Recurrent State-Space Models Explained
This lightning talk introduces Recurrent State-Space Models, a powerful framework that combines deterministic memory with probabilistic reasoning for sequential prediction and control. We explore how RSSMs blend neural recurrence with stochastic latent variables, examine their training through variational inference, survey architectural variants from discrete latents to logic-augmented dynamics, and discover their impact on robotic manipulation, adaptive control, and long-horizon planning in partially observed environments.Script
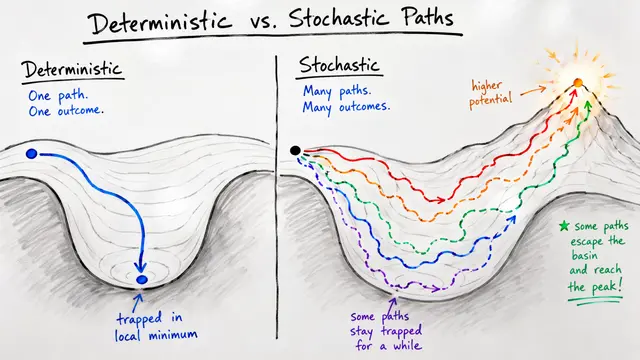
What if we could build models that remember the past like a neural network, yet reason about uncertainty like a probabilistic system? Recurrent State-Space Models achieve exactly this fusion, becoming the backbone of modern model-based reinforcement learning and robotic control from complex observations.
Let's begin by understanding how RSSMs combine memory and randomness.
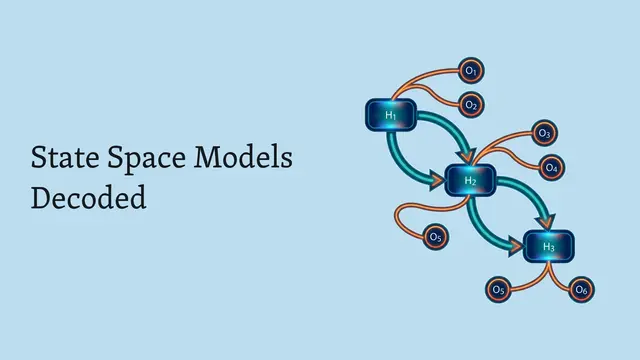
Building on that idea, RSSMs maintain two interacting components at every time step. The deterministic hidden state encodes what the system reliably remembers, while the stochastic latent variable represents what remains uncertain or multimodal, enabling the model to express both memory and probabilistic reasoning simultaneously.
Following this structure, the generative process cleanly factorizes into initial conditions, transitions conditioned on hidden state, and observations emitted from both components. This factorization is what makes RSSMs tractable for sequential prediction while retaining expressiveness through neural parameterization.
Now we turn to how RSSMs learn from data.
RSSMs are trained via variational inference, maximizing an evidence lower bound that trades off reconstructing observations against staying close to the prior. Interestingly, because the approximate posterior only filters forward in time, the model tends to inflate uncertainty estimates, which acts as a built-in regularizer during planning.
Connecting theory to practice, RSSM architectures vary widely. On the left, design choices span continuous to discrete latents, goal conditioning, and even logic integration. On the right, practical training employs standard deep learning techniques augmented with KL-balancing and contrastive losses to handle high-dimensional observations and prevent posterior collapse.
Let's see where these models shine in application.
These architectural innovations translate into tangible real-world impact. RSSMs now enable robots to manipulate deformable objects, flatten garments without explicit mesh models, and control systems directly from noisy pixel observations. Logic-augmented variants reduce error accumulation for multi-step planning, while adaptive designs handle changing dynamics on the fly.
Despite their success, standard RSSMs face limitations, particularly in how filtering inference handles partial observability. The frontier now lies in hybrid architectures that marry classical smoothing with neural flexibility, incorporate explicit logical constraints, and distinguish aleatoric from epistemic uncertainty for truly robust sequential decision-making.
RSSMs elegantly unify memory and uncertainty, powering the next generation of intelligent systems that perceive, predict, and act in complex, partially observed worlds. To dive deeper into state-space models and their applications, visit EmergentMind.com.