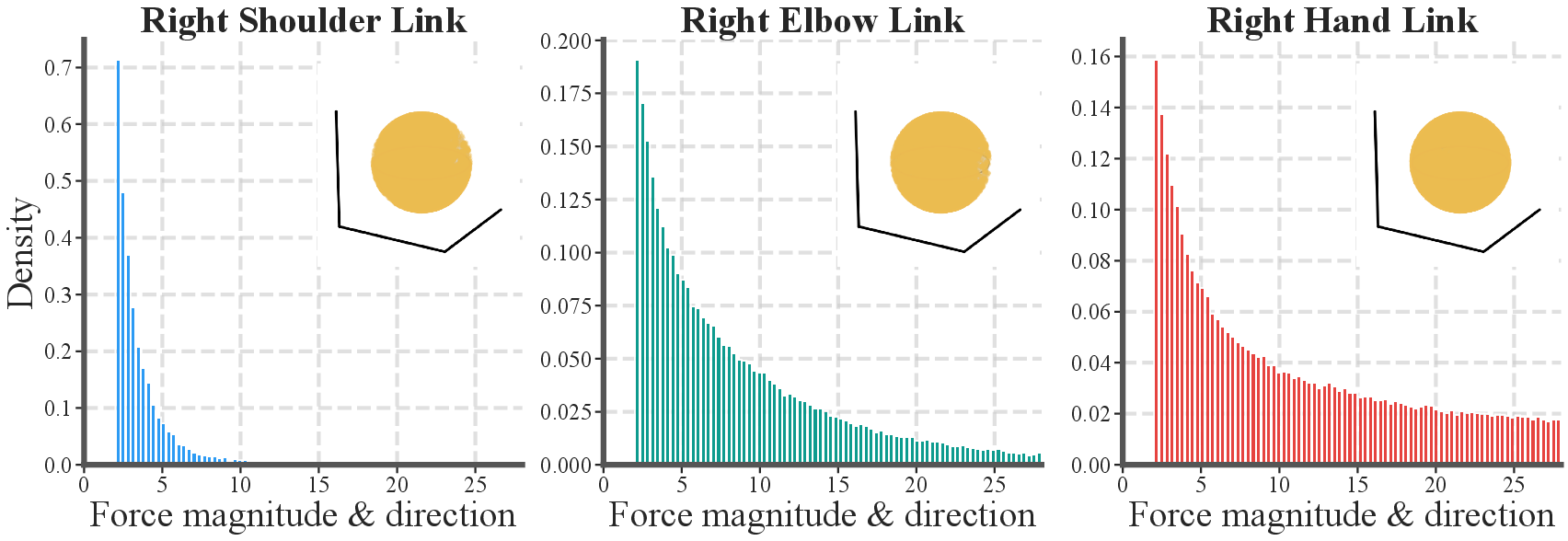
- Dataset coverage and bias: Training relies on ~25 hours of retargeted human motion with limited shoulder-force variation; curate or record HRI datasets with explicit contact labels and measured forces to correct distributional biases and improve coverage of atypical contact scenarios (e.g., dancing, lifting, crowding).
- Multi-contact concurrency and transitions: Active-contact sets are resampled every 5 s; investigate more realistic, rapid transitions, simultaneous multi-point contacts, and contact graph changes, and analyze policy behavior under fast contact events.
- Reward ablations and contribution analysis: The paper introduces compliance rewards (reference dynamics and force tracking, unsafe force penalty) but lacks ablation studies; quantify each term’s impact on safety, compliance, and task success, and explore alternative formulations (e.g., barrier functions, risk-sensitive objectives).
- Real-time contact onset detection: Resistive contact anchors depend on the “initial contact point,” yet deployment lacks explicit contact detection; implement and benchmark contact onset/offset detection using tactile or kinematic cues to correctly anchor resistive springs.
- Vision pipeline autonomy and robustness: Autonomous hugging uses MoCap for location and single-image shape estimation; replace markers with robust, occlusion-aware multi-modal perception (RGB-D, multi-view, segmentation) and evaluate performance across lighting, clothing, and pose variability.
