Generating Robot Hands from Human Demonstrations
Abstract: Robot learning has advanced rapidly in learning control, but learning the physical body of a robot remains much more difficult because jointly searching over design and control creates a very large combinatorial problem. Here, we present a data-driven framework for generating robot hands from human demonstrations. Instead of learning a complex controller together with each candidate design, we generate robot hand designs using the same simple control policy used after fabrication: matching fingertip positions through inverse kinematics. Using more than 4 million frames of human fingertip motion from everyday manipulation, our algorithm optimizes tree-structured robot hands to reproduce desired target motions. The framework produced both a 6-degree-of-freedom (DoF) general-purpose hand and lower-DoF task-specific hands with spatial four-bar mimic joints. To accelerate the search over designs, we trained a reinforcement-learning (RL) actor to propose good hand designs and joint angles, reducing search time from hours to minutes. We fabricated the mechanisms directly as one-piece articulated structures with print-in-place joints. In real-world experiments, the 6-DoF hand achieved highly accurate teleoperated fingertip tracking better than available commercial robot hands, whereas the specialized 3-DoF hands reproduced structured human and synthetic trajectories with reduced mechanical complexity. These results showed that large-scale human motion data can be used not only to train robot controllers but also as a reference for optimizing and generating the physical embodiment of robots.
Paper Prompts
Sign up for free to create and run prompts on this paper using GPT-5.
Top Community Prompts
Explain it Like I'm 14
What is this paper about?
This paper shows a new way to design robot hands by watching how real human hands move. Instead of only teaching a robot “how to move,” the authors also design the robot’s “body” (its hand shape and joints) so it can naturally copy human fingertip motions with simple control.
What questions did the researchers ask?
- Can we use large amounts of human hand motion data to automatically “shape” a robot hand so its fingertips can move like ours?
- Is it possible to design both a general-purpose hand (good at many motions) and simpler, task-specific hands (good at one type of motion) from the same data?
- Can we speed up the search for good designs so it takes minutes, not hours?
How did they study it?
They combined ideas from robot design and learning, using simple but smart tools.
Key ideas explained in everyday language
- Degrees of freedom (DoF): This is how many ways the hand can move. More DoF means more separate joints you can control. For example, a 6-DoF hand has six controlled joints.
- Inverse kinematics (IK): Imagine you want your fingertip to touch a dot in space. IK is the math that figures out how each joint should bend so your fingertip reaches that dot. The authors purposely use this simple “point your fingertip here” controller both during design and after the hand is built.
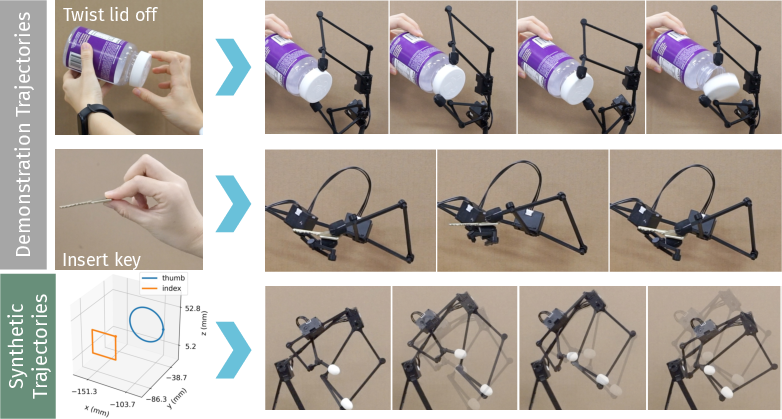
- Human motion data: They collected over 4 million frames of human thumb and index fingertip positions from everyday tasks (like twisting a lid or inserting a key). These fingertip paths are the targets the robot hand should match.
- Hand designs they explore:
- A “tree-structured” two-finger hand: one branch is like the thumb, the other is like the index finger.
- Fully actuated hands: every joint has its own motor (higher DoF, very flexible).
