From Power to Precision: Learning Fine-grained Dexterity for Multi-fingered Robotic Hands
Abstract: Human grasps can be roughly categorized into two types: power grasps and precision grasps. Precision grasping enables tool use and is believed to have influenced human evolution. Today's multi-fingered robotic hands are effective in power grasps, but for tasks requiring precision, parallel grippers are still more widely adopted. This contrast highlights a key limitation in current robotic hand design: the difficulty of achieving both stable power grasps and precise, fine-grained manipulation within a single, versatile system. In this work, we bridge this gap by jointly optimizing the control and hardware design of a multi-fingered dexterous hand, enabling both power and precision manipulation. Rather than redesigning the entire hand, we introduce a lightweight fingertip geometry modification, represent it as a contact plane, and jointly optimize its parameters along with the corresponding control. Our control strategy dynamically switches between power and precision manipulation and simplifies precision control into parallel thumb-index motions, which proves robust for sim-to-real transfer. On the design side, we leverage large-scale simulation to optimize the fingertip geometry using a differentiable neural-physics surrogate model. We validate our approach through extensive experiments in both sim-to-real and real-to-real settings. Our method achieves an 82.5% zero-shot success rate on unseen objects in sim-to-real precision grasping, and a 93.3% success rate in challenging real-world tasks involving bread pinching. These results demonstrate that our co-design framework can significantly enhance the fine-grained manipulation ability of multi-fingered hands without reducing their ability for power grasps. Our project page is at https://jianglongye.com/power-to-precision


Paper Prompts
Sign up for free to create and run prompts on this paper using GPT-5.
Top Community Prompts
Explain it Like I'm 14
Overview: What is this paper about?
