- The paper introduces a 4-channel bilateral control system that leverages an accurate dynamics model to achieve sensorless force feedback for fast teleoperation.
- It integrates advanced observers to estimate velocity and external forces, effectively compensating for nonlinearities like friction, centrifugal, and gravitational effects.
- Experiments with a CRANE-X7 manipulator show improved position tracking and enhanced success in imitation learning tasks using transformer-based action chunking.
Fast Bilateral Teleoperation and Imitation Learning Using Sensorless Force Control
This paper presents an innovative approach to teleoperation and imitation learning, particularly focusing on low-cost manipulators utilizing sensorless force control. The methodology involves advanced 4-channel bilateral control systems integrated with accurately identified manipulator dynamics. The research demonstrates enhanced teleoperation performance without the need for expensive force sensors, enabling practical high-fidelity operations on affordable hardware.
Introduction
The work addresses the challenge in existing teleoperation systems that predominantly use unilateral control, leading to limitations in fast or contact-rich operations owing to the absence of force feedback. By employing a 4-channel bilateral control system, this paper showcases that fast teleoperation with force feedback is feasible without force sensors. This is achieved through the integration of a parameter-identified dynamics model, allowing for effective compensation of nonlinear terms and estimation of velocities and external forces.
Methodology
The key innovation lies in the application of 4-channel bilateral control, a method allowing simultaneous position and force control. This system requires an accurate dynamics model for both the leader and follower manipulators, enabling the precise exchange of positions, velocities, and torques, thus achieving high operability even when high feedback gains are not possible.
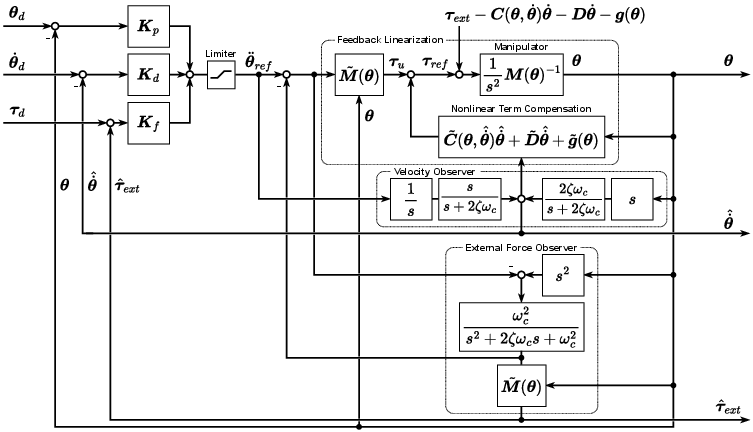
Figure 1: Block diagram of controller and observer.
The control system's robustness is enhanced through velocity and external force observers which estimate necessary parameters during operations. The paper implements a novel observer that can estimate both velocity and external forces, overcoming the limitations associated with low-cost hardware such as slow control cycles and inadequate encoder resolution.
The dynamics are expressed through a rigid serial link model, where the control inputs are corrected via compensation for centrifugal and Coriolis forces, viscous friction, and gravitational forces. Parameter identification is conducted using a regressor matrix based on OpenSYMORO, which improves the control even in high-dynamics situations.