- Low-DoF hands with mimic joints: some joints are mechanically linked, so when one joint moves, another moves automatically. Think of it like a set of connected bars or gears that “mimic” motion, reducing motors and wiring. They use a kind of 3D four-bar linkage (called a Bennett linkage) to create these mimic motions.
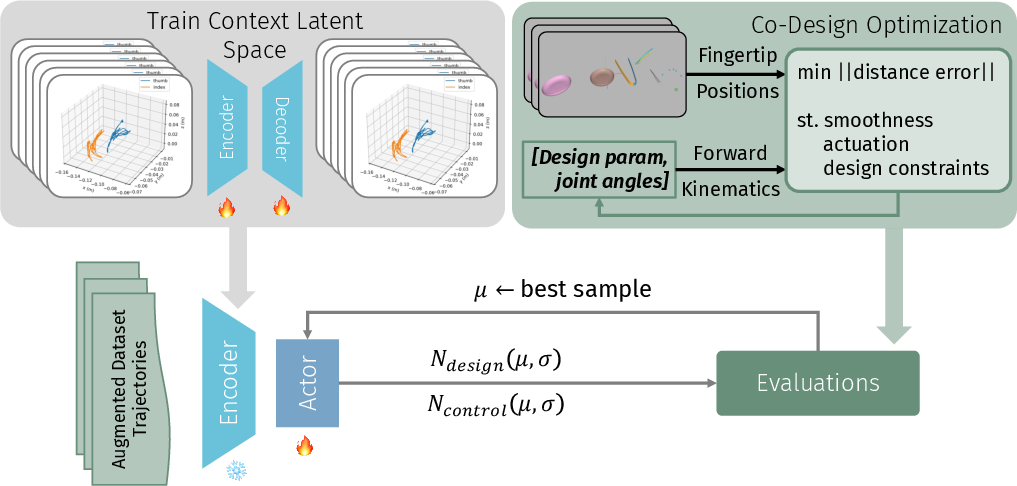
- Learning to propose good designs faster: Searching for the best hand shape can be slow. The authors train an “actor” (an AI helper) that looks at a target fingertip path and guesses a good starting design and joint setup. Then a quick fine-tuning step improves it. This cuts design time from hours to minutes.
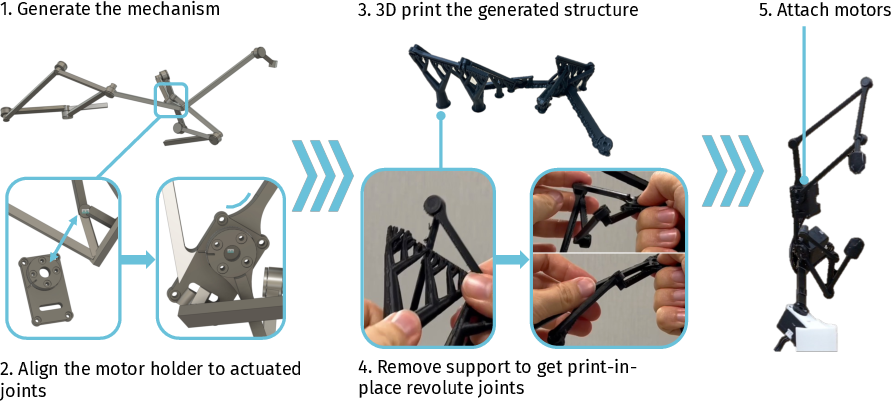
- 3D printing: Once a design looks good in simulation, they 3D print the hand as a single piece with “print-in-place” joints. After removing supports, the joints can rotate, and they attach motors.
What did they find, and why is it important?