This paper is about teaching robot hands to be both strong and precise—like humans. Human hands use two main types of grips:
- Power grips: wrapping your whole hand around something big (like holding a frying pan).
- Precision grips: using your fingertips to carefully pinch and move small things (like picking up a nut or inserting a battery).
Robot hands are already good at power grips, but they struggle with delicate, precise movements. The researchers created a method that combines smart control software with a small hardware upgrade to help multi-fingered robot hands do both types of tasks well.
Objectives: What questions were the researchers trying to answer?
The team focused on three simple goals:
- How can we make existing robot hands better at precise fingertip work without rebuilding them from scratch?
- Can one hand and one control system handle both power and precision tasks?
- Will the method work both in simulation (virtual testing) and in the real world?
Methods: How did they do it?
The approach has two parts that work together: smarter control and a small hardware tweak.
Smarter control: choosing and simplifying movements
- Think of a robot hand like a toolbox with many tools (its fingers). For small objects, using all tools at once is confusing and fragile.
- The researchers made the hand “switch modes” based on the object:
- Power mode for big, heavy items.
- Precision mode for small, thin, or delicate items.
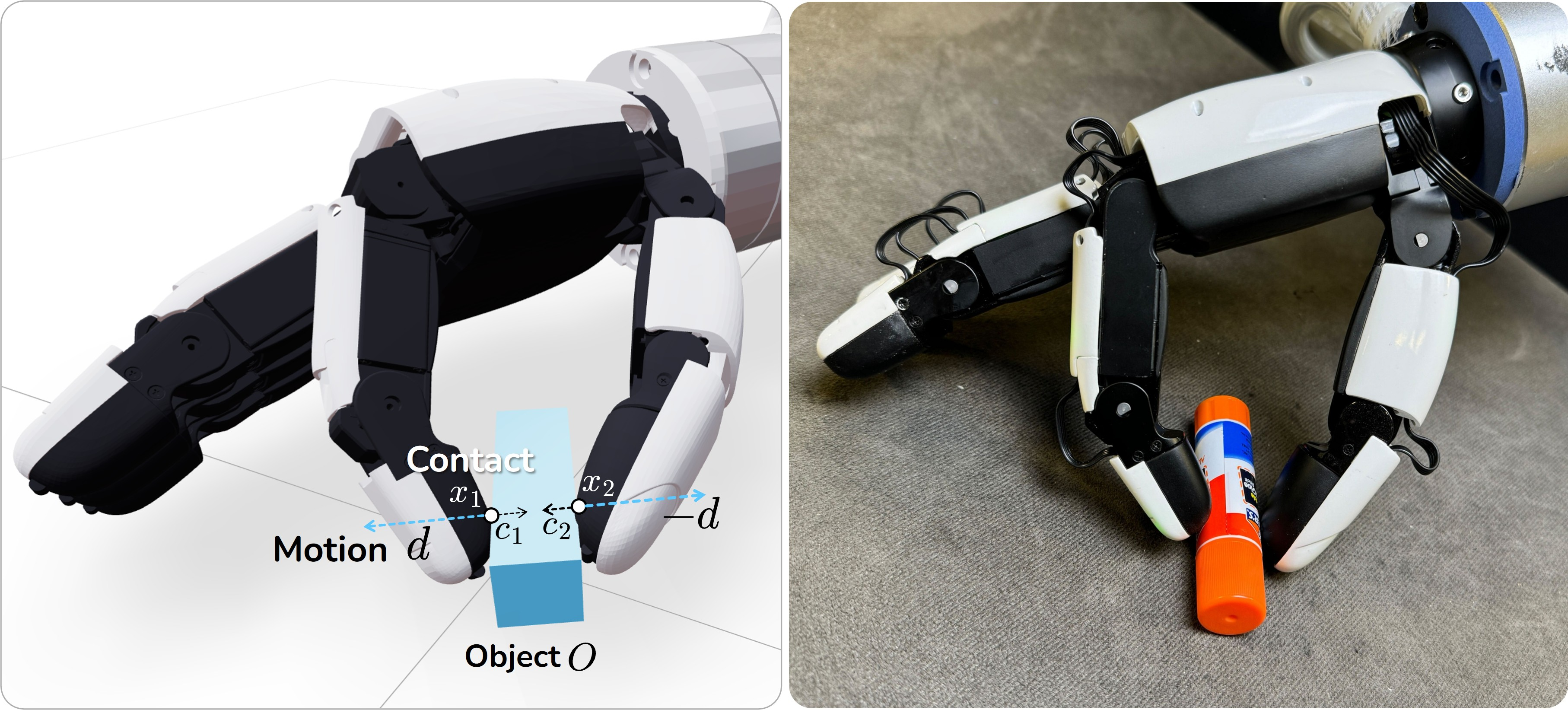
- In precision mode, they simplified the hand’s movement to act like a pair of tweezers:
- Only the thumb and index finger move.
- They move straight toward each other in parallel, like chopsticks closing on a noodle.
- A “neural switcher” (a small AI classifier) looks at the object and decides which mode to use.
Small hardware upgrade: better fingertip covers
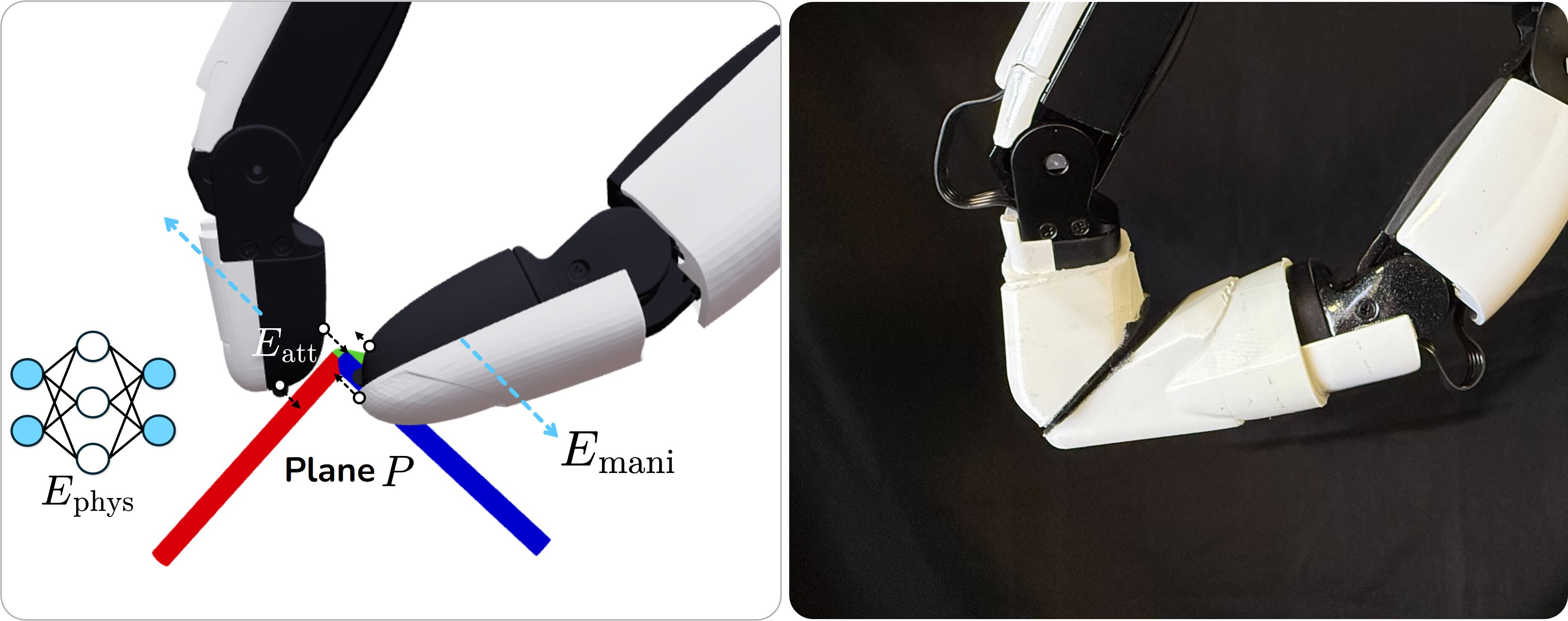
- Instead of redesigning the whole hand, they added simple, 3D-printed fingertip covers.
- These covers are shaped by imagining a flat contact “plane” on each fingertip—like a small, flat pad that gives more surface to pinch tiny items.
