- The paper presents Echo as an innovative teleoperation system that uses joint-matching and force feedback to enhance dataset collection for imitation learning.
- The paper details a robust architecture featuring an adjustable joystick with haptic feedback and a custom PCB to ensure precise manipulation and cost efficiency.
- The paper demonstrates that Echo outperforms high-cost alternatives in delicate tasks, providing a reproducible platform to improve robotic learning outcomes.
Echo: An Open-Source, Low-Cost Teleoperation System with Force Feedback for Dataset Collection in Robot Learning
Introduction
The paper presents Echo, a teleoperation system designed to enhance data collection for robotic manipulation tasks. Echo focuses on improving the quality and efficiency of dataset generation necessary for training robotics systems, especially in imitation learning contexts. Its design emphasizes cost-effectiveness and reproducibility, addressing the barrier of high equipment costs in research and development. Echo uniquely combines joint-matching teleoperation with low-cost force-feedback mechanisms, alongside user-friendly interfaces for precise manipulation, making it suitable for diverse applications.

Figure 1: Echo - main view.
System Architecture
Echo's architecture relies on a joint-matching system aligning the master device's movements with the slave robot's joints. This approach ensures direct kinematic mapping, crucial for precise control and data collection accuracy. The system includes a joystick with force-feedback capabilities, integrating potentiometers and sensors to provide haptic feedback to the user, thereby enhancing manipulation precision.
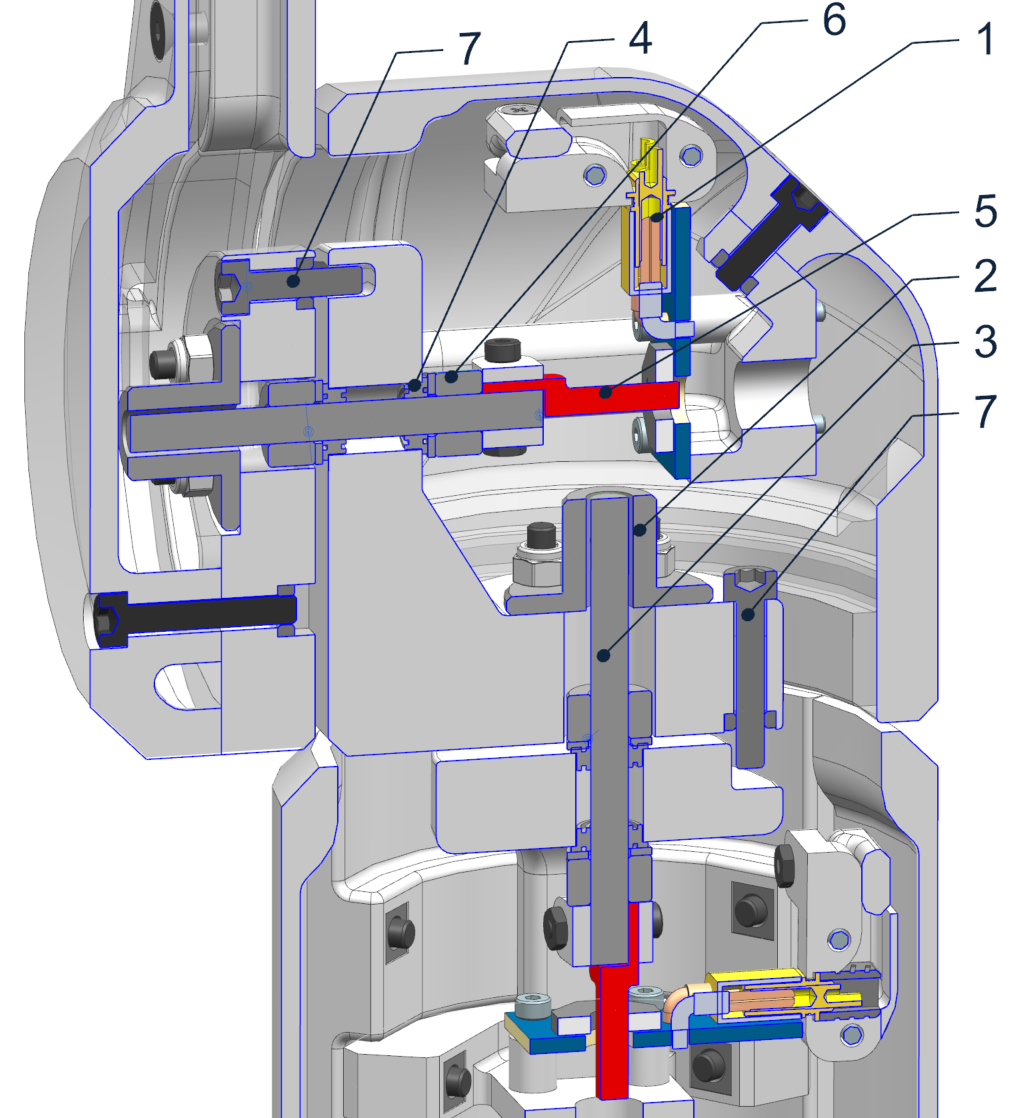
Figure 2: Joint scheme: PCB with a potentiometer and a connector (1), bracket (2), metal rod (3), bearing (4), flexible element (5), shaft holder (6), screw-based limiter (7).
