- The paper introduces an interaction-aware neural network-enhanced MPPI framework that predicts surrounding vehicle behaviors to optimize trajectory planning.
- It leverages spline-based priors to guide control sampling, improving lane-changing maneuvers and boosting sample diversity.
- Experimental results demonstrate superior merge performance and reduced collision risks compared to traditional non-interactive methods.
IANN-MPPI: Interaction-Aware Motion Planning for Autonomous Vehicles
Introduction
The paper "IANN-MPPI: Interaction-Aware Neural Network-Enhanced Model Predictive Path Integral Approach for Autonomous Driving" addresses the challenges of motion planning for Autonomous Vehicles (AVs) in dense traffic. Traditional methods often lead to conservative behavior due to their inability to anticipate interactions with surrounding agents. The proposed framework, IANN-MPPI, enhances the Model Predictive Path Integral (MPPI) approach by integrating interaction-aware neural networks to predict the future behaviors of surrounding vehicles in response to the AV's maneuvers. This integration aims to address the limitations of non-interactive predictions by enabling more dynamic and efficient trajectory planning.
Interaction-Aware Neural Network-Enhanced MPPI
The core innovation of the IANN-MPPI framework lies in its ability to predict interactions by coupling the MPPI control with a neural network-based prediction model. This model forecasts the reactions of surrounding vehicles to each sampled control sequence, thereby enabling ego-vehicle trajectory planning that accounts for the dynamic traffic environment.
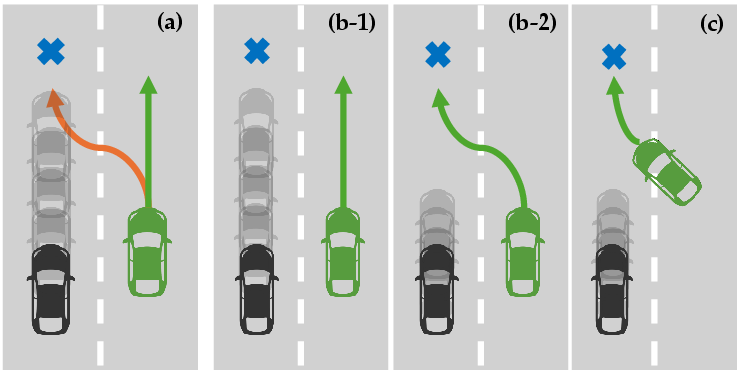
Figure 1: Illustrative example of a merging scenario using interaction-aware MPPI.
To facilitate efficient lane changes, a spline-based prior is introduced to guide the sampling distribution of the MPPI, thus enhancing lane-changing behaviors. The framework's ability to predict reactive behaviors dynamically is demonstrated in Figure 1, which contrasts traditional decoupled prediction-planning pipelines with the proposed interaction-aware approach.
The study builds on existing literature in interactive motion planning and sampling-based optimization techniques. While previous works have employed game-theoretic models and reinforcement learning to incorporate interaction behaviors, these approaches often lack real-time applicability or rely heavily on assumptions about surrounding vehicles. In contrast, the IANN-MPPI framework leverages the sample efficiency and parallelization capabilities of MPPI, coupled with neural network predictors like the SGAN model, to achieve interaction-aware planning without sacrificing real-time performance.
Technical Implementation
MPPI Control Framework
The MPPI framework operates by sampling control trajectories, evaluating their costs, and updating the sampling distribution based on importance-sampling weights. The integration of spline-based priors enhances the diversity of sampled trajectories, crucial for capturing varied interaction behaviors.
Prediction Model Integration
An ML-based trajectory predictor is trained to anticipate the interactive future trajectories of surrounding vehicles. This prediction is conditioned on both historical data and candidate ego-vehicle trajectories, facilitating the capture of complex interaction dynamics.
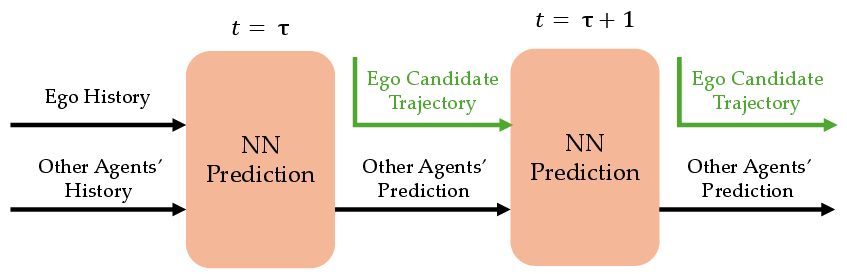
Figure 2: Rollout of the prediction model for generating ego-conditioned predictions.
Algorithmic Structure
The algorithm samples control sequences around spline-based motion priors and evaluates the predicted trajectories of surrounding vehicles for each sample. The cost associated with each trajectory is computed, followed by an optimization step using Biased-MPPI tailored for arbitrary sampling distributions.
Experimental Evaluation
The experimental setup simulates various traffic environments, employing different behavioral models for surrounding vehicles such as probabilistic, uncooperative, and cooperative IDM variants.
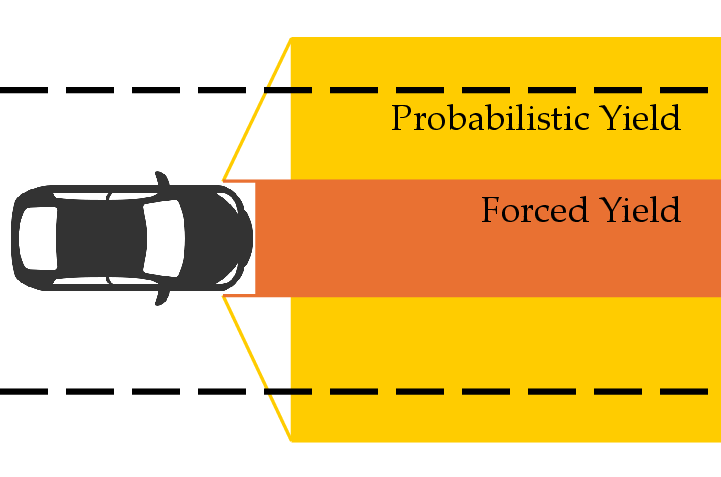
Figure 3: Forced yield zone and probabilistic yield zone of surrounding vehicles.
IANN-MPPI demonstrates superior performance in scenarios involving complex interactions, successfully achieving merges and avoiding collisions by leveraging the interaction-aware neural network predictions. The results confirm higher success rates and reduced merge times compared to non-interaction-aware baselines.
Conclusion
The IANN-MPPI framework effectively addresses the challenges of motion planning in dense traffic by incorporating interaction-aware predictions within the MPPI control strategy. This approach not only facilitates efficient trajectory planning but also enhances the AV's ability to navigate complex traffic scenarios. Future work can explore the incorporation of uncertainty-aware prediction models to further bolster the framework's robustness in real-world conditions. Overall, IANN-MPPI represents a promising advancement in the pursuit of more autonomous and adaptive driving systems.