- They tested many designs in large-scale simulation and trained a “neural physics” model (a learned predictor) to pick designs that would work best in real life. Think of it like trying many prototypes in a video game and teaching an AI to guess which shape will be best before you print it.
Training and validation: learning from examples
- Imitation learning: The robot learns by watching example actions (demonstrations) collected in two ways:
- Simulation demos for grasping many different objects.
- Teleoperation demos (a person controls the robot remotely) for tricky real-world tasks.
- They trained two policies (control programs):
- One for power grasps.
- One for precision grasps.
- The neural switcher decides which policy to apply at run time.
Simple explanations of technical terms
- Simulation to real (“sim-to-real”): Training in a virtual world, then using it on a real robot.
- Surrogate model: A quick AI “shortcut” that predicts how well a design will work, instead of running slow physics every time.
- Parallel finger motion: Fingers move straight toward each other, like closing a pair of tongs.
- Teleoperation: A human moves the robot using a controller; the robot records these moves as examples to learn from.
Results: What did they find and why is it important?
Main findings:
- Precision grasps in the real world improved dramatically:
- Against a strong baseline, their method achieved 82.5% success on unseen objects in zero-shot sim-to-real tests (meaning no fine-tuning on those objects), compared to 12.5% for the baseline.
- Power grips remained strong:
- Their upgrades didn’t hurt the robot’s ability to hold big objects securely.
- Real-world task performance was much better on delicate jobs:
- Bread pinch: 93.3% success (hard because pressing too hard crushes the bread).
- Nut onto peg (tiny M4 nut onto an M3 bolt): 66.7% success.
- Cooking setup: picking asparagus (precision) and lifting a pan (power) in sequence reached 73.3% success.
- Multi-pen grasp and battery insert tasks also showed strong gains.