The joystick’s design allows for adjustment of input sensitivity, catering to the varying precision requirements of different tasks. Equipped with a robust yet straightforward mechanical setup, Echo’s joints incorporate cost-effective materials and encasement strategies that shield internal wiring, facilitating easy maintenance without compromising durability.
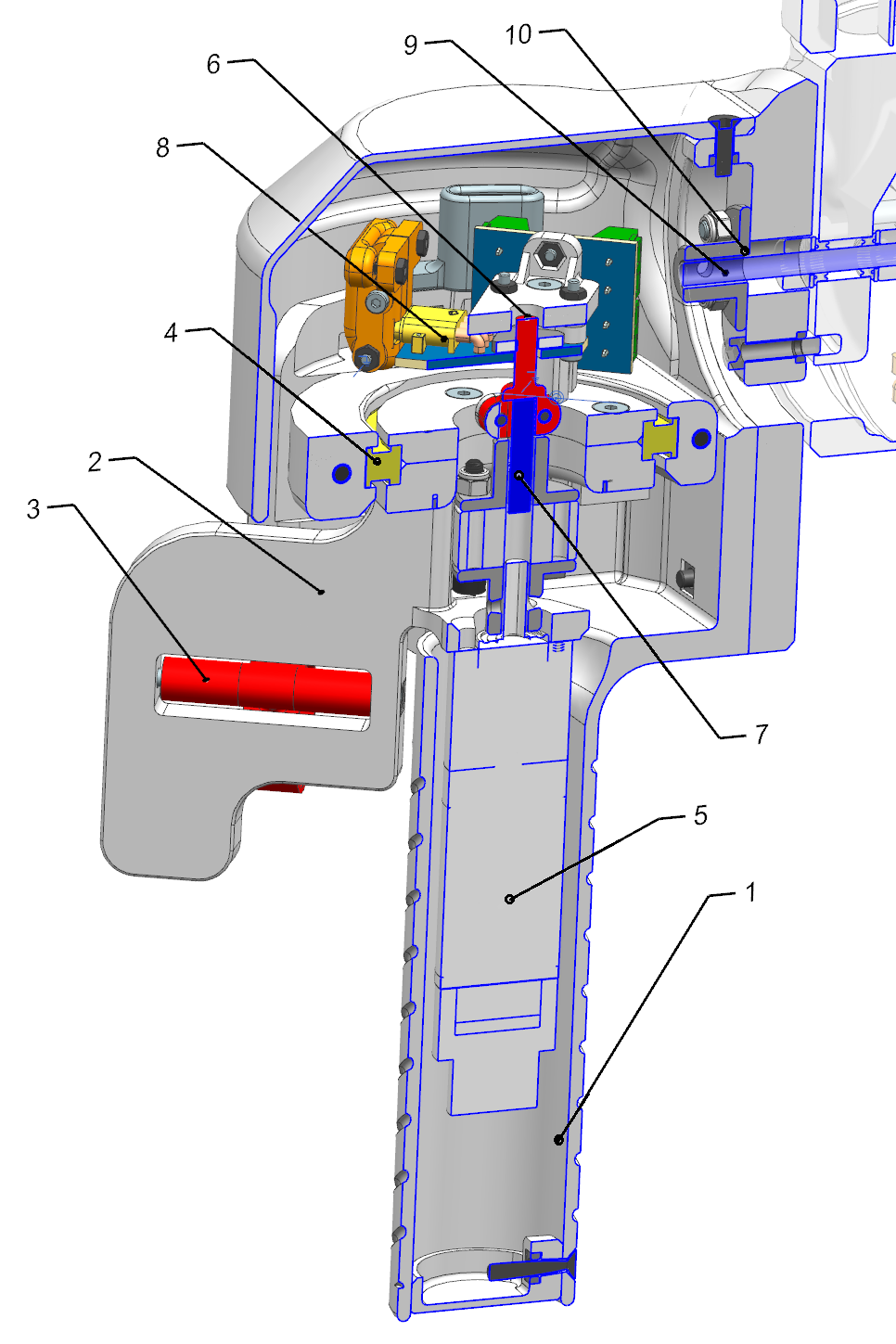
Figure 3: Joystick scheme: handle (1), actuation stick (2), trigger sleeve (3), bearing (4), motor (5), flexible element (6), metal rod (7), PCB (8), metal rod (9), bracket (10).
