- The paper presents a novel MPPI control framework that integrates Sobol sequences to generate diverse trajectory options for accurate collision avoidance.
- The method employs a non-linear single-track vehicle model with Fiala tyre dynamics to closely predict vehicle behavior under varying friction conditions.
- Simulations demonstrate that the approach adapts dynamically in complex maneuvers like double lane changes and occlusions, outperforming traditional MPPI strategies.
Multi-Modal Model Predictive Path Integral Control for Collision Avoidance
Introduction
The paper "Multi-Modal Model Predictive Path Integral Control for Collision Avoidance" introduces a innovative approach in the domain of automated vehicle motion planning, focusing on collision avoidance utilizing a multi-modal Model Predictive Path Integral (MPPI) control algorithm. The method leverages Sobol sequences for sampling, combined with analytical collision avoidance solutions, to generate diverse trajectory options. This approach aims to overcome the limitations of traditional trajectory planning methods which often fall short when addressing complex, high-dimensional, and dynamically changing environments, especially under varying road surface conditions.
Methodology
Model Predictive Path Integral Control
The proposed method builds upon the MPPI control framework, a stochastic optimal control algorithm designed to handle non-linear optimization problems subject to non-linear dynamics and non-convex constraints. MPPI utilizes Monte Carlo sampling to simulate numerous control sequences over a finite time horizon and evaluates these sequences using a cost function to determine the optimal trajectory. The use of Sobol sequences, known for their uniform space coverage and scalability in high-dimensional settings, is a standout feature of this approach, enhancing the effectiveness of MPPI in exploring feasible trajectory solutions (Figure 1).
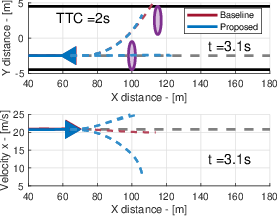
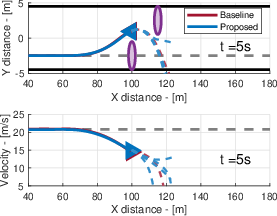
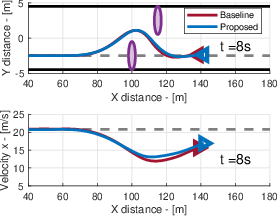
Figure 1: Visualization of trajectory exploration using Sobol sequences within the MPPI framework.
Vehicle Prediction Model
A non-linear single-track vehicle model forms the core of the prediction model, incorporating key vehicle dynamics such as lateral and longitudinal forces, yaw rate, and tyre constraints enforced via the friction circle model. The integration of a Fiala tyre model and optimal parameterization through simulations align the model's predictive capabilities with high-fidelity dynamics, essential for real-world applications where precise trajectory predictions under varying friction conditions are critical.
Results and Discussion
Double Lane Change Scenarios
High-fidelity simulations demonstrate the efficacy of the proposed multi-modal MPPI in executing complex manoeuvres such as a double lane change under both high- and low-friction conditions. The approach outperforms traditional MPPI methods by dynamically adjusting strategies, including options for evasive swerves and controlled stops, based on real-time trajectory evaluations and cost assessment.



Figure 2: Decision-making in a double lane change scenario with varying time-to-collision metrics.
In scenarios with reduced time-to-collision (TTC), the proposed method effectively switches from acceleration to braking, demonstrating robustness in maintaining stability and avoiding obstacles compared to the standard MPPI, which often fails in dynamic adaptation (Figure 2).
Occlusion and Low Friction Challenges
The flexibility of the proposed system is further highlighted in scenarios where obstacles are occluded, or road friction is significantly reduced. The multi-modal capability enables the prediction model to evaluate and choose acceleration over deceleration, showcasing its ability to adapt unlike traditional methods which often result in suboptimal maneuvers that can lead to collisions or loss of vehicle control.
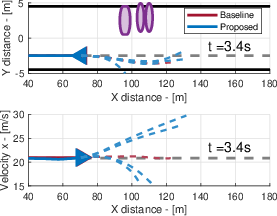
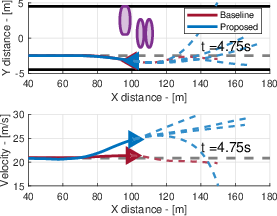
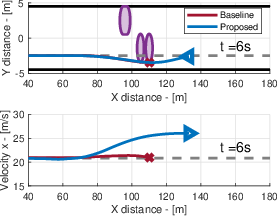
Figure 3: Adaptive multi-modal control in occlusion conditions ensures obstacle avoidance and trajectory optimization.
Conclusion
The multi-modal MPPI algorithm proposed in this research provides a comprehensive framework for collision avoidance in automated vehicles. By intelligently sampling trajectory options around various modes and incorporating prior knowledge with analytical solutions, it addresses the shortcomings of single-strategy approaches. The paper validates the approach through extensive simulations, revealing its superiority in handling diverse, complex driving scenarios, including rapid adaptations to unforeseen situations like occlusion and low friction. Future work should focus on real-world implementation and testing to further refine this promising control strategy.
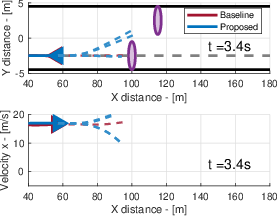
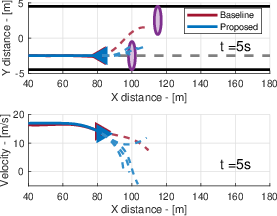
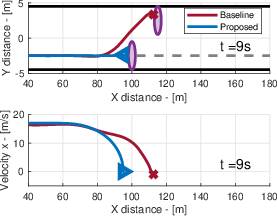
Figure 4: Summary of performance improvements and strategic advantages of the multi-modal MPPI approach in collision avoidance scenarios.