Why this matters:
- By simplifying precision moves (thumb + index closing in parallel) and improving fingertip shapes, the robot became more reliable at tiny, delicate tasks. This is important for real-world jobs like assembly, packaging, kitchen work, or lab automation.
Implications: What could this change?
- Practical upgrades: You don’t need to buy new robot hands—simple fingertip covers and smarter control can make existing hands much better at delicate work.
- Fewer sensors needed: The method works without expensive tactile sensors, relying on good control and smart design.
- Better sim-to-real transfer: Simple, robust motions (like parallel pinching) make it easier for robots to perform in the messy real world, not just in clean simulations.
- Broader use: This approach could help robots handle a wider range of tasks—from heavy lifting to precise assembly—making them more useful in factories, kitchens, hospitals, and homes.
In short: The paper shows a practical way to make robot hands both strong and careful by combining a tiny hardware upgrade with simple, smart control.
Knowledge Gaps
Below is a consolidated list of the paper’s unresolved knowledge gaps, limitations, and open questions that future work could address:
- Precision control is limited to thumb–index pinches with parallel motions; the framework does not explore other precision grasp types (tripod, lateral pinch, tri-digital, ring–thumb) or in-hand reorientation/rolling that require coordinated multi-finger dynamics.
- The neural switcher classifies only “power vs precision” based on object geometry; task context, multi-step sequences, and dynamic within-task switching (e.g., changing grasp modes mid-trajectory) are not evaluated, especially in real-world autonomous executions.
- Position-based Jacobian pseudoinverse control lacks explicit force/torque regulation and tactile feedback; contact forces are not measured or limited, which is risky for delicate objects (e.g., bread pinch) and makes closed-loop contact control an open need.
- Fingertip geometry is constrained to a single flat contact plane; alternative shapes (V-groove, concave/convex surfaces, compliant skins, textured or anisotropic friction surfaces) and task-conditioned geometries are not compared or optimized.
- Material properties of the fingertip covers (e.g., friction coefficient, stiffness/compliance, surface finish, thickness) and their impact on grasp stability, small-object precision, and power-grasp capacity are not characterized.
- Long-term durability, wear, and maintenance of 3D-printed covers are untested; effects of repeated cycles, deformation, surface polishing, and attachment stability over time remain unknown.
- Trade-offs introduced by the geometry modification on power grasps are only assessed via success rates; quantitative analysis of payload capacity, maximal disturbance rejection, and force-closure margins is missing.
- The neural physics surrogate is trained solely on simulated outcomes; model accuracy, calibration to real-world dynamics, and any sim-to-real adaptation strategies are not reported.
- External perturbation forces are kept during evaluation but are not calibrated to real-world magnitudes or contact conditions; it’s unclear how these disturbances map to realistic deployment scenarios.
- Object categorization into “precision vs power” is derived from optimization success rather than human-defined semantics or task requirements, potentially biasing dataset composition and learned policies.
- Generalization across hardware is validated on only two platforms (XHand, Inspire/G1); transfer to other multi-fingered hands (e.g., Allegro, Shadow, Robotiq) with different kinematics and fingertip morphologies remains unproven.
- Perception relies on point clouds; robustness under occlusions, small-object visibility, transparent/reflective materials, and cluttered scenes is not evaluated, nor are multi-view or active perception strategies.
- Real-to-real training uses small demonstration sets (15 per task) with limited diversity; sample efficiency, generalization to more objects/tasks, and cross-operator variability are not analyzed.
- No direct baseline against high-quality two-finger parallel grippers on the same precision tasks; it remains unclear whether the proposed system meets or exceeds the performance of specialized parallel grippers.
- The pre-grasp parallel motion uses a fixed step size α and open-loop planning; adaptive step sizing, closed-loop visual/tactile servoing, and on-the-fly error correction are not incorporated or tested.
- During precision grasps, non-thumb–index fingers are fixed; whether additional fingers could be used as passive stabilizers or active aids without degrading precision is unexplored.
- The precise grasp optimization success rate in simulation is low (5.35%); bottlenecks such as objective weighting, contact sampling (n), Jacobian conditioning, and non-convexity of the search space need diagnosis and improved formulations.