- A 6-DoF general-purpose hand that’s very accurate:
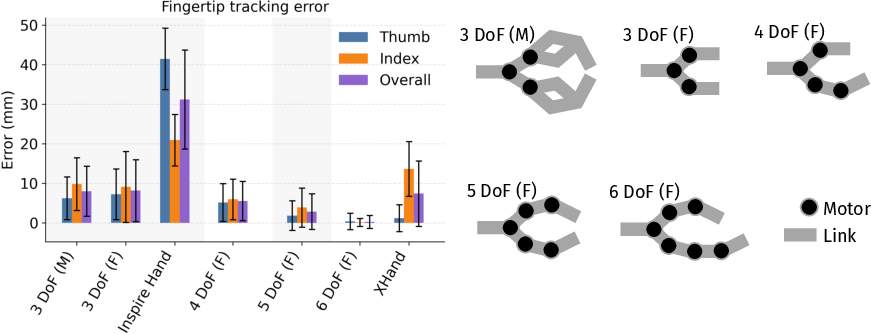
- It tracks human fingertip paths with about 0.24 mm average error overall (sub-millimeter!), and reaches over 95% of thumb and 98% of index frames within 1 mm.
- It outperforms two commercial robot hands they tested, even though one of those also has 6 DoF. This shows that good hardware shape matters, not just the number of joints.
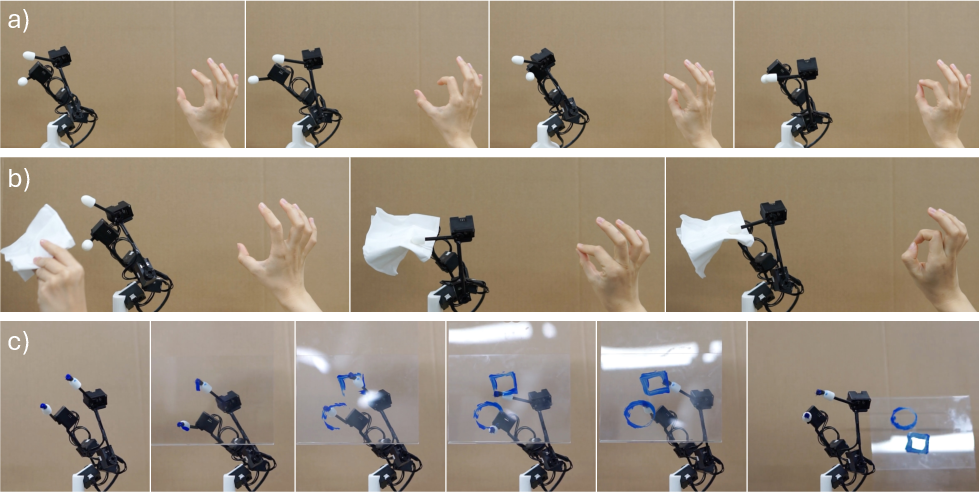
- In real tests, the hand can be teleoperated to perform precise gestures (like pinching and lifting a thin napkin) and also run programmed patterns (like drawing a circle with the thumb while the index draws a square).
- Simpler 3-DoF task-specific hands that still do the job:
- Using mimic joints, they built low-DoF hands tailored to specific motions like:
- Lid twisting: rotates a lid.
- Key insertion: holds and inserts a key.
- A synthetic “circle-and-square” path: thumb traces a circle, index traces a square.
- For some tasks (like the key-insertion and circle–square paths), the mimic-joint hands were more accurate than a normal 3-DoF hand, because the passive linkage naturally produces the needed motion shape. This means you can do more with fewer motors if your mechanism is cleverly designed.
- Faster design with the AI “actor”:
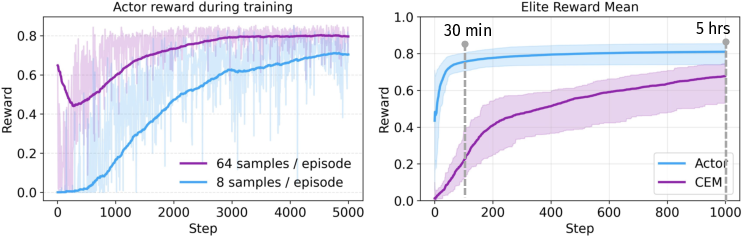
- The actor proposes strong starting points so the final design can be found in about 30 minutes.
