Learning the Geometry of Data: A Mathematical Review of Shape Space Analysis
Abstract: A central objective of machine learning is to identify structure and patterns in data. Advances in data acquisition have increasingly produced datasets whose observations possess rich geometric form, giving rise to shape spaces that encode variability in object geometry. Such datasets arise across a wide range of disciplines, including biology, medicine, anthropology, and computer vision, where subtle geometric differences often carry important scientific information. Traditional machine learning methods, however, are frequently ill-equipped to account for the nonlinear geometric structure underlying these data. This survey synthesizes a rapidly growing body of work on shape space analysis, which provides a mathematical and computational framework for the study of geometric data. Drawing on ideas from differential geometry, statistics, and machine learning, we organize the literature around a common analytical pipeline: shape representation and parameterization, the rigorous construction of robust geodesic metrics, statistical analysis on shape spaces, and geometry-aware learning methods. We discuss how these tools enable the characterization of shape variability, the comparison of geometric objects, and the analysis of structural trajectories across populations and time. To illustrate the breadth of the field, we highlight applications spanning multiple scales of biological organization, including studies of subcellular morphology and primate tooth evolution. Across these and many other domains, researchers face common challenges arising from complex, nonlinear, and often unaligned geometric variation. The review concludes by identifying key theoretical and computational challenges, as well as emerging opportunities driven by increasingly large and diverse geometric datasets.

Paper Prompts
Sign up for free to create and run prompts on this paper using GPT-5.
Top Community Prompts
Explain it Like I'm 14
What this paper is about (in simple terms)
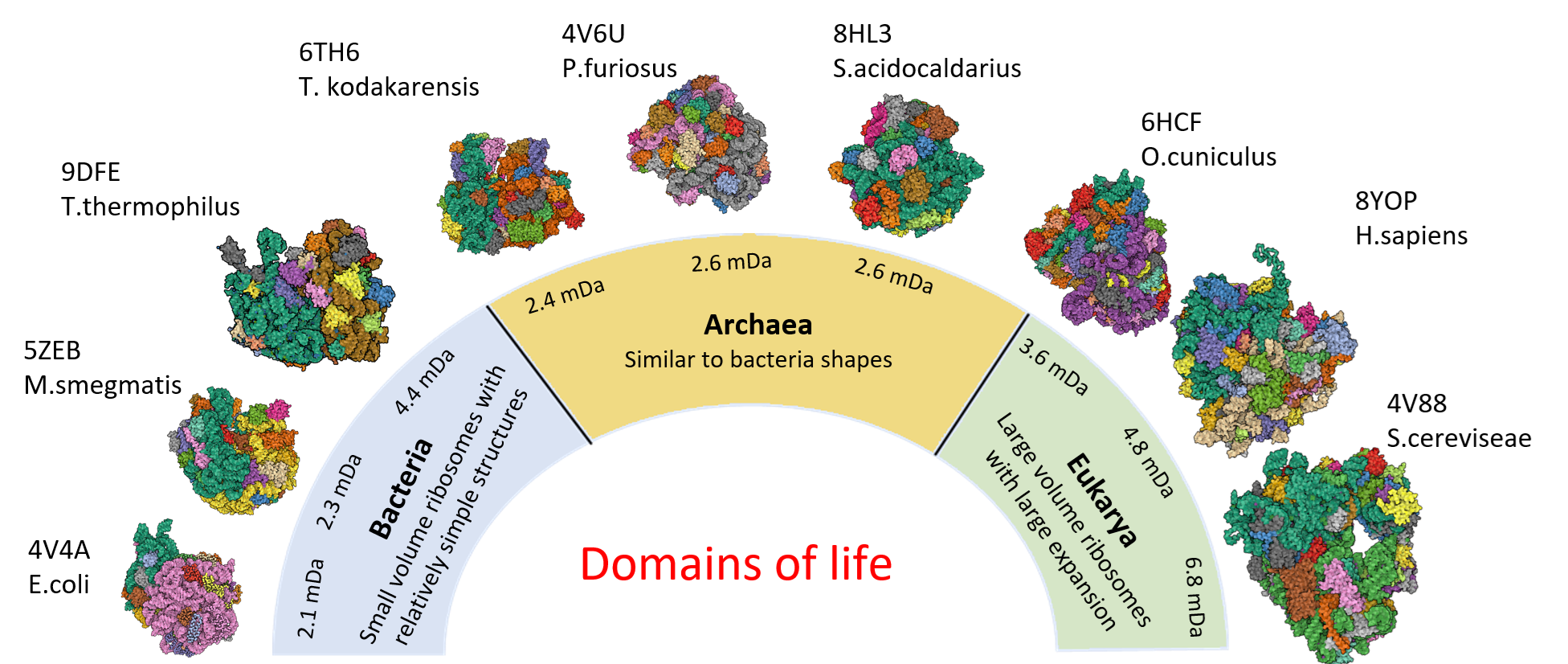
This paper is a friendly tour of a big idea: lots of modern data isn’t just numbers in a table—it has shape. Think of ribosomes, brain scans, teeth, cells, faces, or human poses. The authors explain how to study collections of shapes using math and computers so we can spot small but meaningful differences, find patterns, and make good comparisons. They call the “world” where shapes live a shape space, like a map where each dot is one shape and distances show how different two shapes are.