- The surrogate’s predictive performance (metrics, calibration, uncertainty) is not reported; without accuracy/uncertainty quantification, the contribution of E_phys is hard to interpret or trust for design choices.
- Autonomous policy and grasp-mode switching are handled in separate pipelines (DexSimple + switcher for sim-to-real; ACT for real-to-real); a unified, end-to-end autonomous framework with integrated switching is not demonstrated.
- Real-time performance (latency, compute footprint) of the switcher and policies is not reported; feasibility on embedded hardware and responsiveness during fast manipulation remain open.
- Safety constraints (max contact force/torque, collision avoidance with environment, emergency stop thresholds) are not explicitly encoded in the controllers or learning objectives.
- Task diversity is limited; precision tasks involving tight-tolerance insertions (beyond “nut onto peg”), screw driving, key insertion, or deformable/porous/soft objects are not comprehensively evaluated.
- Failure modes are not systematically analyzed; categorization of slips, misalignments, occlusions, joint-limit violations, and corrective strategies (e.g., regrasp, recovery behaviors) are missing.
- Manufacturing reproducibility is insufficiently detailed; sensitivity to print tolerances, post-processing (sanding, coating), surface roughness, and installation/calibration procedures should be quantified for replication.
- The effect of optimized fingertip geometry on sensor integration (e.g., compatibility with embedded tactile sensors or vision-in-the-hand) is not considered; co-design with sensing remains an open direction.
- Policy inputs exclude explicit hand state abstractions (e.g., gripper aperture estimation); whether richer proprioceptive/force/tactile representations would improve learning and robustness is untested.
- Bread pinch and battery insert successes are presented on limited instances; systematic benchmarking across varied breads (thickness, moisture), battery types/sockets (fit tolerances), and quantitative metrics (pose error, insertion force) are not provided.
- Complex regrasping and tool-use sequences (e.g., in-hand reorientation before insertion, handovers) are not studied; extending beyond single pinch/power events is a key open challenge.
- Accessibility and reproducibility are unclear; public release of CAD for covers, optimization code, objective weights, trained switcher/surrogates, and datasets would enable independent validation and broader adoption.
Practical Applications
Immediate Applications
The following items translate the paper’s findings into deployable use cases across sectors. Each item notes potential tools/workflows and key assumptions or dependencies that affect feasibility.
- Retrofit fingertip covers to upgrade existing robot hands for precision work — sectors: manufacturing, warehousing, service robotics
- What: 3D-printable, plane-based fingertip covers that increase contact area and stability for thumb–index pinches, installed on commercial multi-fingered hands (e.g., XHand, Inspire).
- Tools/products/workflows: “Fingertip Cover Generator” that outputs STL from a hand model; installer jig; materials selection guide (friction, durability).
- Assumptions/dependencies: Accurate CAD/mesh for the hand; suitable 3D-print materials (food-safe as needed); simple attachment mechanism; hand kinematic calibration.
- Precision bin-picking and kitting of small parts — sectors: electronics manufacturing, automotive, general assembly, warehousing/e-commerce
- What: Robust pinch grasps of pens, nuts, batteries, small fixtures; mode switching between power and precision for mixed kits.
- Tools/products/workflows: “Grasp Mode Switcher” (PointNet+MLP) with a two-policy stack (power/precision); “Precision Pinch Controller” that generates parallel thumb–index motions via Jacobian pseudoinverse; ROS/MoveIt integration.
- Assumptions/dependencies: Reliable point-cloud perception; SKU/object classification to drive mode selection; consistent friction at fingertips; light lateral disturbances within trained bounds.
- Delicate food handling in packaging and prep — sectors: food & beverage, retail kitchens, commissaries
- What: Gentle pinch of deformable items (bread slices, asparagus) and stable power grasps (pan handles) on the same hand without swapping end-effectors.
- Tools/products/workflows: Task recipes that sequence precision then power grasps (e.g., pick asparagus then move pan); camera-only ACT/DexSimple policies trained on modest demos.