- Quantitative evaluation breadth: Real-world tests use a mannequin and limited scenarios; conduct user studies with diverse participants to measure comfort, acceptability, trust, and objective metrics (pressure distribution, force rate, EMG, balance perturbations) across tasks and misalignments.
- Hardware generalization and control mode: Results are on Unitree G1 with joint-space PD; test on other humanoids (torque-controlled, variable-stiffness actuators) and compare joint vs torque control for compliance fidelity and safety.
- Autonomous locomotion under contact: Integration is shown with locomotion teleoperation; extend to autonomous planning and execution of contact-rich tasks where locomotion and compliant upper-body interactions co-occur (e.g., walking hugs, carrying while moving).
- Intent and high-level coordination: Guiding contacts are not linked to human intent; incorporate intent estimation (pose, force patterns, language cues) and high-level reasoning to select motions and compliance settings dynamically.
- Pressure sensing calibration and ground-truthing: The custom pad calibration assumes ~6×6 mm texels and localized contacts; validate calibration under curved surfaces, multi-texel contact, temporal drift, and cross-talk, and standardize pressure-to-force mapping.
- Trade-offs between tracking and compliance: Lower τsafe increases compliance but may degrade task tracking and balance; characterize the Pareto frontier and design controllers/policies that explicitly optimize for compliance–tracking trade-offs.
- Interaction force prediction accuracy: The teacher uses both predicted and simulated interaction forces, but prediction error is not reported; quantify prediction accuracy and its effect on student performance and safety.
- Long-horizon performance: The paper mentions future long-horizon interactions; evaluate stability, drift, and cumulative safety violations over extended tasks with evolving contacts and human behaviors.
Practical Applications
Overview
Below are practical applications derived from the paper’s findings and innovations—namely, an RL-based whole-body control policy with upper-body compliance, unified spring-based modeling of resistive and guiding contacts across shoulder–elbow–wrist, and tunable safety-aware force thresholds—validated on a Unitree G1 for hugging, sit-to-stand assistance, and fragile object handling. Applications are grouped by deployment horizon and tagged with relevant sectors, with assumptions and dependencies noted to clarify feasibility.
Immediate Applications
The following can be piloted or deployed now in labs, prototyping environments, and controlled operational settings with existing humanoid platforms.
- Gentle physical human–robot interactions on existing humanoids
- Sectors: healthcare, eldercare, hospitality, retail, entertainment
- Use cases: safe handshakes (~5 N), comfortable hugging (~5–15 N), sit-to-stand assistance with multi-link support (hands, elbows, shoulders)
- Tools/products/workflows: “GentleHumanoid” compliance policy module; operator- or task-level force-limit slider (5–15 N); pre-defined motion libraries for hugs and transfers
- Assumptions/dependencies: humanoid with reliable low-level PD control and sufficient upper-body actuation; supervisory safety oversight; trained policy retargeted to the specific robot; contact areas and thresholds aligned with ISO/TS 15066 comfort bands
- Handling soft and deformable objects without damage
- Sectors: logistics (packaging, kitting), manufacturing (soft materials), home robotics
- Use cases: balloon handling, foam and textile positioning, gentle holding of deformable goods
- Tools/products/workflows: safety-thresholding module keeping contact forces within 5–15 N; multi-link compliance for distributed contacts (wrist–elbow–shoulder)
- Assumptions/dependencies: task-specific force bands per material; optional tactile sensing to reduce overshoot; operator training and fallback strategies
- Safer teleoperation with built-in compliance
- Sectors: healthcare (remote caregiver assistance), education (robotics demos), field service
- Use cases: remote locomotion and upper-body assistance where the robot yields predictably to physical contact
- Tools/products/workflows: integration with existing teleoperation stacks (e.g., OmniH2O; future integration with TWIST); “compliance profiles” per task; safety geofencing and E-stop routines
- Assumptions/dependencies: reliable communication, latency management, operator UI, environment constraints
- HRI evaluation and safety-validation workflow
- Sectors: academia, certification/testing labs, robot vendors
- Use cases: quantifying distributed contact pressures during hugs or assistance; benchmarking policies for compliance and safety
- Tools/products/workflows: 40-taxel capacitive pressure pad, calibration workflow with a motorized stage and PDMS applicator; force-gauge protocols; thresholds referenced to ISO/TS 15066 and comfort studies
- Assumptions/dependencies: sensor availability and calibration; controlled test setups; alignment with existing safety standards
- Vision-assisted, shape-aware hugging (controlled settings)
- Sectors: HRI research, therapy prototypes, entertainment
