- The paper demonstrates that an adaptive observer accurately estimates system states and parameters using real-world PMU measurements.
- It introduces a robust mapping from substation measurements to generator terminal buses, addressing non-idealities in power system models.
- Experimental validations report sMAPE errors below 1.65% and parameter deviations under 7%, highlighting its practical applicability.
Dynamic State and Parameter Estimation in Multi-Machine Power Systems Using Real-World PMU Measurements
Introduction and Motivation
State estimation and parameter identification in power systems are indispensable for dynamic system monitoring, control, and stability assessment, especially as the grid undergoes rapid transformation due to the penetration of renewable sources and increasing deployment of power electronic devices. The paper "Dynamic state and parameter estimation in multi-machine power systems - Experimental demonstration using real-world PMU-measurements" (2203.14623) addresses the experimental validation of a dynamic state estimation (DSE) algorithm incorporating Phasor Measurement Unit (PMU) data from an extra-high voltage grid substation in Germany. Unlike most of the literature, which focuses on simulation-based studies, this work provides a comprehensive methodology and experimental results using real-world PMU data, a critical step for industrial adoption.
The contributions involve (i) a robust measurement mapping from the PMU location (substation) to the generator terminal bus, (ii) significant algorithmic enhancements for handling practical deviations from idealized power system models, and (iii) thorough empirical validation via auto- and cross-validation with diverse operating scenarios.
Power System Modeling and Measurement Mapping
The study analyzes a large-scale synchronous generator (SG) and its connection with the transmission system, including intermediary components such as a tap-changing transformer and auxiliary systems.
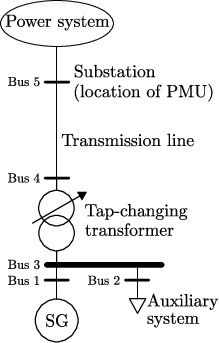
Figure 1: Schematic representation of the considered power plant, highlighting the tap-changing transformer, auxiliary system, and a PMU installed at the nearest substation (Bus 5).
A third-order flux-decay SG model is adopted, allowing direct algebraic relationships between measurable PMU signals and select machine internal states. Essential to this work is the nontrivial mapping of PMU measurements from the substation to the terminal bus of the generator. This mapping accounts for transmission line parameters, transformer (including tap-changing effects), and aggregate auxiliary load characteristics, thereby ensuring accurate correspondence between measured signals and generator states.
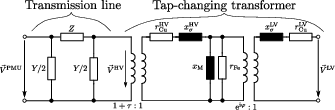
Figure 3: Pi-equivalent representation of the transmission line and tap-changing transformer, critical for the measurement mapping.
The SG model includes a time-varying mechanical torque, with the turbine and governor subsystem explicitly incorporated to reflect realistic power plant dynamics.

Figure 2: Model of the governor and turbine subsystem, necessary for accurate torque dynamics.
Algorithmic Advancements in Observer Design
Several notable advancements are presented for the observer structure:
- Relaxation of idealized model restrictions: The observer no longer requires equal direct-axis and quadrature-axis reactance (xd′=xq) or neglects the stator resistance, improving applicability across diverse synchronous generators.
- Explicit handling of time-varying input torque: The adaptive observer is reformulated to accommodate known, time-varying Tm (from a detailed governor-turbine model).
- Novel Dynamic Regressor Extension and Mixing (DREM) adaptations: A new regressor extension based on time-derivative approximations (rather than delay operators) is proposed to enhance parameter convergence under real-world excitation and noise.
- Advanced filtering and estimator tuning: Higher-order filtering and adaptive gain scheduling are introduced to reject measurement noise effectively and improve estimator performance regardless of spectral excitation.
These extensions enable accurate real-time tracking of both internal generator states and critical system parameters under the harsh non-idealities of field PMU data.
Experimental Validation with Real-World Measurements
The observer and parameter estimator are validated using PMU data collected at the EHV substation, with the mapped terminal measurements supplied to the estimation algorithm.
The validation protocol involves two time-series from different operating points—one for auto-validation (parameter tuning) and one for cross-validation (performance assessment).
