Teaching Robots to Feel: Learning Compliant Manipulation Through Haptic Teleoperation
This presentation explores the Universal Manipulation Exoskeleton (UME), a breakthrough teleoperation system that teaches robots to manipulate objects with human-like compliance. By providing real-time haptic torque feedback to operators and capturing whole-arm configurations, UME enables the collection of rich demonstration data for contact-rich tasks. The system's universal retargeting algorithm works across diverse robot platforms, and policies trained with UME achieve 90-95% success rates on force-sensitive tasks where traditional approaches fail.Script
A blindfolded operator unsheathes a sword using a robotic arm they've never directly touched. The secret is haptic torque feedback transmitted in real time through a lightweight exoskeleton, allowing the teleoperator to feel exactly what the robot feels at every joint.
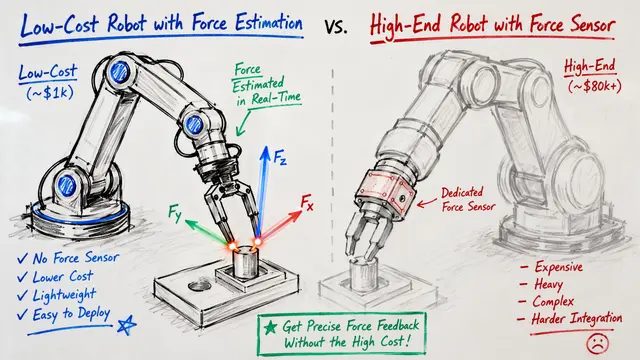
Contact-rich manipulation has been robotics' Achilles heel. Existing teleoperation systems lack comprehensive force sensing, so operators can't feel when the robot is about to damage something delicate or fail to apply enough pressure to complete a task.
The researchers built UME with a 3-1-3 degree-of-freedom structure that mirrors human shoulder, elbow, and wrist biomechanics. This sub-manipulator decomposition enables stable retargeting across wildly different robot platforms, from 6-degree-of-freedom X-ARMs to 7-degree-of-freedom Franka robots, without hitting singularities or losing intuitive control.
Policies trained with Action Chunking Transformers ingest synchronized proprioceptive signals including joint configurations and torques alongside visual features. This multimodal context allows the learned policy to modulate compliance in real time, coordinating whole-arm strategies that manage contacts and occlusions.
Across four benchmark tasks requiring precise force application and constrained geometry navigation, UME-trained policies achieved 90 to 95 percent success rates. The no-torque and end-effector-only baselines frequently failed altogether, demonstrating that joint-level torque feedback is not optional for contact-intensive manipulation.
At under 2000 dollars and compatible with off-the-shelf hardware, UME makes scalable compliant policy learning accessible beyond elite labs. The real breakthrough is teaching robots to embrace physical contact rather than avoid it, a shift that could redefine how foundation models for robotics handle the messy, force-mediated world. Explore the full technical details and create your own video summaries at EmergentMind.com.