FACTR 2: Teaching Cheap Robots to Feel Without Force Sensors
This presentation explores how commodity robot arms can achieve high-fidelity force sensing and contact-aware manipulation without expensive force-torque sensors. Through Neural External Torque Estimation (NEXT), robots learn to infer contact forces from standard motor signals using just 10 minutes of training data. Combined with Force-Informed Re-Sampling Training (FIRST), which strategically emphasizes contact-critical moments during policy learning, this approach enables low-cost platforms to tackle challenging assembly and insertion tasks previously reserved for premium hardware.Script
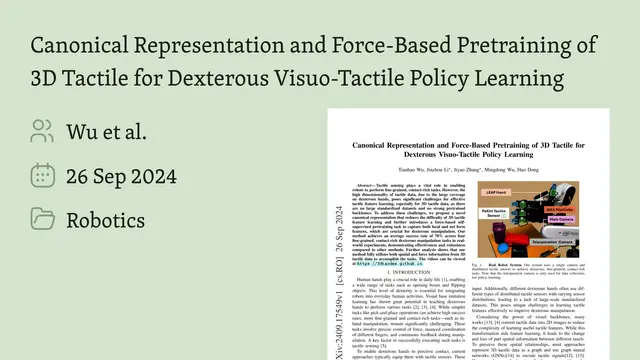
Precise robotic assembly and insertion require feeling contact forces, but most robot arms lack force sensors because they cost thousands of dollars and complicate integration. The authors of this paper asked: can a cheap robot learn to sense force from signals it already has?
Their solution is Neural External Torque Estimation, or NEXT. An LSTM network watches the robot move freely for just 10 minutes, learning to predict what torque the motors should produce during unobstructed motion. When the robot later encounters contact, the difference between measured and predicted torque reveals the external force.
On a Franka robot arm, NEXT achieves joint torque errors below half a Newton meter during contact, outperforming both analytical methods and disturbance observers. In free space, its estimates are cleaner than the dedicated force sensor itself, with nearly zero drift.
Knowing when contact happens unlocks smarter policy training. The authors introduce Force-Informed Re-Sampling Training, which segments demonstrations into free-space, pre-contact, and contact phases using NEXT. During training, the system deliberately oversamples the rare, failure-prone moments just before and during contact.
Across five long-horizon manipulation benchmarks involving assembly, insertion, and screwing, FIRST improves task progress by at least 17 percent over all baselines. Policies trained with this contact-aware data distribution focus attention precisely on key interaction events, while those conditioned on raw motor current do not.
FACTR 2 brings force-aware manipulation to affordable hardware, requiring no additional sensors and only a 10-minute calibration. By learning what matters in contact-rich tasks, cheap robots can now handle assembly work that once demanded premium platforms. Explore more research like this and create your own instructional videos at EmergentMind.com.