- Assumptions/dependencies: Food-safe, washable fingertip materials; compliance with hygiene standards; calibrated force/position control to avoid over-pressing.
- Electronics sub-assembly staging — sectors: electronics assembly, battery manufacturing
- What: Place nuts on bolts/pegs, insert cylindrical cells into holders/chargers where force and alignment must be precise but torqueing is minimal.
- Tools/products/workflows: “Peg/Groove Pinch Skill” templates with Jacobian-based parallel motion and overshoot poses; quality gates (vision checks) for seated/latched state.
- Assumptions/dependencies: No requirement for threading/torque (beyond scope); precise camera calibration and bolt/slot detection; consistent tolerances.
- Lab automation: handling small labware — sectors: biotech/pharma R&D labs, diagnostics
- What: Pinch-lift-and-place microtubes, slides, small caps in trays with reduced risk of slips or crushing, using a single dexterous hand.
- Tools/products/workflows: Dataset of labware geometries; low-shot ACT policies trained on teleop demonstrations using the pinch controller; safe speed/force limits.
- Assumptions/dependencies: Cleanable/chemical-resistant fingertip covers; reliable detection of clear/translucent objects; contamination control procedures.
- Teleoperation enhancement for data collection and on-the-loop execution — sectors: robotics R&D, remote operations, education
- What: Use the optimized thumb–index pinch controller in teleop to improve precision grasp demos and reduce operator fatigue (mapping fingertip distance to pinch aperture).
- Tools/products/workflows: Teleop UI plugin; retargeting module that toggles between normal and pinch modes; logging pipeline for ACT/DexSimple training.
- Assumptions/dependencies: Low-latency teleop; hand–arm kinematic mapping; basic operator training.
- Simulation-driven end-effector quick design service — sectors: robotics OEMs/integrators, contract manufacturing
- What: Offer a cloud or offline service that takes a hand model and target object set, runs the neural-physics surrogate, and outputs optimized fingertip covers.
- Tools/products/workflows: “Neural Physics Surrogate SDK” (PointNet+MLP) with batch object sampling; design scoring dashboard (success probability, manipulability); STL export.
- Assumptions/dependencies: Representative object point clouds; licensing for simulator assets; periodic recalibration if the object mix drifts.
- Education and academic labs: co-design + sim-to-real teaching kits — sectors: education, academic research
- What: A turnkey pipeline demonstrating control–design co-optimization on commodity hands; repeatable benchmarks (with lateral disturbance forces).
- Tools/products/workflows: Course labs that include the switcher, pinch controller, differentiable surrogate optimization, and sim-to-real evaluation harness.
- Assumptions/dependencies: Access to a multi-fingered hand; 3D-printing capability; open-source policy weights or small demo sets for re-training.
Long-Term Applications
These applications require additional research, scaling, integration with tactile/force sensing, or regulatory approval.
- Flexible fine-assembly cells (connector insertion, wire routing, screw starting) — sectors: electronics, automotive, appliances
- What: Move beyond placement to contact-rich insertions and initiating threads; automatic switching across dexterous primitives.
- Tools/products/workflows: Tactile-integrated pinch controller; impedance control; learned contact models; richer co-design (curved/structured fingertip geometries).
- Assumptions/dependencies: High-fidelity tactile sensing; force-limited controllers; tighter calibration and uncertainty handling.
- General-purpose household assistants with safe dexterity — sectors: consumer robotics, smart home
- What: Home tasks mixing power and precision (organizing small items, battery swaps, light cooking prep) on humanoids/mobile manipulators.
- Tools/products/workflows: Household object mode-switch datasets; safety-certified fingertip materials; continual-learning loops for new objects.
- Assumptions/dependencies: Robust perception in clutter; safety and privacy compliance; long-term wear resistance of covers.
- Healthcare and assistive robotics for delicate item handling — sectors: healthcare, eldercare, rehabilitation
- What: Handling medications, packages, garments with gentle pinches; preparing simple items without damage.