- Use cases: adapting hugging posture to the person’s body shape estimated from camera input; waist-point alignment for comfortable embrace
- Tools/products/workflows: head-mounted RGB camera, body mesh estimation (e.g., BEDLAM), height scaling, waist alignment planner; optional motion capture hat for robust localization
- Assumptions/dependencies: reliable person localization (mocap or robust vision), consent and privacy controls, safety thresholds; limited autonomy without full-vision replacement of mocap
- Impedance-integrated RL training template for compliant upper-body control
- Sectors: academia, robotics startups
- Use cases: reproducing the training pipeline to add upper-body compliance to other humanoids or tasks; research on contact-rich HRI
- Tools/products/workflows: teacher–student PPO pipeline; unified spring-anchor formulation for resistive and guiding contacts; IsaacGym/MuJoCo simulation; retargeted human motion datasets (AMASS, InterX, LAFAN via GMR)
- Assumptions/dependencies: compute resources; dataset licenses; sim-to-real tuning; robot-specific dynamics and controllers
Long-Term Applications
The following require further research, scaling, productization, perception/tactile integration, and/or regulatory approval.
- Clinical-grade assistive humanoids for transfers and mobility support
- Sectors: healthcare, rehabilitation, eldercare
- Use cases: sit-to-stand assistance, gentle repositioning in beds or chairs, compliant co-walking support
- Tools/products/workflows: FDA/CE-certified “compliance-aware caregiver” robot; redundant sensing (tactile arrays on arms/torso); fail-safe control and event logging
- Assumptions/dependencies: clinical trials, human-subject IRB, robust tactile feedback to eliminate overshoot, regulatory approvals, liability frameworks, caregiver training
- Personalized therapeutic hugging and companionship without mocap
- Sectors: mental health, autism therapy, entertainment venues
- Use cases: customized, comfort-aware physical engagement for emotional support and sensory therapies
- Tools/products/workflows: robust monocular RGB-D body-shape estimation; dynamic compliance tuning per body region; consent and privacy tooling
- Assumptions/dependencies: high-reliability vision replacing mocap; social acceptability studies; clear data governance; safeguarding policies
- Multi-human, multi-contact co-manipulation of large flexible objects
- Sectors: manufacturing (fabrics, composites), logistics (mattresses, soft goods)
- Use cases: humanoid–human teams moving bulky or deformable items with distributed upper-body contacts
- Tools/products/workflows: extended datasets with diverse contact scenarios (shoulder/back/torso); friction and viscoelastic contact modeling; compliance orchestration across teams
- Assumptions/dependencies: scalability to full-body compliance, perception of global object state, safety zoning, workforce training
- Standardization and policy for whole-body contact safety
- Sectors: regulation/policy, insurance, procurement
- Use cases: task- and body-region-specific force/pressure bands for safe HRI; certification suites using pressure pads and dynamic thresholds
- Tools/products/workflows: standardized test rigs and reporting formats; recommended comfort bands per contact area; auditing workflows for vendors
- Assumptions/dependencies: consensus-building among standards bodies (ISO extensions), shared datasets for evidence, cross-industry adoption
- Full-body teleoperation and shared autonomy with compliance
- Sectors: disaster response, hospital logistics, industrial inspection
- Use cases: combining operator intent with compliant control for safe contact in cluttered, dynamic environments
- Tools/products/workflows: shared-autonomy blending of operator commands and impedance references; force-aware guardrails; intent inference from operator inputs
- Assumptions/dependencies: robust communications, environment perception at scale, generalized locomotion and manipulation, operator training
- Consumer home robots for caregiving and gentle chores
- Sectors: home robotics
- Use cases: bed-making, laundry folding with soft garments, gentle assistance to older adults
- Tools/products/workflows: “gentle mode” profiles exposed via a mobile app; task libraries calibrated for household objects; safety management for children/pets
- Assumptions/dependencies: affordability, battery life and reliability, broad generalization across homes, long-term human acceptance and trust
- Research ecosystem for compliant HRI
- Sectors: academia, consortia
- Use cases: sim-to-real benchmarks for compliance; contact-rich human–humanoid datasets; tactile-sensing integration methods
- Tools/products/workflows: shared data formats and evaluation protocols; multi-site studies; open-source compliance baselines and sensors
- Assumptions/dependencies: cross-lab coordination, funding, IRB approvals, reproducibility standards
Glossary
- admittance control: A control strategy that commands motion in response to measured forces, complementing impedance control for safe contact. "To address this, recent works have integrated impedance or admittance control into RL~\cite{portela2024learning,facet,unifp} or attempted to learn forceful loco-manipulation implicitly~\cite{falcon}."