What questions does the paper try to answer?
- How do we represent shapes on a computer so that we can compare them fairly?
- How do we line up (align) shapes so we’re comparing “nose to nose” or “edge to edge,” not apples to oranges?
- What is a good way to measure how different two shapes are, even if they’re rotated, moved, or scaled?
- How can we find simple patterns in a messy collection of shapes (for example, “most differences happen along this main direction”)?
- How can we do all this when we have very few labeled examples, which is common in biology and archaeology?
How the paper approaches the problem
The paper is a review, so it organizes a toolkit and a step‑by‑step way of thinking rather than presenting one new algorithm. Here’s the roadmap, explained with everyday language.
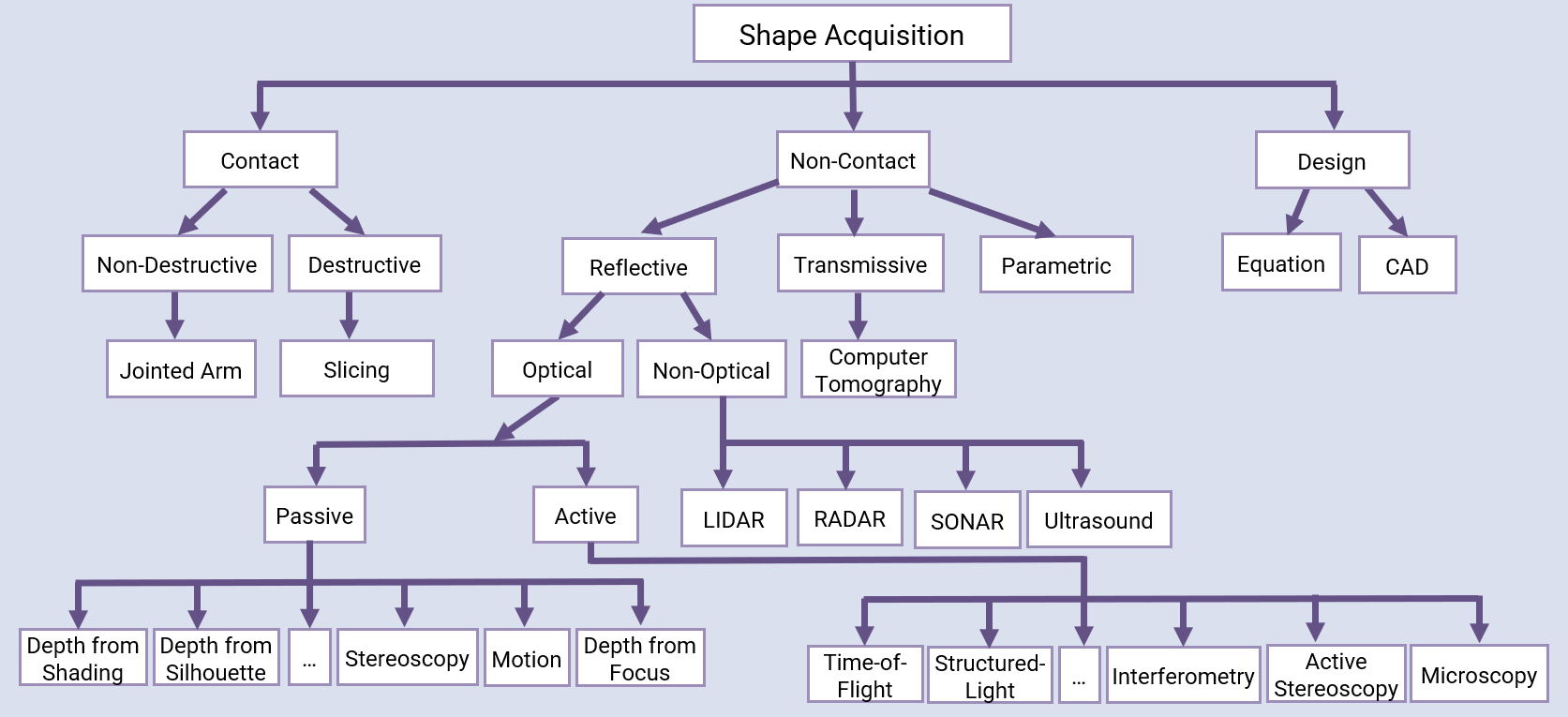
- Getting shapes into the computer: Cameras, scanners, microscopes, and medical machines (like MRI or CT) capture objects. These become digital data in formats such as pictures, 3D point clouds (lots of dots on a surface), or meshes (dots connected into a net).