- A standard search method without the actor can take 5 hours and still do worse. This makes rapid, iterative design much more practical.
Why this matters: The study shows that using human motion data is not only great for training robot control, but also for shaping the robot’s physical body so simple controllers work surprisingly well. That can mean cheaper, lighter, and more reliable hands that still perform accurately.
What could this change in the future?
- Easier teleoperation and learning: Robot hands that are shaped to match human motion can be controlled more simply and accurately, which helps in teleoperation (humans controlling robots remotely) and in learning from demonstrations.
- Lower-cost specialized tools: For common tasks (like opening packages or turning knobs), low-DoF hands with mimic joints could be cheaper, lighter, and easier to maintain—useful in factories, homes, and field robots.
- Faster design cycles: With the actor speeding up the search, designers can quickly explore many shapes and pick the best for a job.
Limits and next steps
- Current focus: only thumb and index fingertip positions. Real manipulation also needs understanding of contact forces, friction, and the whole hand (palm and multiple fingers).
- Narrow design family: two “fingers” with specific linkage types. Expanding to richer hands and palms could unlock more tasks.
- Fabrication: Some manual cleanup is still needed after 3D printing, and the printed hands aren’t strong enough yet for heavy-duty work.
Next steps could include modeling forces and object contact, adding more finger and palm designs, improving automatic CAD steps, and optimizing for strength and manufacturability. All of this would help move from precise motion matching to robust, real-world manipulation.
Knowledge Gaps
Knowledge gaps, limitations, and open questions
Below is a single, concrete list of gaps and open questions that remain unresolved and could guide future research:
- Only thumb–index fingertip positions are optimized; how would incorporating fingertip orientations, velocities/accelerations, and full-hand kinematics (middle/ring/little fingers and palm) change the optimal embodiments and tracking performance?
- The deployment controller is limited to inverse kinematics (IK); what designs emerge if optimization is aligned to alternative controllers (e.g., torque/impedance control, synergy-based retargeting, hybrid position–force control), and do these controllers enable lower-DoF hands to achieve comparable behaviors?
- Contact mechanics are absent from the objective; how can contact forces, friction, compliance, and object geometry be modeled and optimized jointly with hardware to ensure robust manipulation beyond free-space tracking?
- Evaluation relies on fingertip position error; what are the impacts on task success rate, speed, energy consumption, repeatability, and safety when evaluated on standardized manipulation benchmarks with physical objects?
- The design space is restricted to tree-structured two-finger linkages and Bennett-style mimic joints; what benefits and trade-offs arise from expanding to:
- Five-finger anthropomorphic hands and richer palm geometries,
- Non-tree topologies (e.g., closed chains, differentials),
- Underactuation via tendons, compliant elements, gears, or variable-stiffness mechanisms?
- Mimic joints are enforced via a softened residual during optimization, then “recovered” post hoc; how can closed-chain constraints be enforced during optimization to guarantee synthesizability, and what are the failure modes or geometric drift between optimized and fabricated linkages?
- Collision modeling uses centerline segments and a soft clearance penalty; how does full-geometry self-contact modeling (including finite thickness, joint housings, and motor fixtures) affect feasible designs and tracking accuracy?
- Structural strength, durability, and fatigue are not modeled; can structural analysis (e.g., FEA, anisotropic properties of 3D prints, wear/friction/backlash in print-in-place joints) be integrated into the objective to ensure load-bearing manipulation and long-term reliability?
- Actuation and transmission selection are not co-optimized; how should motor torque/speed, gear ratios, backlash, tendon routing, and joint torque limits be included to balance dexterity, speed, and strength under realistic power budgets?
- Sensing is limited to fingertip position teleoperation; what are the impacts of integrating tactile sensing, joint encoders, and force/torque sensors on both the design optimization and downstream manipulation policies?