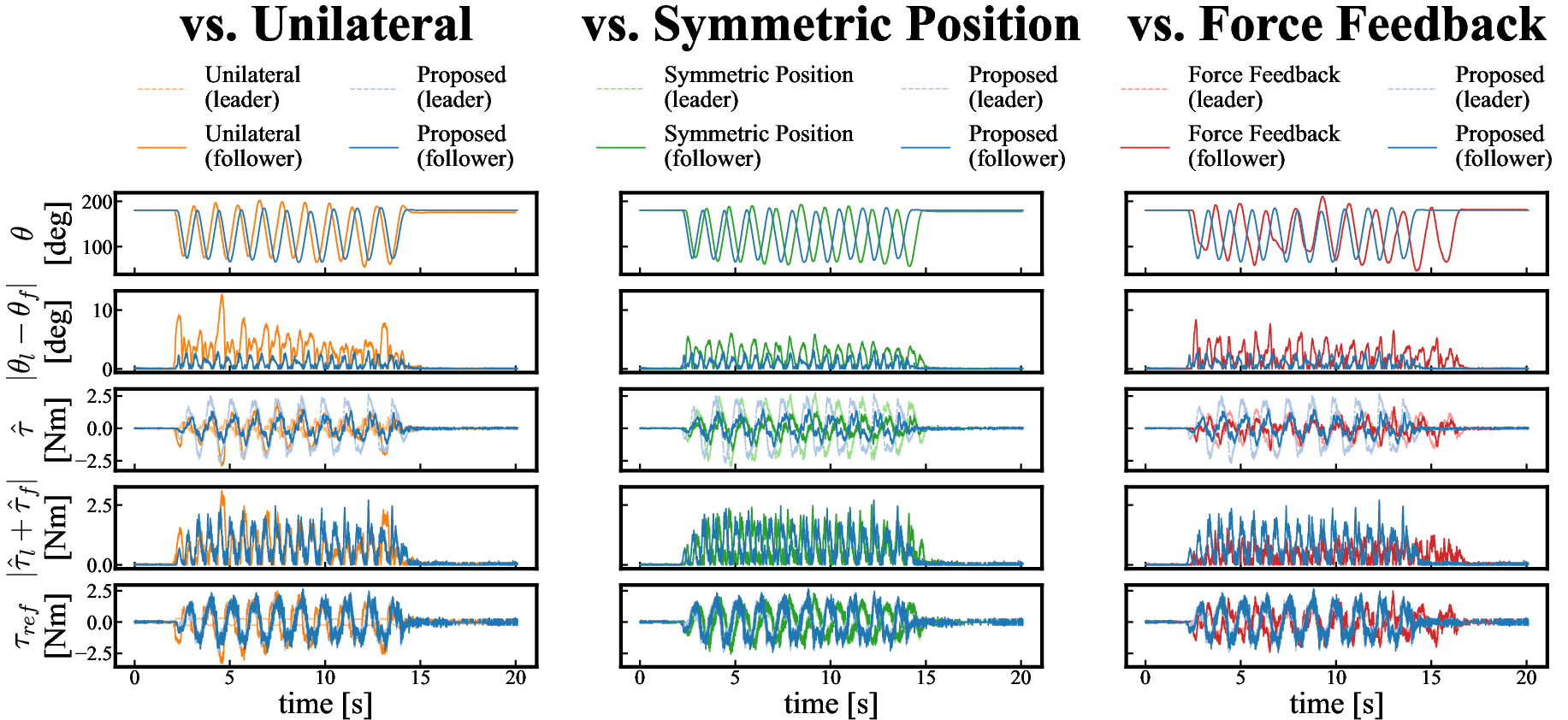
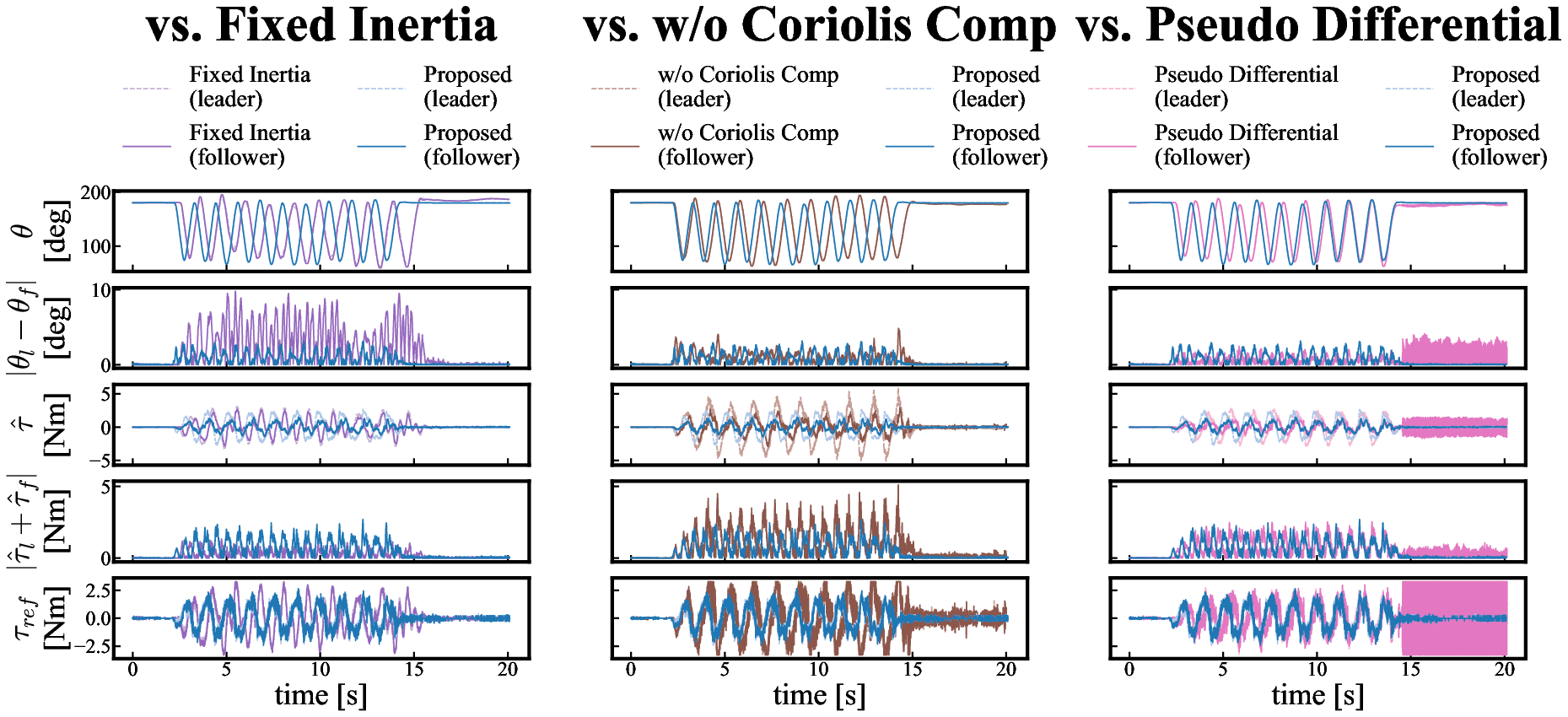
Figure 2: Results of teleoperation comparison. We shook the joint that is closest to the base at high speed by hand. The sign of the external force on the leader is reversed.
Experiments
The experimental setup utilizes a CRANE-X7 manipulator to test teleoperation performance, comparing various control methodologies including unilateral and force-feedback types. The proposed 4-channel system showed superior position tracking at high speeds compared to other methods, as indicated by reduced position errors and improved tracking consistency in dynamic tasks.
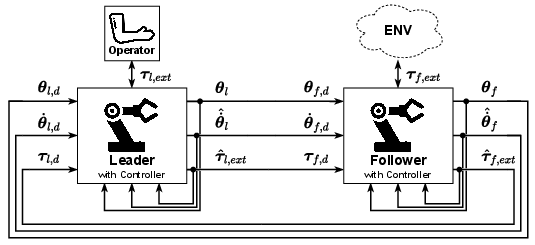
Figure 3: Block diagram of 4-channel bilateral control. The leader and follower exchange angles, angular velocities, and torques with each other.
Further experiments focused on imitation learning tasks using collected teleoperation data. Action Chunking with Transformer (ACT) served as the neural network architecture. The incorporation of force information improved task success rates significantly across multiple tasks including dual-arm pick-and-place, nut turning, and cucumber peeling.
Conclusion
This study confirms that integrating a high-precision dynamics model into a 4-channel bilateral teleoperation system significantly enhances teleoperation capabilities, even on low-cost manipulators. The research underscores the potential for utilizing force feedback collected through sensorless means in imitation learning, substantially improving the accuracy and success of autonomous task executions. Future work could explore adapting the framework for more diverse neural network architectures and further optimizing parameter identification techniques to broaden applicability in various robotic tasks.