Electronics
Echo's electronic architecture is centered around a custom PCB housing an STM32 microcontroller, integrated with protection circuits and a robust interface for potentiometer data acquisition. By employing advanced signal conditioning techniques, Echo minimizes noise, thus ensuring precision in operation. The system's communication capabilities enable efficient feedback loops between the Echo board and the controlling PC, facilitating real-time adjustments and dataset collection.
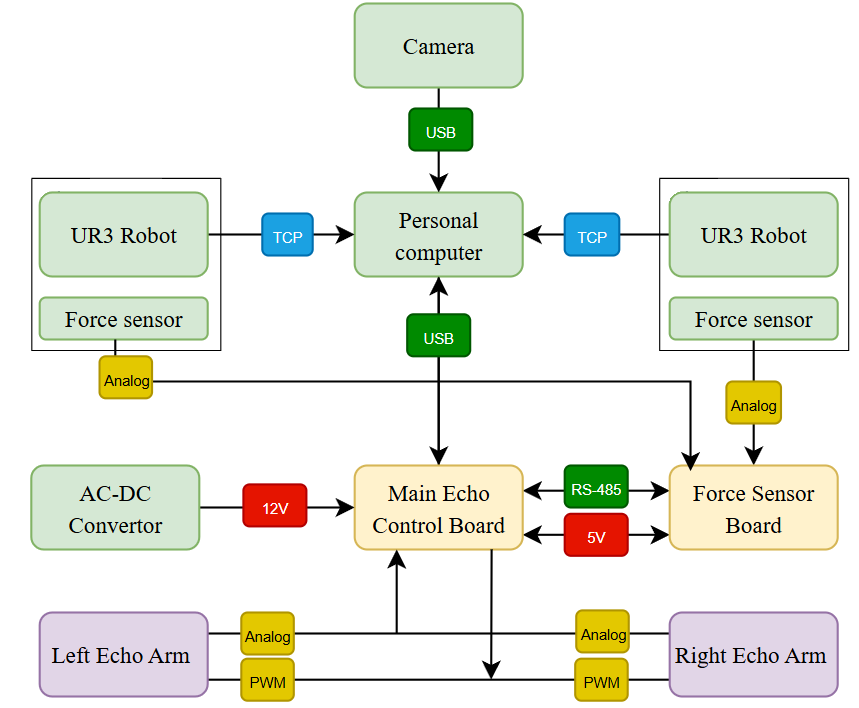
Figure 4: System architecture.
Experimental Evaluation
In practical experiments comparing Echo to other teleoperation frameworks, participants performed a series of manipulation tasks. Results demonstrated that Echo performs comparably or better than other high-cost systems, particularly excelling in tasks requiring delicate manipulation and force feedback integration. Echo’s success in high-precision scenarios highlights its robustness and adaptability, underlying the benefits of its architecture and force feedback mechanism.