- The framework assumes accurate wrist-frame alignment; what is the sensitivity to calibration errors or tracking noise, and can the design be made robust to teleoperation latency, sensor occlusions, and perceptual uncertainty?
- General-purpose claims are based on a two-finger, 6-DoF hand; for tasks requiring multi-contact and in-hand manipulation, what capabilities are missing, and how do designs scale to multi-finger hands without exploding the search complexity?
- Dataset coverage and diversity: the approach uses OakInk but optimizes only two fingertips; how does performance vary across subjects, hand sizes, object types, and task families, and can the method personalize embodiments to individual operators or task domains?
- Baseline fairness is unclear: were commercial hands calibrated and retargeted with identical IK and constraints? A rigorous, standardized retargeting protocol and per-hand calibration could clarify whether performance differences stem from hardware or mapping.
- DoF–performance–cost trade-offs are not systematically explored; can Pareto fronts (tracking accuracy vs. actuator count, weight, cost, wiring complexity) be produced to guide design choice under resource constraints?
- Actor-based initialization lacks ablations and guarantees; how do encoder architecture, reward shaping, number of samples, and training data distribution affect proposal quality, sample efficiency, and generalization to out-of-distribution trajectories?
- The actor’s proposal quality is shown for 3-DoF mimic-joint hands; does the learned proposal-and-refinement loop scale to higher DoFs and more complex mechanism families without mode collapse or overfitting?
- Real-world tests are limited (e.g., napkin pinch, lid twist); can the system be validated on a broader set of task suites (key insertion, fastening, tool use, in-hand reorientation) with quantitative success metrics and robustness under variable loads and materials?
- The fabrication pipeline requires manual interventions (unfusing joints, clearance checks, motor holder adjustments); which CAD automation, design-rule checks, and tolerance-aware synthesis steps can be added to make the pipeline fully automatic and reliable?
- Manufacturing tolerances and assembly variability are not considered; how do print resolution, material properties, post-processing, and motor mounting errors impact kinematics and tracking, and can the optimization include tolerance margins?
- Energy, thermals, and power distribution are ignored; how do designs perform under continuous operation, and can the objective penalize power usage or thermal hotspots to improve deployability?
- Safety analysis is absent; what mechanical design constraints (pinch-point avoidance, joint guarding) and controller-level safeguards are needed for safe teleoperation around humans?
- Orientation-aware tracking and contact patch alignment are unaddressed; does optimizing for fingertip normals and local surface geometry improve grasp quality and manipulation stability?
- Bimanual coordination (the dataset includes bimanual tasks) is not explored; how should the framework co-design two hands jointly (including inter-hand kinematic synergies) for coordinated manipulation?
- Adaptation post-fabrication is limited to IK; can online morphology adaptation (e.g., tunable compliance, adjustable couplings) or reconfigurable mechanisms be incorporated to extend capabilities without re-printing?
- Domain transfer is untested; do designs learned from OakInk generalize to different environments (industrial, outdoor), object sets, or sensing modalities, and what additional data or constraints are needed?
Practical Applications
Immediate Applications
The following applications can be deployed with today’s capabilities, given the paper’s demonstrated pipeline (IK-aligned co-design from human fingertip trajectories, actor-accelerated low-DoF design search, and print-in-place fabrication).
- Task-specific low-DoF grippers for repetitive motions in light-duty automation
- Sectors: robotics, manufacturing, lab automation, consumer goods (e.g., capping/uncapping, knob/valve turning, plug/key insertion, fixture actuation).
- Tools/products/workflows: trajectory-conditioned “motion-to-mechanism” generator that converts a short demonstration of the target motion into a 3-DoF end-effector with spatial four-bar mimic joints; automatically exports STL meshes with motor mounts for desktop 3D printing.
- Assumptions/dependencies: target task must be low-load and geometrically structured; two-finger pinch trajectories are sufficient; access to accurate demonstration capture (thumb–index trajectories), toleranced 3D printing, and small actuators; no force or tactile control is included.
