- The paper presents a framework that integrates driving style classification and dual cooperation scores to enable adaptive, safe lane change decisions in mixed traffic.
- The methodology leverages behavior cloning with inverse reinforcement learning, achieving 94.2% accuracy and 94.3% F1-score for lane change recognition.
- Results show that the IRL–MPC approach delivers faster, safer maneuvers compared to traditional rule-based and other learning-based methods.
Intention-driven Lane Change Framework for Heterogeneous Dynamic Cooperation in Mixed-traffic Environments
Introduction and Motivation
The paper addresses the challenge of autonomous vehicle (AV) lane change decision-making in mixed-traffic environments, where AVs must interact with human-driven vehicles (HVs) exhibiting diverse and unpredictable behaviors. Existing lane change algorithms often assume behavioral homogeneity or rely on static personality traits, which limits their ability to adapt to real-world traffic heterogeneity. The proposed framework integrates driving style recognition, cooperation-aware intention modeling, and reward-guided decision-making to enable AVs to execute safe and efficient lane changes that are sensitive to the intentions and styles of surrounding human drivers.
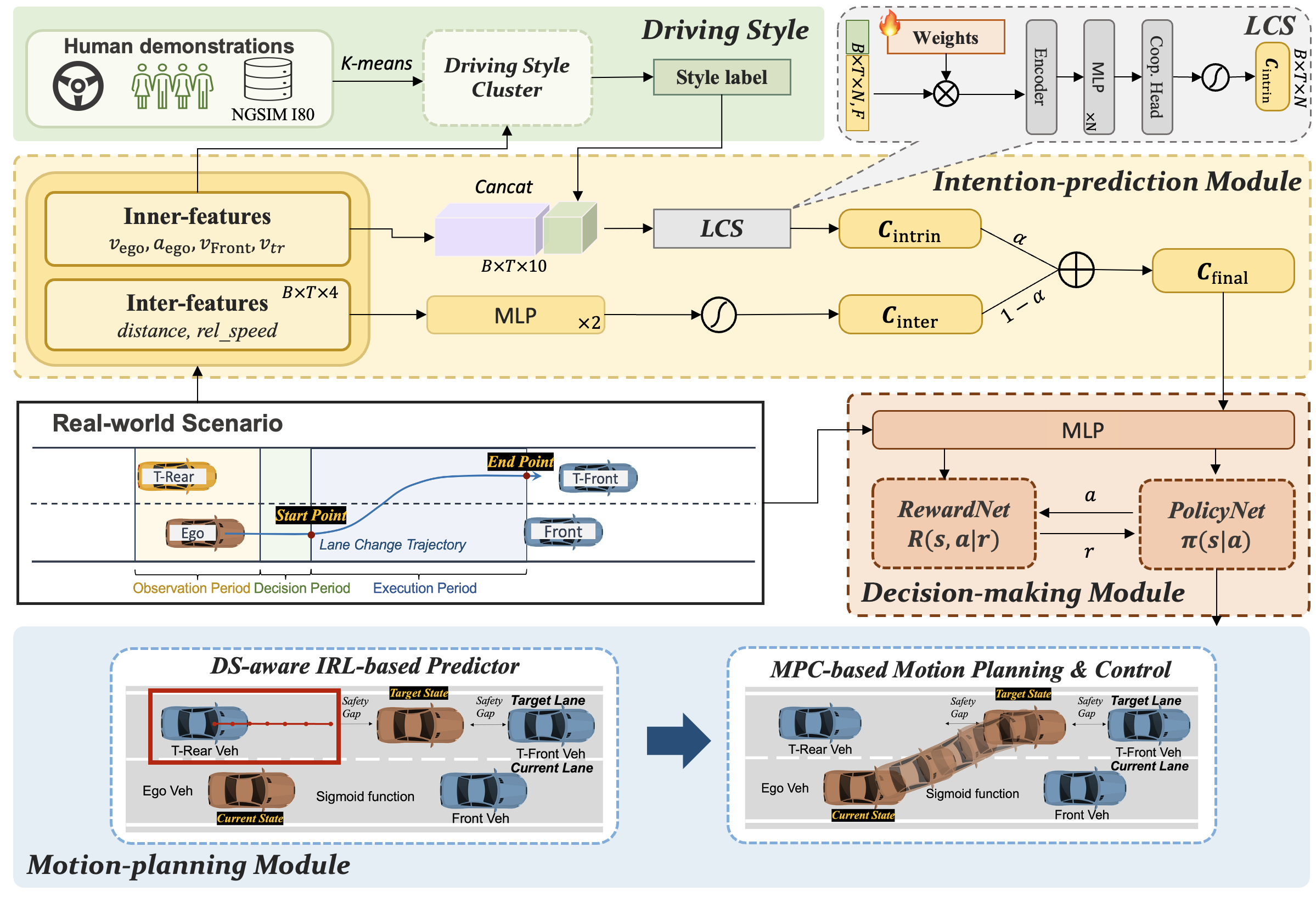
Figure 1: Overall architecture of the proposed intention-driven lane change framework, integrating driving style recognition, cooperation-aware intention prediction, decision-making, and motion-planning.
Dataset and Lane Change Episode Extraction
The NGSIM I-80 dataset is utilized for both training and evaluation. It provides high-resolution vehicle trajectories in naturalistic traffic, enabling the extraction of lane change episodes with detailed context. The data preprocessing pipeline includes filtering for passenger cars, isolating single lane change events, and segmenting trajectories into sliding windows for supervised learning.