- AMASS: Archive of Motion Capture as Surface Shapes; a large corpus of human motion data used for training and retargeting. "Specifically, we use GMR~\cite{ze2025gmr} to retarget the AMASS~\cite{AMASS}, InterX~\cite{xu2023interx}, and LAFAN~\cite{harvey2020robust} datasets"
- critical damping: The damping level that returns a system to equilibrium without oscillation, maximizing speed without overshoot. "To ensure stable and smooth behavior, we set the damping to the critical value, ."
- end-effector: The terminal part of a robot manipulator (e.g., hand or wrist) that directly interacts with the environment. "Existing impedance-augmented approaches are typically restricted to base or end-effector control and focus on resisting extreme forces rather than enabling compliance."
- force-adaptive methods: Control approaches that regulate interaction forces (e.g., impedance or admittance) to achieve safe, adaptable contact. "To address the aforementioned issue of robust and safe contact, classical force-adaptive methods such as impedance and admittance control regulate interaction forces and have been extended to whole-body frameworks~\cite{sombolestan2023hierarchical,sombolestan2024adaptive,rigo2024hierarchical}."
- force-thresholding: Limiting or scaling commanded forces to remain within safety bounds during training and deployment. "we apply force-thresholding during training, with adjustable limits at deployment based on task requirements."
- GMR: A motion retargeting method used to map human motion datasets onto the robot’s morphology. "Specifically, we use GMR~\cite{ze2025gmr} to retarget the AMASS~\cite{AMASS}, InterX~\cite{xu2023interx}, and LAFAN~\cite{harvey2020robust} datasets"
- guiding contact: Contact forces applied by external agents that steer the robot toward desired postures. "Guiding contact: Forces applied by an external agent, such as a human pushing or pulling the humanoidâs arm."
- impedance control: A control paradigm that regulates the dynamic relationship between motion and force via stiffness and damping, enabling compliant interaction. "We introduce GentleHumanoid, a framework that integrates impedance control into a whole-body motion tracking policy to achieve upper-body compliance."
- InterX: A dataset of human–human interaction motions used to diversify training scenarios. "Specifically, we use GMR~\cite{ze2025gmr} to retarget the AMASS~\cite{AMASS}, InterX~\cite{xu2023interx}, and LAFAN~\cite{harvey2020robust} datasets"
- ISO/TS 15066: An industrial safety specification that defines force and pressure limits for collaborative robots. "These values are benchmarked against both ISO/TS~15066~\cite{ISO/TS15066:2016} safety ceilings and comfort studies."
- kinematic chain: A linked sequence of joints and links whose geometry and constraints define a robot’s motion. "upper-body kinematic chain, where multiple links including shoulders, elbows, and hands may be in contact simultaneously."
- kinematic consistency: Ensuring forces and motions respect anatomical or mechanical constraints across connected joints. "This formulation ensures kinematically consistent forces across the shoulder, elbow, and wrist, while exposing the policy to diverse interaction scenarios."