- High-precision, low-cost teleoperation end-effectors tailored to operator motion
- Sectors: robotics, remote inspection/handling, research labs.
- Tools/products/workflows: 6-DoF general-purpose hand generated from large-scale human motion data; real-time inverse-kinematics controller; ROS/ROS2 package to stream human fingertip poses to the hand; print-in-place hardware that outperforms off-the-shelf hands in mm-level tracking accuracy for pinch gestures.
- Assumptions/dependencies: reliable human hand tracking (e.g., camera+pose estimation) for thumb–index; low-to-moderate payloads; integration with existing robot arms; no haptic/force feedback.
- Rapid prototyping of SKU-/fixture-specific end-effectors in R&D and pilot lines
- Sectors: advanced manufacturing, electronics assembly, testing/QA fixtures.
- Tools/products/workflows: a “demo-to-STL” pipeline that lets engineers record a few seconds of a target repetitive motion (e.g., align-and-insert, turn-and-lift) and obtain a low-DoF, passively coupled mechanism with reduced wiring and simpler control; same-day prints for iteration.
- Assumptions/dependencies: repeatable geometry and alignment; low torque requirements; calibration of the mounted end-effector to the arm/tool frame.
- Quantitative procurement/benchmarking of robot hands against human-motion coverage
- Sectors: robotics procurement, corporate R&D, academia.
- Tools/products/workflows: a benchmarking suite using large human manipulation datasets to score candidate hands by fingertip tracking coverage/error; supports make/buy decisions and design iteration.
- Assumptions/dependencies: representativeness of the motion dataset for target tasks; consistent evaluation setup.
- Education and training kits for co-design and digital fabrication
- Sectors: education (university courses, maker spaces), workforce upskilling.
- Tools/products/workflows: course modules where students record simple motions, auto-generate mechanisms, and 3D print print-in-place joints; demonstrates co-design, kinematics, and fabrication.
- Assumptions/dependencies: access to standard FDM printers, hobby motors, and basic mechatronics; focus on low-load demonstrations.
- Research testbed for morphology–control co-design
- Sectors: academia (robotics, design automation, machine learning for mechanisms).
- Tools/products/workflows: open-source pipeline combining differentiable kinematics, IK-aligned objectives, and RL-based initialization; ablations across DoF and mimic joints to study embodiment effects.
- Assumptions/dependencies: familiarity with gradient-based optimization, RL training infrastructure, and CAD/mesh post-processing.
Long-Term Applications
These applications require further research and engineering (e.g., adding contact forces, compliance, richer mechanism families, full-hand dexterity, stronger materials, automated CAD), scaling, and/or certification.
- Personalized prosthetic and assistive devices that encode user-specific motion synergies
- Sectors: healthcare, assistive technology.
- Tools/products/workflows: capturing a patient’s habitual motions to generate underactuated, passively coupled hands or assistive tools that reduce actuator count while reproducing functional movement patterns; integration with EMG/intent decoding.
- Assumptions/dependencies: clinical-grade strength, safety, and durability; regulatory approval; inclusion of force models, comfort, and skin–device interfaces; beyond two-finger kinematics.
- On-demand, data-driven end-effector libraries for fulfillment and logistics
- Sectors: warehousing, e-commerce, retail automation.
- Tools/products/workflows: a “SKU-to-gripper” service that records exemplar human interactions with new items and auto-compiles low-DoF, energy-efficient mechanisms matched to item-specific motions; micro-factory printing and rapid deployment.
- Assumptions/dependencies: force-aware objectives for reliable grasping, integration with perception for alignment, stronger materials, and robust maintenance workflows.
- General-purpose, human-like hands tailored to service/home robots
- Sectors: consumer robotics, hospitality, eldercare.
- Tools/products/workflows: expanded co-design to full-hand kinematics (multi-finger + palm) and contact objectives, yielding embodiments that make everyday household manipulation easier for simple controllers.