Auto-Validation Results
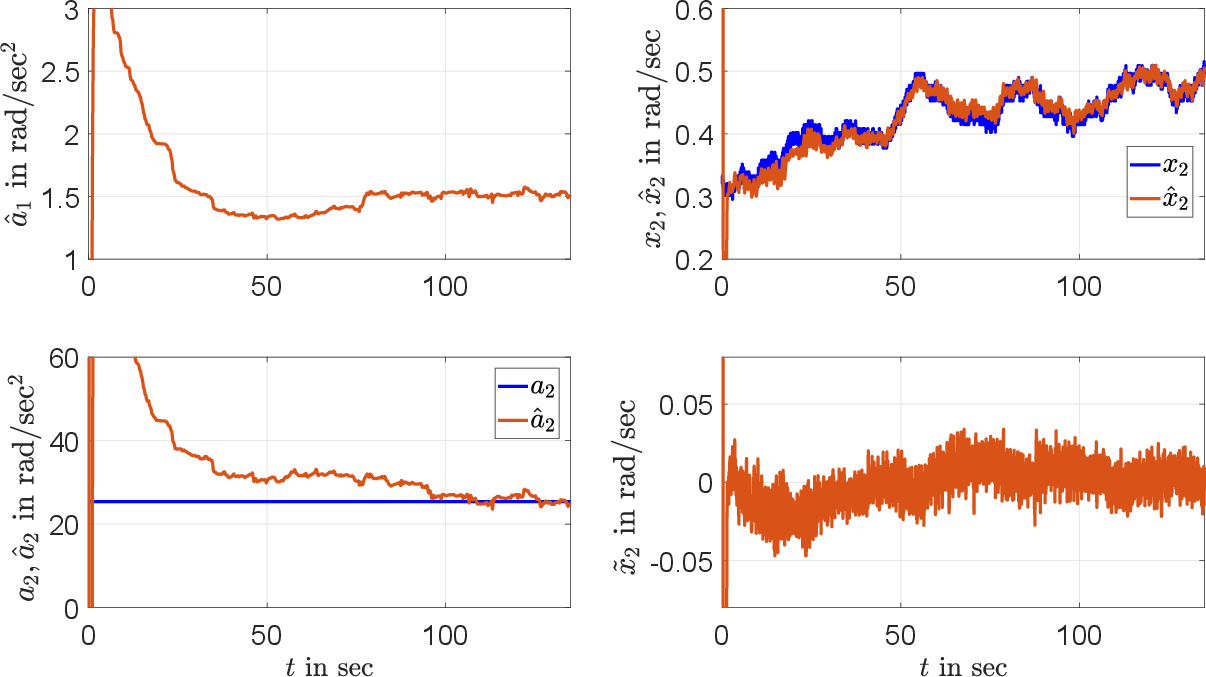
Figure 5: Auto-validation of the I&I adaptive observer for x2: the tracked state and parameter estimates converge tightly to the measured reference.
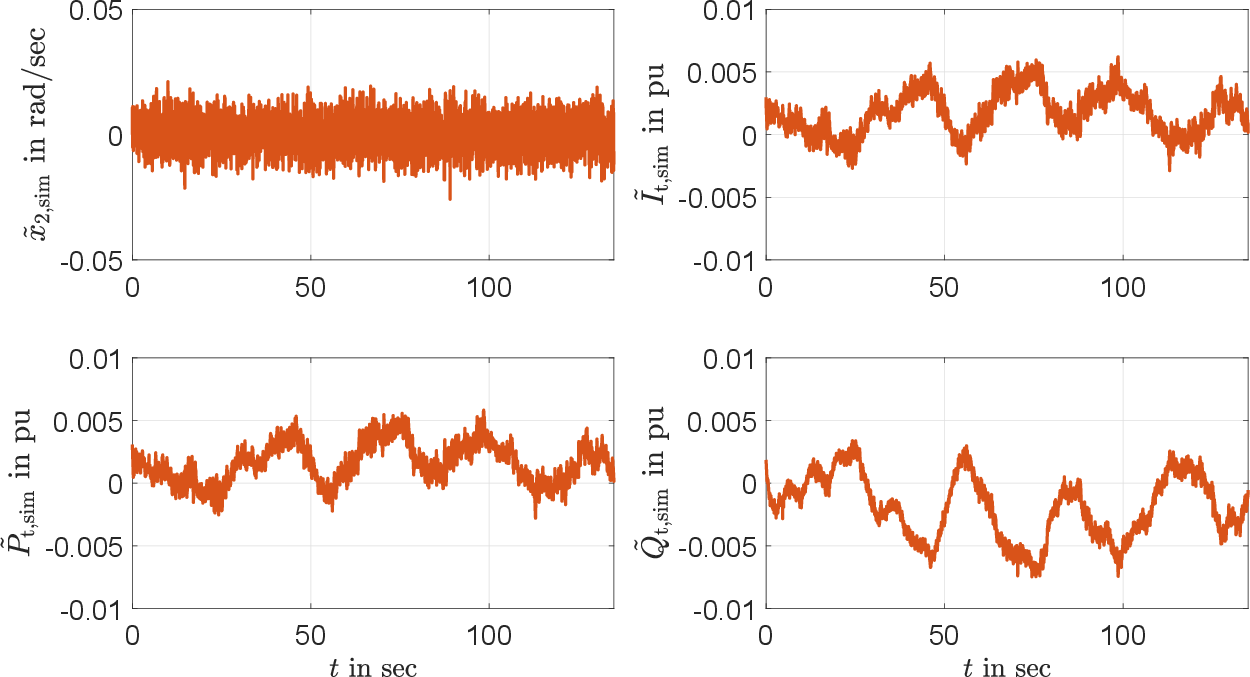
Figure 4: Error between simulation (using DREM-identified parameters) and mapped PMU measurements for the auto-validation scenario.