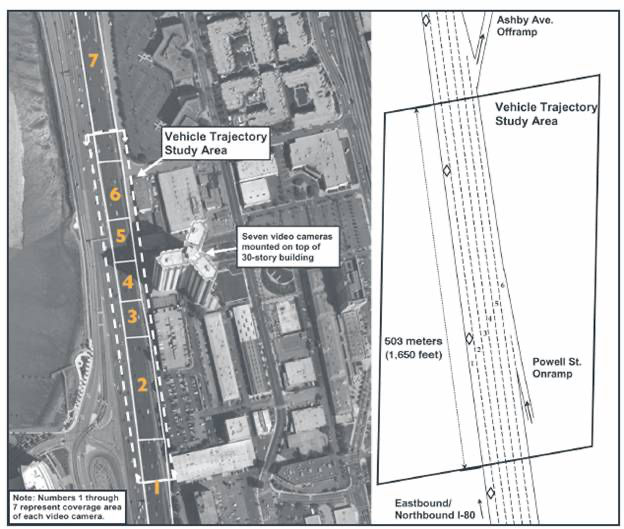

Figure 2: Illustration of the NGSIM I-80 dataset: (a) Road segment layout; (b) Roadside camera view.
A novel algorithm is introduced for lane change start and end point detection, leveraging lateral speed profiles and lane line crossing criteria to robustly identify maneuver boundaries.
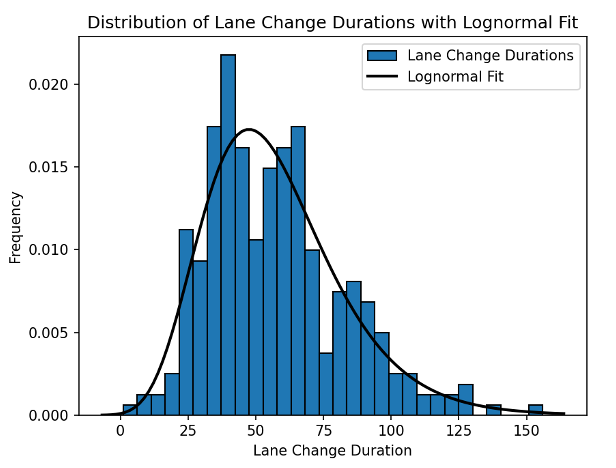
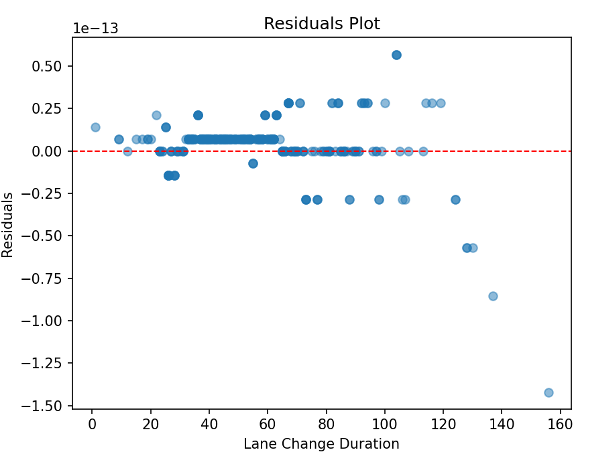
Figure 3: Analysis of lane change duration times. (a) Log-normal distribution fit of lane change durations; (b) residuals plot indicating model fit quality.
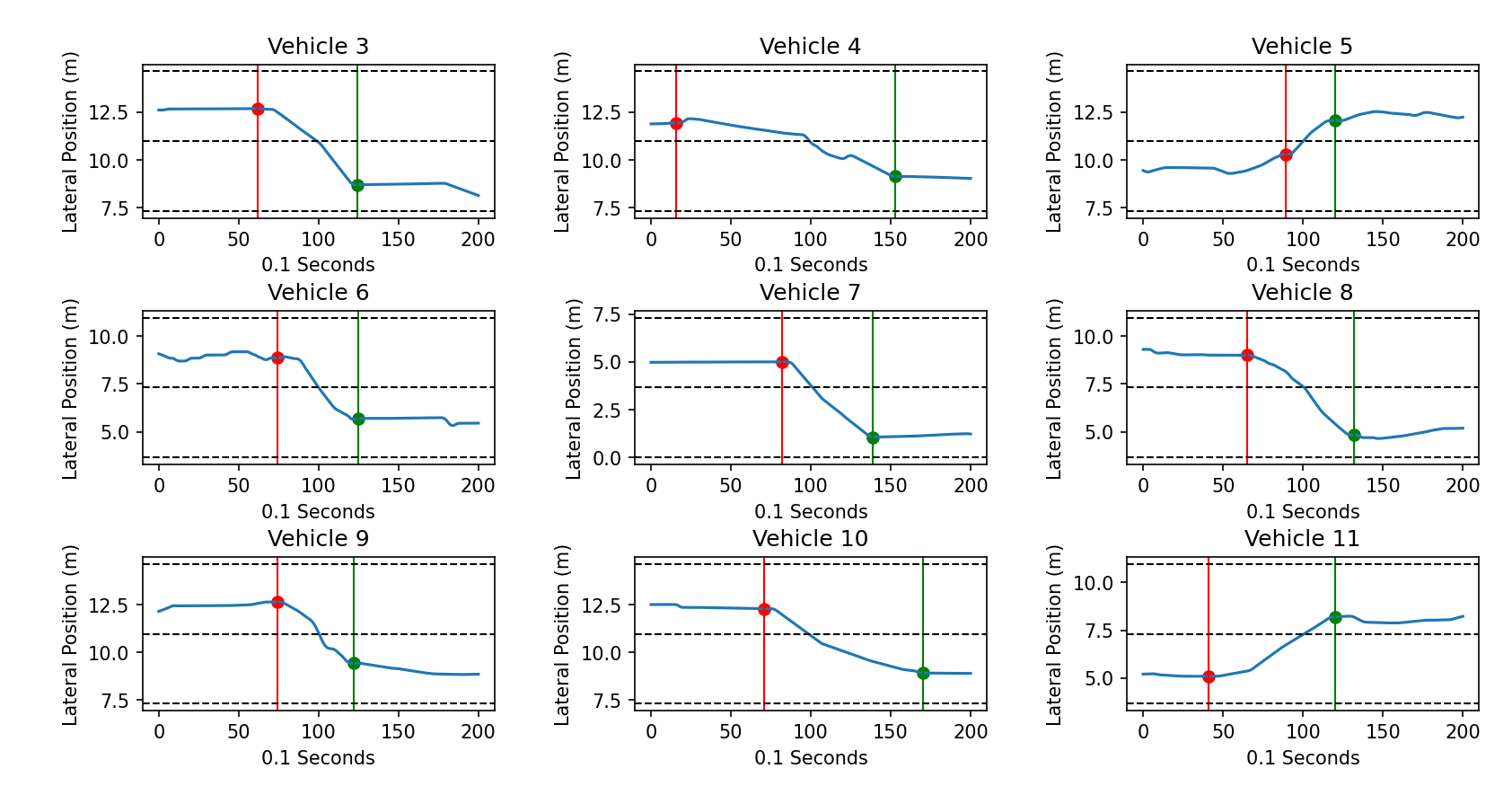
Figure 4: Performance of the lane change start and end point detection algorithm, showing spatial distribution of start (red) and end (green) points along vehicle trajectories.