- Assumptions/dependencies: richer design spaces (beyond tree linkages), tactile sensing, compliance and safety, higher payload capability, and manufacturability at scale.
- Precision teleoperation for surgery, micro-assembly, and hazardous environments
- Sectors: healthcare (surgery), semiconductor/micro-assembly, energy (nuclear), space/undersea.
- Tools/products/workflows: operators’ fine motor patterns compiled into sterilizable, radiation/pressure-tolerant end-effectors with passive couplings that reduce wiring and failure modes; haptic feedback added.
- Assumptions/dependencies: medical- or mission-grade materials and sterilization; force and stability modeling; stringent certification; robust teleop interfaces.
- “Motion-to-mechanism” CAD compilers integrated with industrial toolchains
- Sectors: software/CAD, robotics OEMs, digital manufacturing.
- Tools/products/workflows: plugins for ROS/CAD (e.g., Fusion/Onshape/SolidWorks) that take calibrated demonstrations and emit parametric assemblies (with mimic linkages, motor mounts, tolerances), FE analysis, and BOM; cloud-based design search.
- Assumptions/dependencies: automated constraint repair, collision-proof routing, manufacturability checks, and structural optimization baked into the pipeline.
- Standardization and policy for data-driven mechanism generation
- Sectors: policy/regulation, standards bodies.
- Tools/products/workflows: datasets, evaluation suites, and conformance tests that certify safety, reliability, and lifecycle impact of auto-generated mechanisms; guidelines for sharing human motion data (privacy, consent) and verifying 3D-printed joints.
- Assumptions/dependencies: multi-stakeholder processes for safety/privacy; harmonization with existing ISO/ASTM standards for robotics and additive manufacturing.
- Energy- and cost-efficient end-effectors via passive kinematic intelligence
- Sectors: energy-conscious robotics, sustainability.
- Tools/products/workflows: systematic use of mimic joints to reduce actuator count, wiring, and power while preserving task performance; fleet-level optimization for shared tasks.
- Assumptions/dependencies: validated models for energy savings vs. throughput; long-term wear testing of passive linkages.
- Large-scale educational ecosystems for embodied AI and co-design
- Sectors: education, workforce development.
- Tools/products/workflows: standardized curricula, simulators, and low-cost kits that teach students to “compile” motions into devices; shared repositories of parametric designs and trajectory datasets.
- Assumptions/dependencies: robust, classroom-safe hardware; funding for open datasets and hardware sharing.
Cross-cutting assumptions and dependencies (impacting feasibility across use cases)
- Data quality and coverage: availability of representative, clean thumb–index motion trajectories (or future full-hand data) for the target tasks.
- Controller alignment: success hinges on using the same simple controller (IK) at deployment as in design; tasks requiring force/impedance control need extended objectives.
- Fabrication and materials: print-in-place joints and consumer-grade plastics limit load and durability; industrial variants need stronger materials and precise tolerances.
- Design space limits: current pipeline assumes two-finger, tree-structured mechanisms and Bennett-style mimic joints; broader mechanism families and palms require expansion.
- Integration: reliable hand-tracking or teleop interfaces, actuator/electronics availability, ROS integration, and calibration workflows.
- Safety and certification: medical and high-stakes deployments require regulatory pathways, redundancy, and extensive reliability testing.
Glossary
- Actor (RL): A policy network in reinforcement learning that proposes actions (here, design and angle initializations) given context. "we trained a reinforcement-learning (RL) actor to propose good hand designs and joint angles"
- Bennett joints: A specific spatial four-bar linkage with unique geometric conditions that couples rotations between axes. "namely Bennett joints~\cite{perez2002bennett}"
- Bennett link-closure constraints: Geometric constraints enforcing the closed-loop conditions of a Bennett linkage so its motion is physically realizable. "Bennett link-closure constraints for mimic joints."
- Clearance radius: A minimum distance buffer used to penalize or prevent collisions between mechanism links. "and is a clearance radius."
