PDDLStream: When Planners Meet Samplers
This lightning talk explores PDDLStream, a breakthrough framework that integrates symbolic planners with blackbox samplers to solve robotic planning problems in high-dimensional, continuous spaces. We'll dive into how streams enable adaptive planning, see concrete evidence from robotic experiments, and understand why this matters for the future of intelligent systems operating in complex, real-world environments.Script
Planning a robot's motion through cluttered space means searching through infinite continuous configurations, and traditional symbolic planners simply can't sample the right values fast enough to find feasible solutions.
The authors introduce streams, an interface that lets symbolic planners call blackbox sampling procedures on demand. Each stream is a conditional generator that produces infinite sequences of parameter values, dynamically constructing the bindings a planner needs without precomputing an intractable state space.
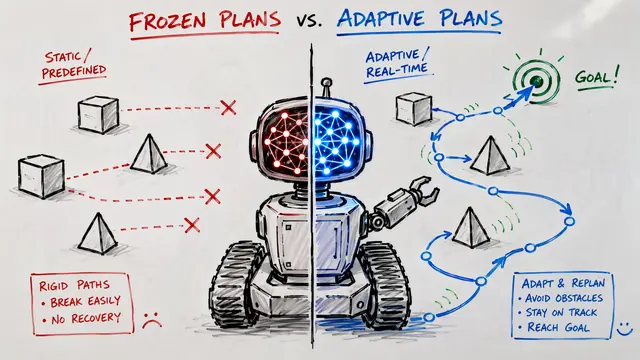
The adaptive algorithm decomposes each PDDLStream problem into a sequence of finite classical planning problems. When a plan fails due to missing parameter bindings, streams sample new values and feed them back, balancing exploration of fresh candidates with exploitation of promising partial plans.
In robotic manipulation and kitchen tasks, the adaptive algorithm drastically outperformed existing methods. Tightly constrained problems that previously required exhaustive search were resolved orders of magnitude faster by sampling only the parameters actually needed for feasible solutions.
PDDLStream assumes sampling procedures can generate suitable values when called, but it struggles when blackbox samplers fail frequently or when the environment changes faster than the planner can adapt. Real-time replanning under uncertainty remains an open challenge for this framework.
By unifying symbolic reasoning with continuous sampling, PDDLStream opens the door to robots that plan intelligently in the messy, high-dimensional world we actually inhabit. Explore how frameworks like this are shaping the future of autonomous systems at EmergentMind.com, where you can create your own videos about cutting-edge research.