Driving Style Recognition and Clustering
Driving style is operationalized via six statistical features (mean/max velocity/acceleration and their standard deviations), which are reduced by PCA and clustered using K-means into three canonical styles: aggressive, normal, and conservative. A supervised classifier is trained to recognize these styles online, providing discrete style labels for downstream intention modeling.
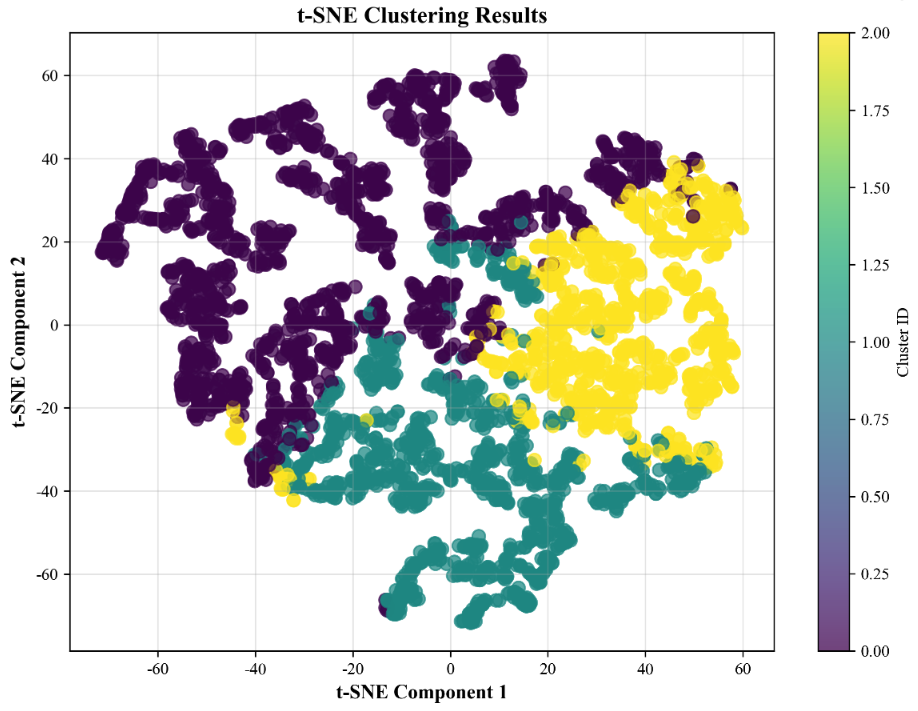
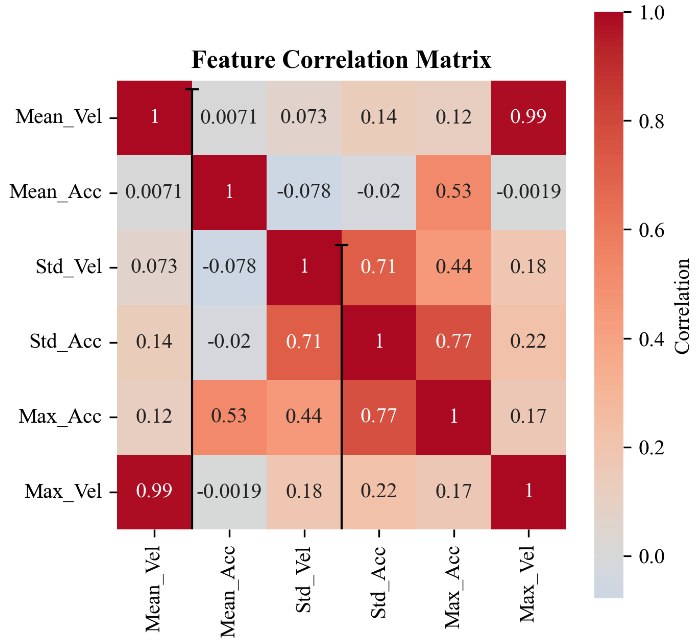
Figure 5: Analysis of driving style representation: (a) clustering results show distinct style separation; (b) feature correlation matrix highlights inter-feature dependencies.