- Co-design: Joint optimization of a robot’s hardware (morphology) and control policy. "This naturally suggests co-design: jointly optimizing hardware and control."
- Continuous 6D representation: A rotation parameterization using two 3D vectors that avoids discontinuities and is suitable for gradient-based optimization. "representing joint rotations with the continuous 6D representation"
- Cross-Entropy Method (CEM) search: A stochastic optimization algorithm that iteratively refines a sampling distribution toward high-performing solutions. "Cross-Entropy Method (CEM) search~\citep{rubinstein2004cross}"
- Degrees of freedom (DoF): The number of independent coordinates specifying a mechanism’s configuration. "6-degree-of-freedom (DoF) general-purpose hand"
- Differentiable co-design optimization: Gradient-based joint optimization of design parameters and controls through differentiable models. "Each candidate is evaluated by differentiable co-design optimization"
- Forward kinematics: The mapping from joint angles and link parameters to end-effector positions and orientations. "We formulate the forward kinematics as a differentiable process"
- Half-angle relation: A kinematic relation expressing one joint angle as a function of another via half-angle trigonometric functions. "We use a half-angle relation for a mimic joint"
- Inverse kinematics: Computing joint configurations that achieve desired end-effector positions. "matching fingertip positions through inverse kinematics."
- Inverse-kinematics controller: A control method that solves inverse kinematics online to achieve target positions during execution. "under the same inverse-kinematics controller used after fabrication"
- Kinematic bottleneck: A limitation in reachable motions caused by insufficient or poorly arranged degrees of freedom. "The final degree of freedom resolves a kinematic bottleneck in jointly positioning the two fingertips."
- Mimic joint: A passive mechanical coupling where a child joint’s motion is a function of a parent joint, reducing actuation needs. "spatial four-bar mimic joints"
- Multilayer perceptron (MLP): A feedforward neural network composed of multiple fully connected layers. "The actor is a 3-layer Multilayer perceptron (MLP)."
- Nonconvex search space: An optimization landscape with many local minima and no guarantee that local improvements lead to a global optimum. "These constraints introduce a highly nonconvex search space:"
- Nonlinear least squares: An optimization method that fits parameters by minimizing the sum of squared nonlinear residuals. "recovered by nonlinear least squares for fabrication."
- Print-in-place joints: 3D-printed joints fabricated as part of a single build so they articulate after support removal without assembly. "print-in-place joints."
- Revolute joint: A hinge-like joint that allows rotation about a single axis. "the revolute joints can rotate in place"
- Retargeting: Mapping motion from one kinematic system (e.g., human hand) to another (e.g., robot hand). "Retargeting can map human motions to an existing robot hand"
- Sigmoid-normalized: Scores or penalties scaled through a sigmoid function to map values into a bounded range. "a reward that combines final tracking loss, linkage collision penalty, and angle-consistency penalty ... where each score is a sigmoid-normalized preference"
- Spatial four-bar: A closed-loop four-link mechanism operating in three dimensions, enabling coupled out-of-plane motions. "related to the formulation of the Bennett spatial four-bar."
- Teleoperation: Remote human control of a robot in real time. "Under real-time teleoperation, the generated hand tracks open-hand, partially flexed, and pinch-like gestures."
- Trajectory-conditioned actor: An actor network that proposes initial designs and joint angles based on an encoded representation of the target trajectory. "we train a trajectory-conditioned actor that proposes hardware and joint-angle initializations"
- Tree-structured linkage: A branching kinematic structure without closed loops, rooted at a base (e.g., the wrist). "The hand is modeled as a tree-structured linkage rooted at the wrist"
- Workspace: The set of positions and orientations that an end-effector can reach. "since it lies within the workspace of a hand"
- Wrist frame: A coordinate frame attached to the wrist used as a reference for expressing fingertip positions. "in the wrist frame,"
Collections
Sign up for free to add this paper to one or more collections.