- LAFAN: A human motion dataset (LaFAN) commonly used in animation and robotics for learning realistic movements. "Specifically, we use GMR~\cite{ze2025gmr} to retarget the AMASS~\cite{AMASS}, InterX~\cite{xu2023interx}, and LAFAN~\cite{harvey2020robust} datasets"
- loco-manipulation: Integrated locomotion and manipulation tasks performed simultaneously by a robot. "However, these approaches are restricted to base or end-effector control and typically emphasize resisting extreme forces rather than supporting compliant interaction." and "attempted to learn forceful loco-manipulation implicitly~\cite{falcon}."
- MuJoCo: A physics engine widely used for accurate simulation of robot dynamics and contacts. "Physics engines such as MuJoCo and IsaacGym can generate contact forces at colliding surfaces"
- PD controller: A proportional–derivative feedback controller used for tracking joint targets with stability and responsiveness. "All and terms above denote 3D Cartesian link states (in the root frame), while the policy produces actions in joint space that are tracked by low-level joint PD controllers."
- PDMS: Polydimethylsiloxane; a compliant silicone used as an applicator for sensor calibration. "For sensor calibration, a motorized stage with a PDMS applicator was used to map normalized sensor values to ground-truth pressures measured by a force gauge."
- PPO: Proximal Policy Optimization; a reinforcement learning algorithm for training policies with stability constraints. "We adopt the same teacher-student architecture and training procedure from prior work~\cite{facet}, and train both policies with PPO~\cite{PPO}."
- projected gravity: The gravity vector represented in the robot’s root coordinate frame for use in control. " is the root angular velocity; and is gravity expressed in the robot's root frame (projected gravity)."
- proprioception: Internal sensing of the robot’s own states (e.g., joint positions/velocities) used as observations. "the policy receives proprioception, privileged observations, and target motions"
- reference dynamics: A simulated dynamics model that defines the compliant target behavior the policy should reproduce. "This impedance-based reference dynamics system specifies the compliant behavior the policy is trained to reproduce."
- resistive contact: Contact that generates restoring forces opposing penetration or displacement at the contact point. "Resistive contact: Forces generated when the humanoid itself presses against a human or object."
- root frame: The coordinate frame attached to the robot’s base/root, used to express positions and velocities. "All link positions and velocities $\dot{\bm{x}$ are 3D Cartesian quantities expressed in the robot's root frame."
- semi-implicit Euler integration: A numerically stable variant of Euler’s method for integrating dynamics with better handling of stiff systems. "To incorporate the impedance-based reference dynamics, we simulate the model using semi-implicit Euler integration, with a fixed time step of $0.005$ s:"
- sim-to-real transfer: Techniques for deploying policies trained in simulation onto real robots while retaining performance. "We employ a two-stage teacherâstudent training framework for sim-to-real transfer."
- spring anchor: The fixed or sampled point toward which a virtual spring exerts force in the interaction model. "Resistive contact, when the humanoid presses against a surface, modeled by fixing the spring anchor at the initial contact point to generate restoring forces"
- spring–damper system: A mechanical model combining elastic and viscous elements to regulate motion and force. "The force is modeled as a virtual springâdamper system:"
- taxel: A tactile “pixel” in a pressure or touch sensor array that measures local contact. "Quantitative tests use commercial force gauges and conformable, customized waist-mounted pressure sensing pads with 40 calibrated capacitive taxels"
- teacher–student training framework: A training setup where a privileged teacher policy guides a student policy for deployment. "We employ a two-stage teacherâstudent training framework for sim-to-real transfer."
- teleoperation: Remote control of a robot’s actions by a human operator, often mapping human motion to robot motion. "While this work focuses on locomotion teleoperation, extending \modelnametext to full-body teleoperation such as TWIST~\cite{ze2025twist} is an important direction for future work."
- Unitree G1 humanoid: A commercial humanoid robot platform used for real-world evaluation. "We deploy our whole-body control policy on the Unitree G1 humanoid to evaluate compliance in real-world interactions."
- virtual mass: An artificial mass parameter in impedance models that shapes dynamic responses without being a physical mass. "M is a scalar virtual mass (kg) per link."
- whole-body control: Coordinated control of all joints and limbs of a robot to achieve complex, integrated behaviors. "Whole-body control for humanoid robots is a long-standing challenge in robotics."
Collections
Sign up for free to add this paper to one or more collections.