Cooperation-aware Intention Prediction
The framework introduces a dual-perspective cooperation score:
- Learnable Cooperation Score (LCS): Encodes intrinsic cooperation tendencies conditioned on the target vehicle's driving style.
- Dynamic Cooperation Score (DCS): Captures context-dependent cooperation inferred from inter-vehicle features (relative distance, velocity).
A trainable gating mechanism fuses LCS and DCS, producing a final cooperation score cfinal that modulates the AV's lane change decision.
Decision-making via BC–IRL Integration
The decision module combines reward-weighted behavior cloning (BC) and inverse reinforcement learning (IRL):
- Policy Net: LSTM-based classifier outputs lane change probabilities, trained with a reward-weighted BCE loss.
- Reward Net: Estimates latent rewards for each action, optimized via Max-Ent IRL to recover human-like preferences.
The joint loss function integrates BC, IRL, and cooperation regularization, enabling robust and generalizable policy learning.
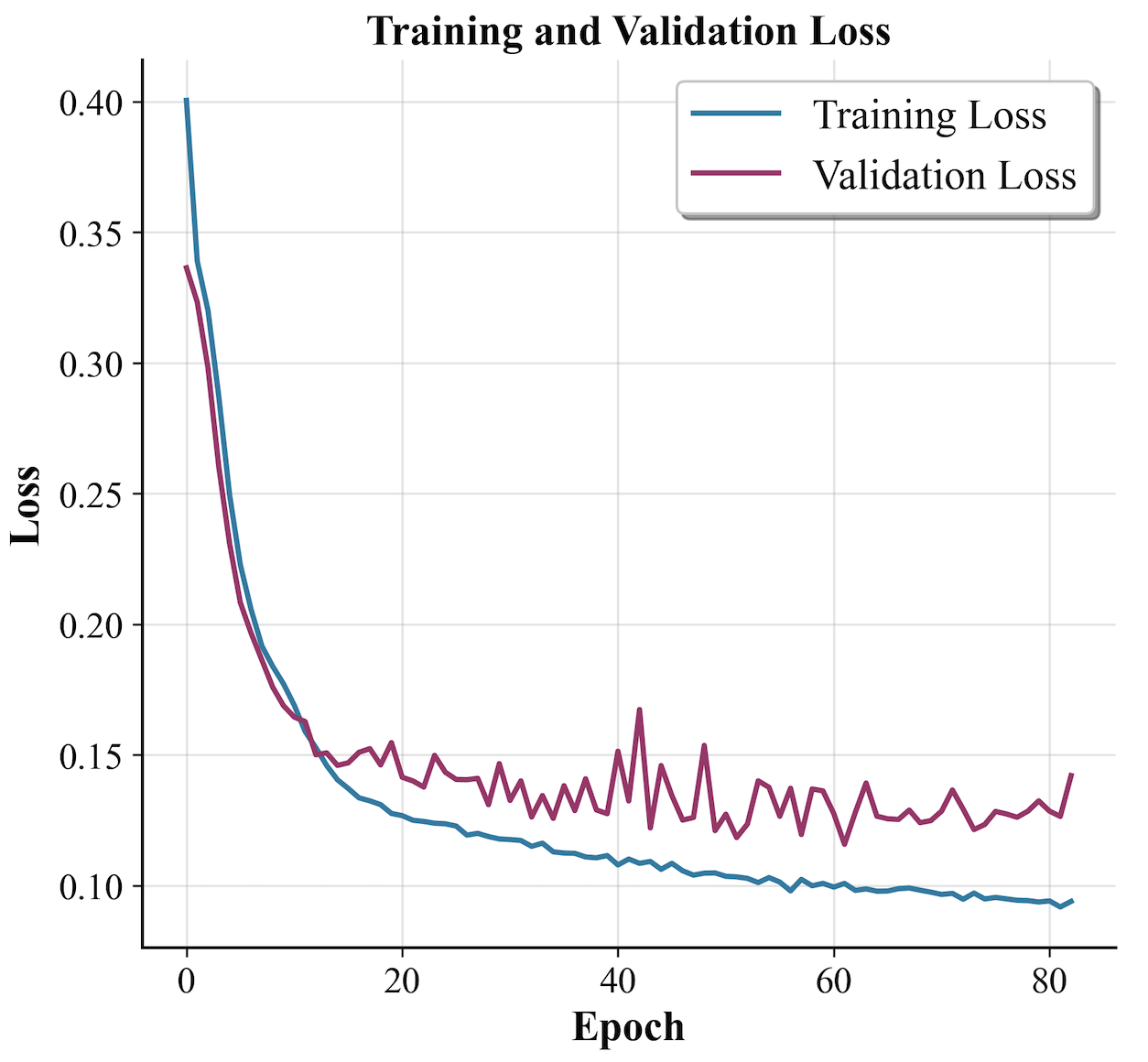
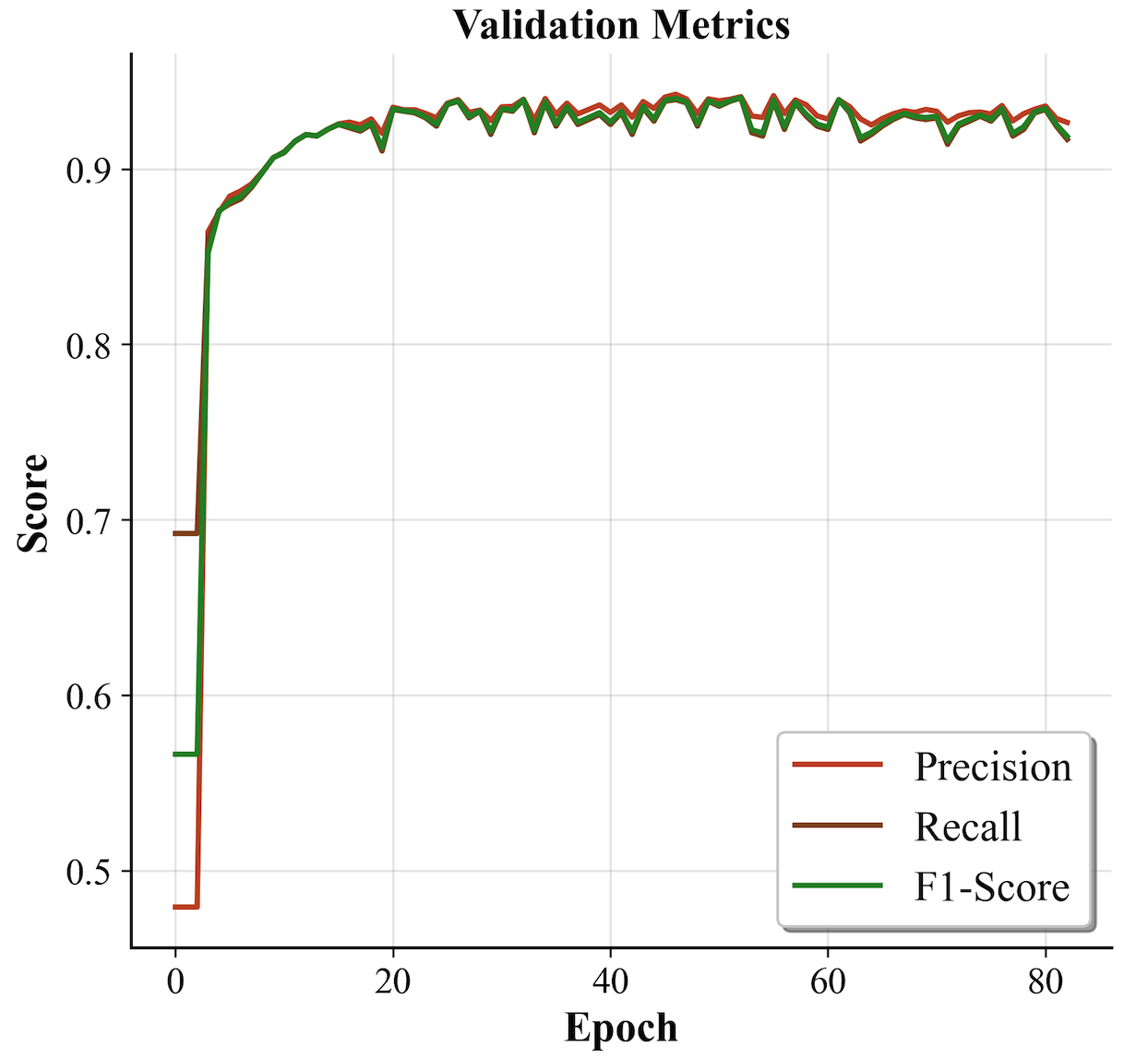
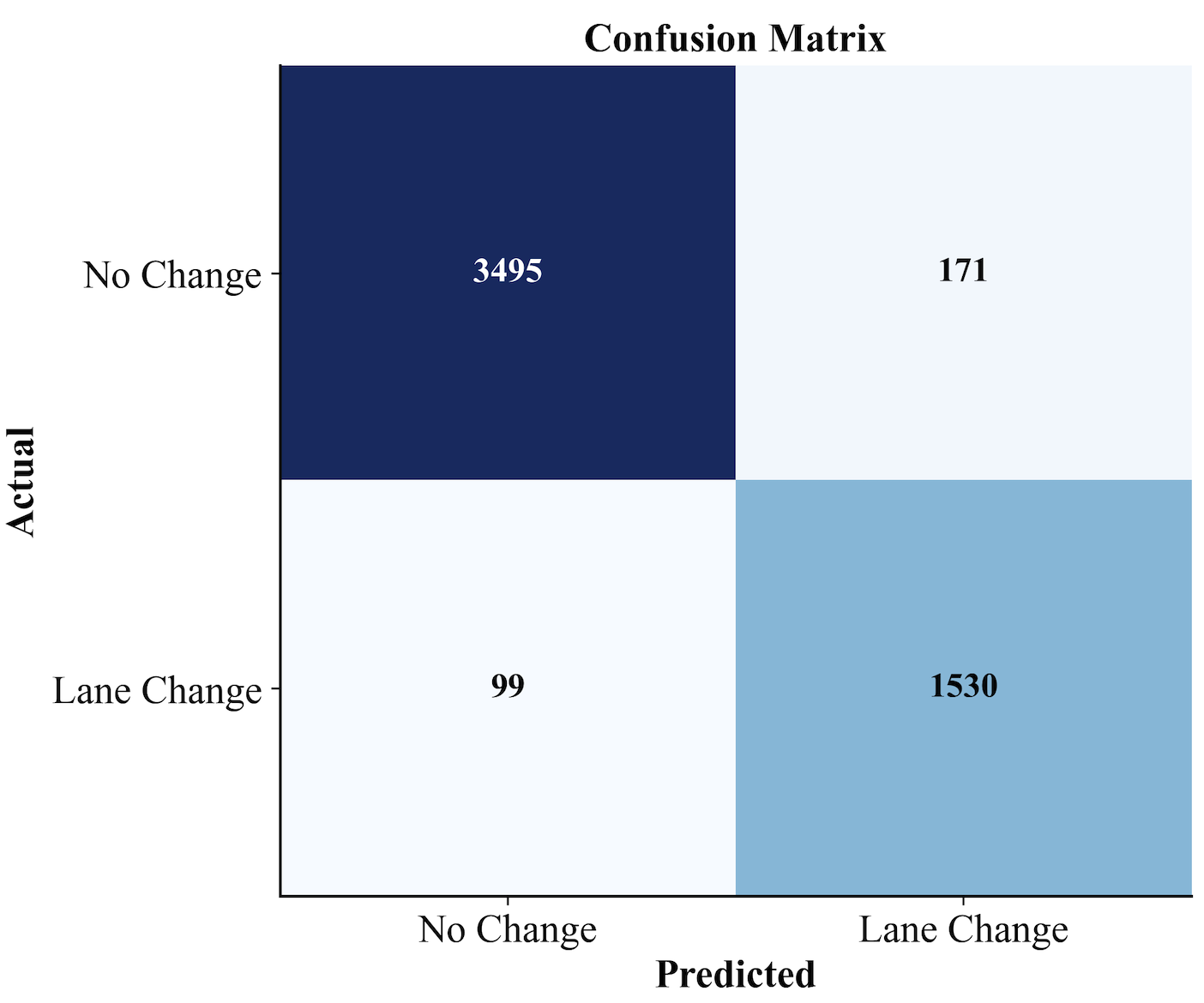
Figure 6: Performance evaluation of the proposed intention-driven lane change decision-making model, including training dynamics, validation metrics, and classification outcomes.