- Tools/products/workflows: Clinically validated pinch behaviors; easy-clean, sterilizable, or disposable fingertip covers; task-specific policies with guardrails.
- Assumptions/dependencies: Regulatory approvals (e.g., FDA/CE); strict hygiene protocols; redundant safety layers and human-in-the-loop oversight.
- Adaptive or reconfigurable fingertip surfaces — sectors: robotics hardware, materials
- What: Fingertips that change geometry or compliance on demand (e.g., adjustable planes, soft morphing pads) to widen the precision–power envelope.
- Tools/products/workflows: Real-time co-design-in-the-loop that updates geometry parameters; embedded sensing to close the loop.
- Assumptions/dependencies: Mature variable-stiffness/morphing materials; fast, safe actuation; co-optimization that runs online.
- Autonomously generated end-effector variants per SKU and per line — sectors: manufacturing, logistics
- What: MLOps for gripper design—continuous redesign and print of fingertip covers as product mix changes; automated validation in simulation-in-the-loop.
- Tools/products/workflows: Design CI/CD; digital warehouses of validated geometries; rapid post-processing and QA of printed parts.
- Assumptions/dependencies: Reliable print farms; lifecycle management for wear; governance for change control.
- Humanoid manipulation in retail and back-of-house operations — sectors: retail, hospitality
- What: Restocking and organizing small, deformable, and boxed items with a single hand that fluidly shifts between precision and power grasps.
- Tools/products/workflows: Shelf-aware grasp mode switchers; SKU-specific policies; safety envelopes for operation near people.
- Assumptions/dependencies: Robust navigation and perception stacks; compliance with occupational safety standards.
- Standards and policy: dexterity benchmarks and safety metrics for general-purpose hands — sectors: policy, industry consortia
- What: Establish test suites (including lateral disturbance forces) for precision grasp reliability, damage avoidance, and mode-switch correctness.
- Tools/products/workflows: Open benchmarks and scoring protocols; reference tasks (e.g., “bread pinch,” “nut-on-peg”); certification programs.
- Assumptions/dependencies: Multi-stakeholder coordination; reproducible test hardware; agreement on metrics and thresholds.
- High-reliability telerobotics in hazardous domains — sectors: nuclear, chemical, space
- What: Remote manipulation of small vials, valves, and connectors with precision pinches; reduced task failure due to better contact geometry.
- Tools/products/workflows: Hardened teleop stack with pinch controller; radiation/temperature-resistant covers; redundancy and fault detection.
- Assumptions/dependencies: Extreme reliability requirements; environmental compatibility; rigorous operator training.
Cross-cutting assumptions and dependencies
- Perception: The switcher and policies assume reliable point-cloud or RGB-D sensing, object segmentation, and calibrated hand–eye transforms.
- Control: Accurate Jacobians and joint tracking; stable low-level controllers; optionally, force/impedance control for contact-rich tasks.
- Materials and wear: Fingertip cover friction and durability strongly influence success; periodic inspection and replacement may be required.
- Sim-to-real gap: The reported robustness benefits from flat-plane contacts and parallel motions; large domain shifts (lighting, surfaces, object friction) still require adaptation.
- Safety and compliance: Human-facing deployments need speed/force limits, fail-safes, and appropriate certifications (especially in food and healthcare settings).
Glossary
- ACT (Action Chunking Transformer): A transformer-based policy architecture that outputs sequences of actions for robot control. "Finally, an ACT policy~\cite{zhao2023learning} is trained on these teleoperated demonstrations for deployment."
- Co-design: Joint optimization of hardware (morphology) and control within a unified framework. "This versatility and dexterity are achieved through a co-design framework for both control and fingertip-geometry optimization."
- Contact plane: A planar representation of fingertip contact geometry used to simplify and optimize precision manipulation. "represent it as a contact plane, and jointly optimize its parameters along with the corresponding control."
- Convex hull: The smallest convex shape enclosing a set of points; used here to derive printable fingertip covers. "Given , we project a slightly inflated convex hull of the fingertip onto it and 3D print the resulting union geometry."