Key metrics include symmetric Mean Absolute Percentage Error (sMAPE) below 0.4% for x2 in auto-validation and less than 1.65% for all simulated electrical variables (x2, It, Pt, Qt). The relative error between benchmark parameter values and online estimates is as low as 5%, substantiating the estimator's high precision.
Cross-Validation Results
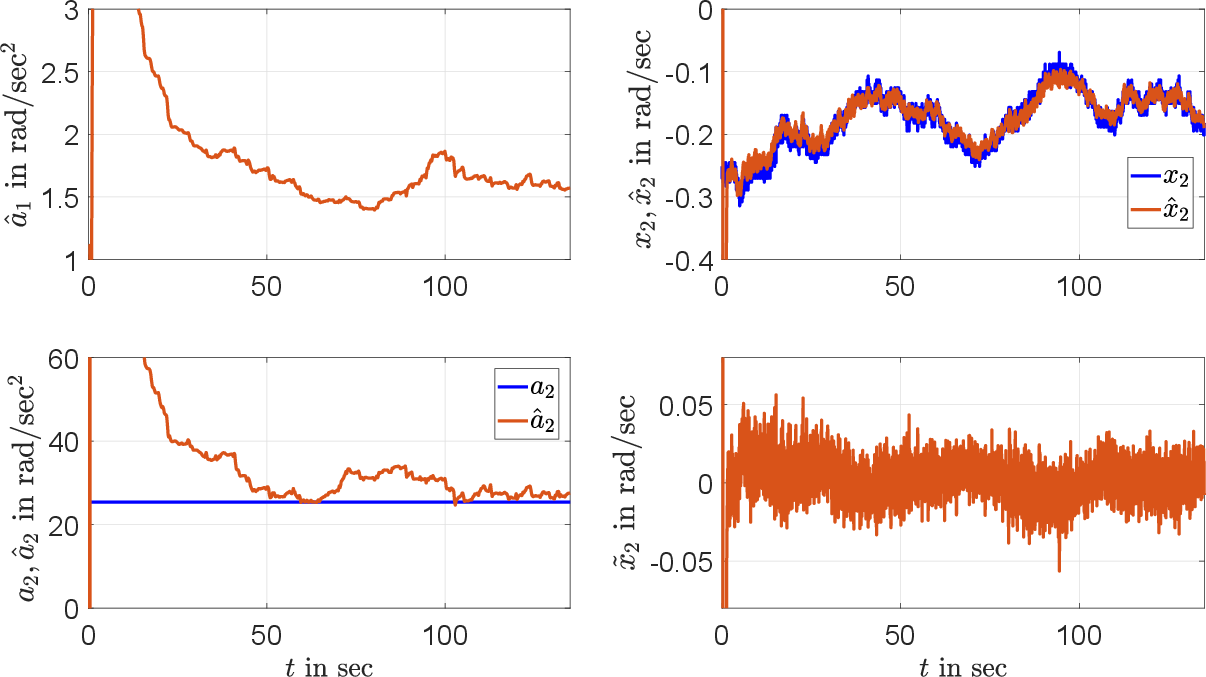
Figure 6: Cross-validation—adaptive observer tracking for x2 and DREM-based parameter convergence using previously tuned parameters.