Motion-planning with IRL–MPC Pipeline
Surrounding vehicle trajectories are predicted using Max-Ent IRL, with reward functions parameterized by efficiency, safety, and comfort features. The AV's reference trajectory is generated via a sigmoid function, incorporating predicted target vehicle motion and lane geometry. Model predictive control (MPC) tracks the reference path, enforcing collision avoidance and kinematic feasibility.
Experimental Results
The proposed framework is evaluated against rule-based (IDM+MOBIL), learning-based (H-LSTM, BC), and cooperation-aware (VWC) baselines. It achieves 94.2% accuracy and 94.3% F1-score, outperforming all baselines by 4–15% in F1-score for lane change recognition. Ablation studies confirm the complementary roles of BC, IRL, LCS, and DCS, with the full model yielding the highest discriminative power.
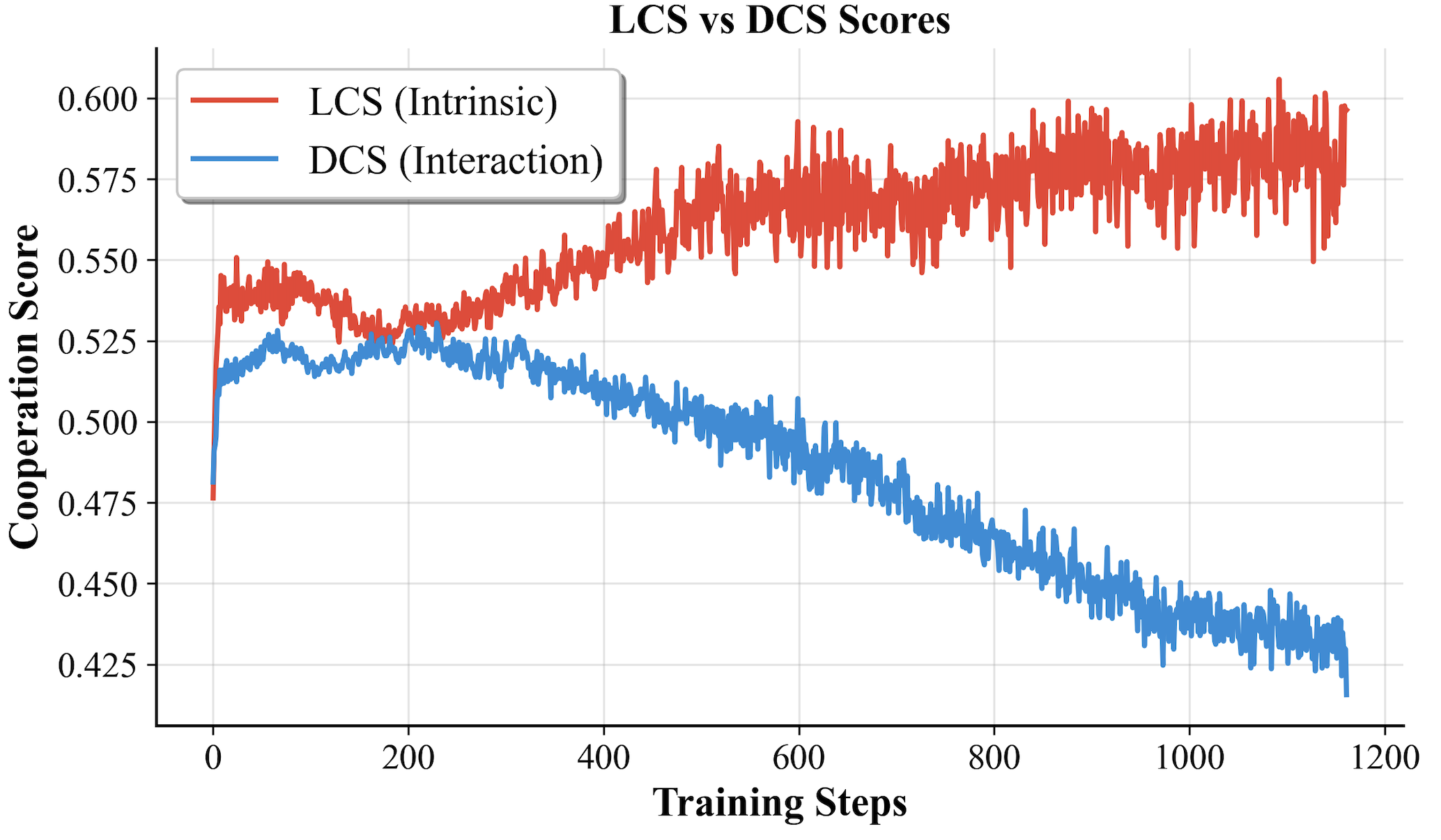
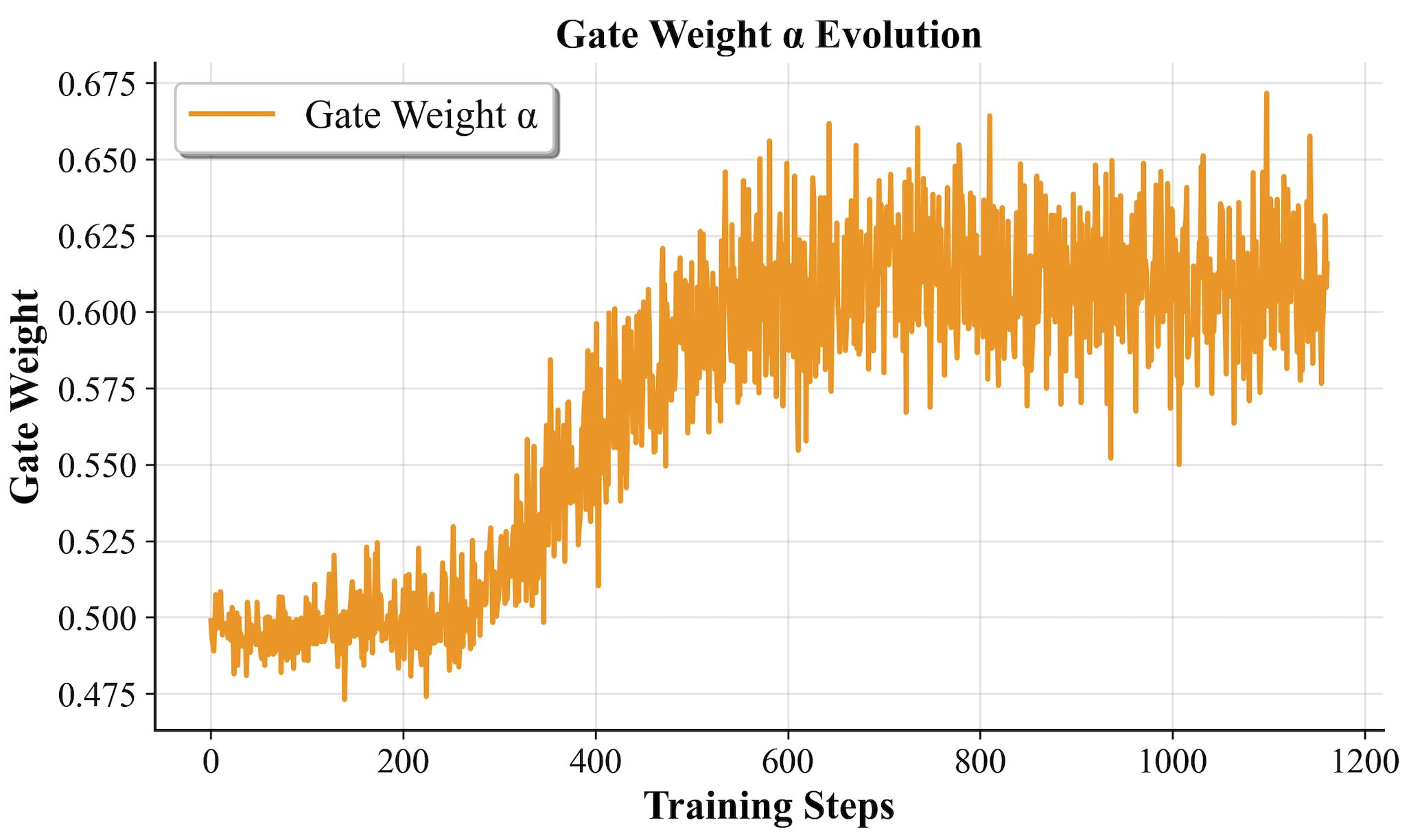
Figure 7: Convergence analysis of the cooperation-aware intention module: (a) intrinsic and interactive cooperation scores (LCS/DCS); (b) gating weight evolution during training.
Qualitative case studies demonstrate that the IRL–MPC approach enables faster, safer, and more adaptive lane changes compared to IDM, with the AV completing maneuvers in 4.6 seconds versus 7.8 seconds for the baseline.