- Directional manipulability: A measure of how easily an end-effector can move in a specified direction given kinematic constraints. "We measure this using directional manipulability~\cite{yoshikawa1985manipulability}:"
- Force closure: A grasp condition where contact forces can counteract any external wrench, yielding a stable hold. "a common way to collect demonstrations for dexterous grasping is to first optimize for force closure and then apply motion planning combined with simulation filtering"
- Grasp map: A matrix mapping fingertip contact forces to the resultant wrench on the object. "The grasp map is"
- Grasp synthesis: Computational generation of grasp configurations that satisfy task-specific objectives or constraints. "thumb-index motion generation for both grasp synthesis and real-world teleoperation."
- Jacobian pseudoinverse: The Moore–Penrose inverse of the Jacobian used to compute joint updates that achieve desired Cartesian motions. "The required joint velocity are calculated using the Jacobian pseudoinverse "
- ManiSkill: A physics-based robot manipulation simulator used for data filtering and policy training. "All demonstrations are filtered using the ManiSkill simulator~\cite{taomaniskill3}."
- MLP (Multi-Layer Perceptron): A feedforward neural network composed of multiple fully connected layers. "We then add a switcher consisting of PointNet~\cite{qi2017pointnet} and an MLP to predict whether an object should be grasped with a power grasp or a precision grasp"
- Neural physics surrogate model: A learned differentiable model that approximates simulation outcomes to provide gradients for design/control optimization. "we leverage large-scale simulation to optimize the fingertip geometry using a differentiable neural-physics surrogate model."
- Objaverse: A large-scale dataset of 3D object models used for training and evaluation. "Our dataset includes 7k Objaverse~\cite{deitke2023objaverse} objects and 1k primitive shapes (spheres, boxes, cylinders) of various sizes."
- Parallel grippers: Two-finger grippers that move in parallel, commonly used for precise manipulation tasks. "two-finger parallel grippers are more widely adopted"
- Point cloud: A set of 3D points representing object geometry used for perception and policy inputs. "leverage large-scale simulation to learn dexterous grasping policies and employ point cloud observations for robust sim-to-real transfer."
- PointNet: A neural network architecture for processing point clouds directly without voxelization. "We then add a switcher consisting of PointNet~\cite{qi2017pointnet} and an MLP"
- Precision grasp: A grasp type where the thumb opposes fingertips to enable fine, accurate object manipulation. "the precision grasp is particularly associated with the fine-grained manipulation required for tool use in early humans"
- Proprioception: Internal sensing of the robot’s joint positions used as input to control policies. "with XArm-XHand joint position as proprioception information."
- Retargeting: Mapping human motion (e.g., teleoperator hand) to a robot’s kinematics for demonstration collection. "The standard position-based retargeting~\cite{qin2023anyteleop} struggles with fine-grained actions such as pinching a nut."
- Signed distance function (SDF): A scalar field that returns the signed distance from any point to a surface, used for generating pre-grasp motions. "is based on the object's signed distance function (SDF), which pushes fingers toward the object surface"
- Sim-to-real gap: Differences in sensing, calibration, and dynamics between simulation and the real world that impede direct deployment. "Deploying these grasps to the real world is impractical due to the sim-to-real gap."
- Sim-to-real transfer: Deploying policies learned in simulation directly in the real world. "which proves robust for sim-to-real transfer."
- Skew-symmetric matrix: A matrix representation used to encode cross products in grasp modeling. " is the skew-symmetric matrix of ."
- Teleoperation: Human-in-the-loop control of a robot from a distance to collect demonstrations or perform tasks. "Teleoperation is used to collect demonstrations."
- Wrench: A 6D vector of force and torque describing the effect of contact forces on an object. "which encourages the net wrench to approach zero for the thumb-index grasp."
- Zero-shot: Evaluation or deployment without task-specific fine-tuning on the target environment. "Our method achieves an 82.5\% zero-shot success rate on unseen objects in sim-to-real precision grasping"
Collections
Sign up for free to add this paper to one or more collections.