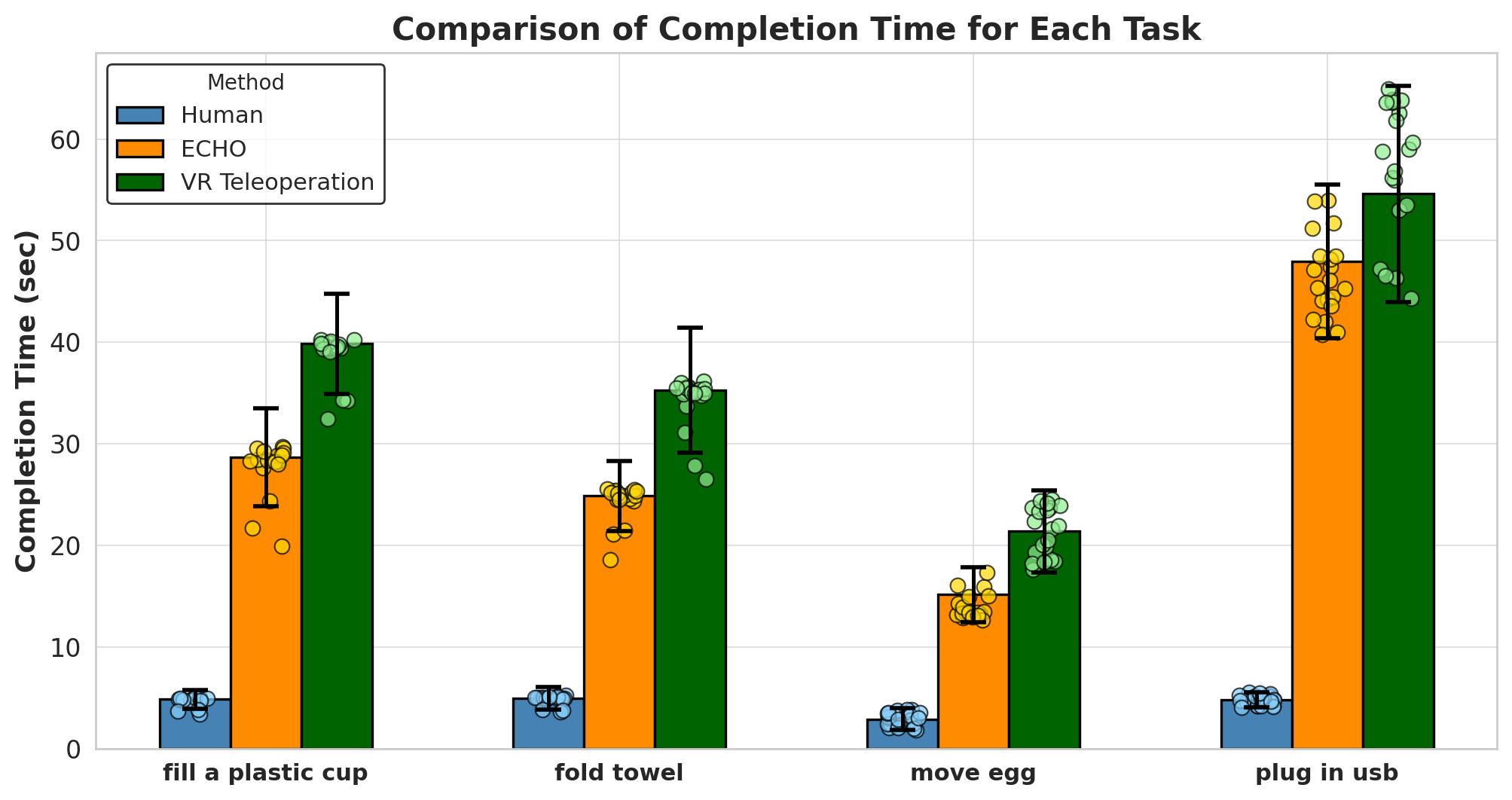
Figure 5: Comparison of task duration across teleoperation systems. For each task-system pair, average completion time (smaller is better) is shown for successful trials. Colored dots represent user times per task-system. Human performance (blue) sets the lower bound, as users complete tasks by hand.
Discussion
Echo’s development addresses significant research and application challenges by lowering the entry barrier for advanced teleoperation systems. Its open-source nature promotes community engagement, enabling further enhancements and widespread adoption. The implications for imitation learning are notable, as better-quality datasets directly translate to improved learning outcomes in robotic systems. Future directions may include optimizations of force feedback fidelity and broader manipulator compatibility, enhancing its utility in various robotic applications.
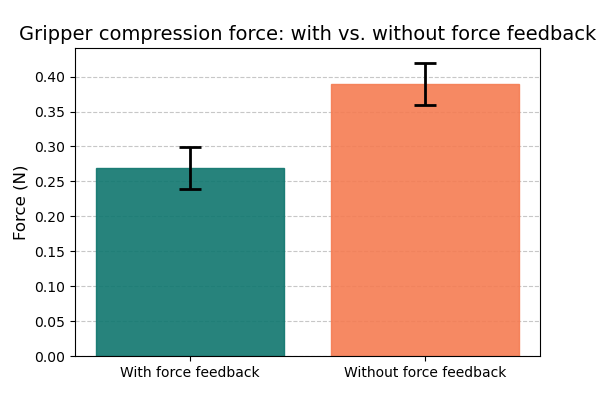
Figure 6: Gripper compression force: with vs. without force feedback.
Conclusion
Echo exemplifies an efficient, cost-conscious approach to teleoperation systems, integrating low-cost components with innovative design to provide high-quality dataset collection capabilities. Its performance in experimental assessments substantiates its potential as a research and application tool, offering significant contributions to the field of robotic teleoperation and learning.
Echo’s open platform not only addresses current data acquisition challenges but also sets a foundation for continuous innovation and adaptation across diverse operational domains.