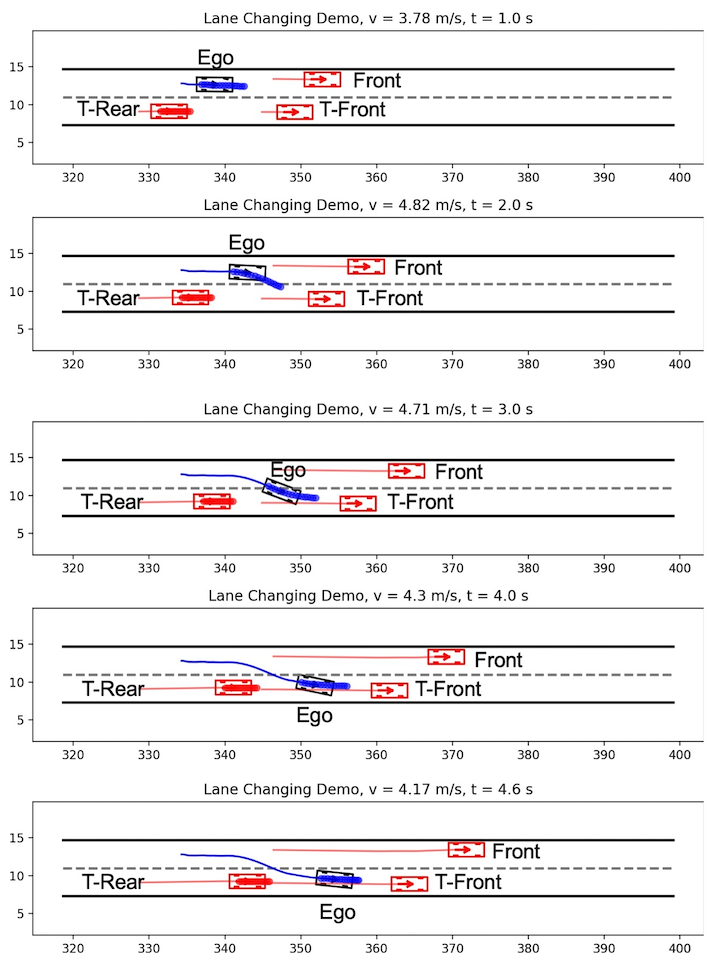
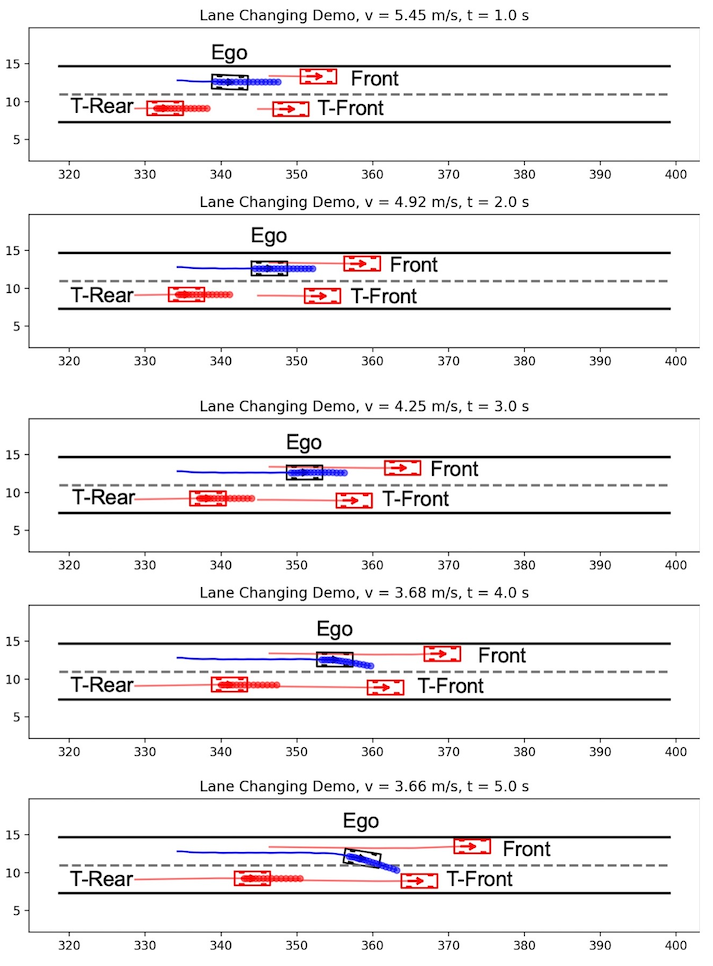
Figure 8: Qualitative results. Comparison of MPC-based lane change performance with predicted trajectories of the T-Rear vehicle.
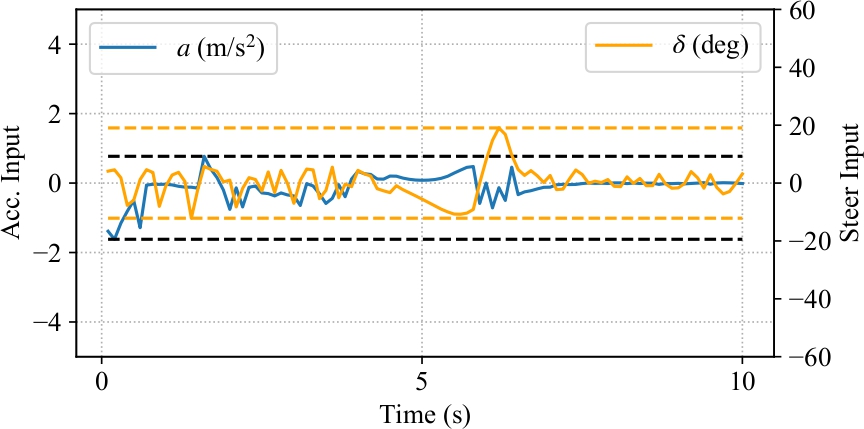
Figure 9: The control input for the ego vehicle when executing lane change maneuver.
Implications and Future Directions
The framework advances context-aware AV decision-making by explicitly modeling inter-driver heterogeneity and dynamic cooperation. The integration of driving style recognition and reward-guided planning enables AVs to interact more naturally and safely with human drivers. However, the current approach is limited by its discrete style taxonomy and focus on lane change scenarios. Future work should extend cooperation modeling to multi-intention inference, richer behavioral representations, and multi-agent coordination in broader traffic contexts.
Conclusion
This study presents a comprehensive intention-driven lane change framework for mixed-traffic environments, integrating driving style recognition, cooperation-aware intention modeling, and reward-guided decision-making. The approach achieves state-of-the-art performance in lane change recognition and execution, demonstrating the value of modeling human driver heterogeneity and dynamic cooperation. The results have significant implications for the development of socially compliant, context-aware autonomous driving systems capable of safe and efficient operation in complex real-world traffic.