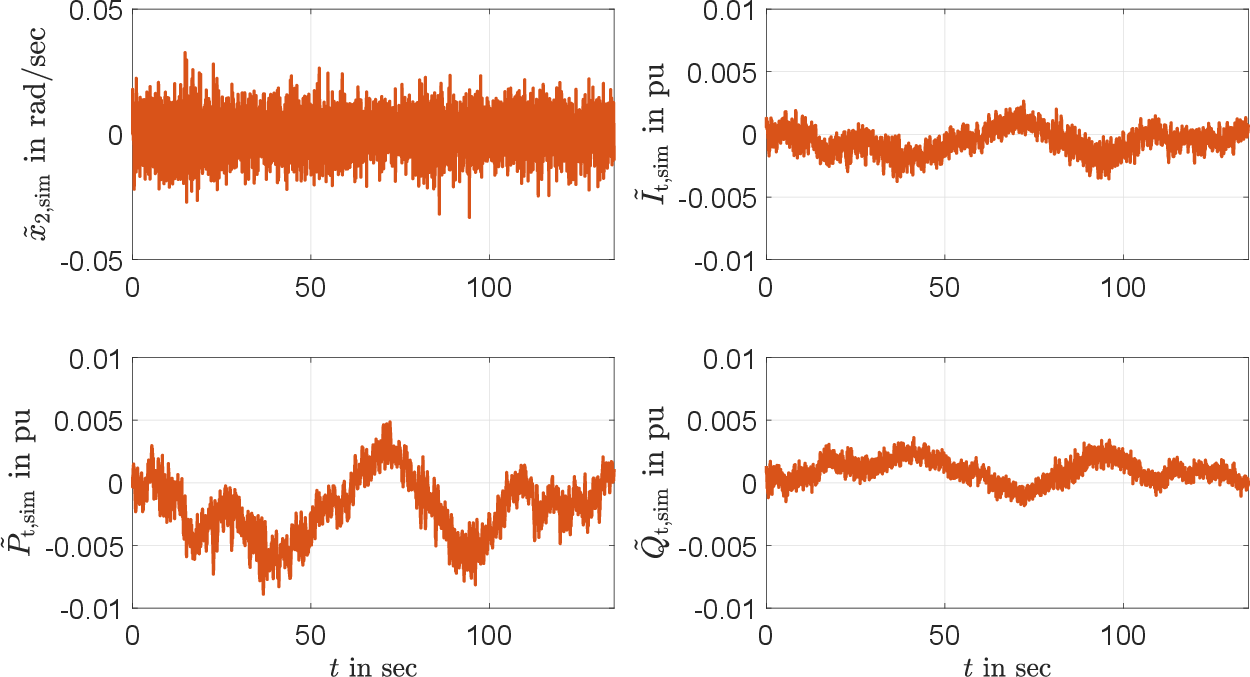
Figure 7: Error between simulation (using cross-validated parameters) and mapped PMU measurements for the cross-validation scenario.
Despite operating in a lower-excitation regime, the adaptive observer achieves sMAPE under 1.18% on x2 and under 0.73% for simulated outputs, with parameter errors remaining below 7%. These results demonstrate robust estimator transferability across operational conditions, and the observer's viability for industry application.
Implications and Future Directions
This work addresses the critical gap between theoretical algorithm development and practical deployment, demonstrating that state-of-the-art nonlinear adaptive observers—when properly extended—can deliver reliable state and parameter estimates from noisy field PMU measurements and non-ideal system configurations. This bridges the translational gap for dynamic security assessment, model calibration, and operational monitoring applications at TSOs.
The robust mapping from substation to generator terminal bus enables TSOs to exploit PMU installations at accessible locations without needing invasive plant-level instrumentation. The advanced observer structure with noise-robust DREM and adaptive gain scheduling sets a new standard for online parameter calibration under uncertain and time-varying excitation.
Future research directions include:
- Enhanced auxiliary system modeling: The simplicity of the current auxiliary load representation may be expanded to improve accuracy under variable loading and for different plant types.
- Incorporation of unknown governor/turbine dynamics: Joint parameter identification of both generator and primary control blocks could further increase the utility of the approach in cases of partial model uncertainty.
- Augmentation for higher-order generator models: Extending to fourth-order or detailed sub-transient representations (as in [bobtsov_state_2021]) is a natural progression to cover modern grid requirements.
Conclusion
The paper provides the first empirical demonstration of a nonlinear observer-based dynamic state and parameter estimator in a realistic multi-machine power system, leveraging the latest advances in PMU hardware, system modeling, and adaptive estimation techniques. Its rigorous mapping methodology, innovative algorithmic improvements, and conclusive field validation mark a significant milestone for practical grid monitoring and control strategies that are robust to model deviations and measurement imperfections. This fosters confidence in advanced DSE technologies and their deployment in modern and future power systems dominated by renewable and electronically interfaced resources.
Reference:
- "Dynamic state and parameter estimation in multi-machine power systems - Experimental demonstration using real-world PMU-measurements" (2203.14623)