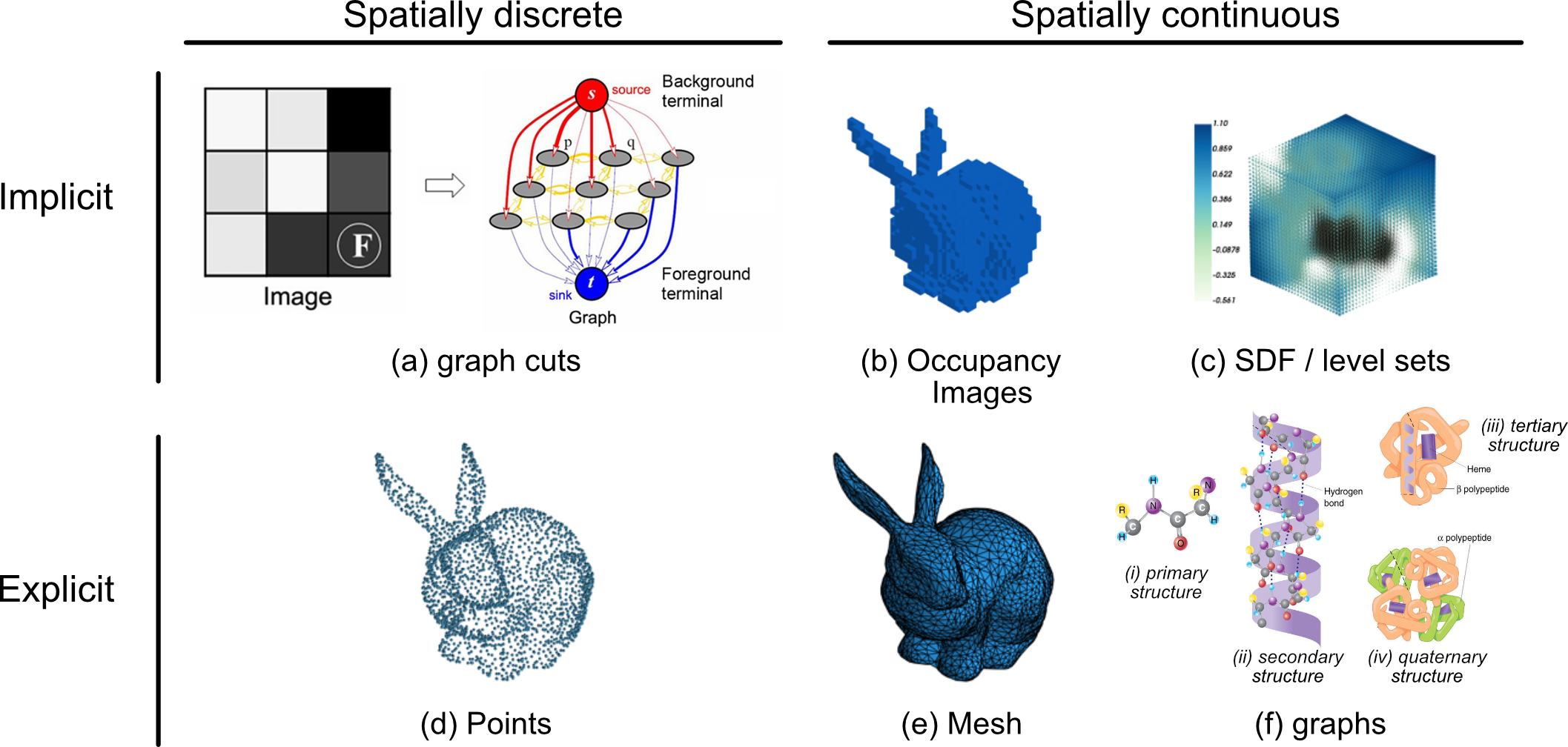
- Two ways to store a shape: 1) Implicit: color the inside of the object (like a filled‑in silhouette). This is easy for many shapes and dimensions. 2) Explicit: record the boundary as dots (point cloud) or a net (mesh). This makes it easier to match parts and measure details on the surface.
- Converting formats: You can turn a filled‑in silhouette into a mesh (and back) when different steps need different formats.
- Aligning shapes (registration and landmarking): Before comparing two faces, you line up the eyes, nose, and mouth. Landmarks are those “key points.” Registration is the algorithm that does the lining up.
- Parameterization (making coordinates on a shape): This is like drawing a neat grid on a banana peel without tearing it, or unwrapping an orange peel onto a flat map. It gives each location on the shape a consistent “address,” which makes comparisons much easier.
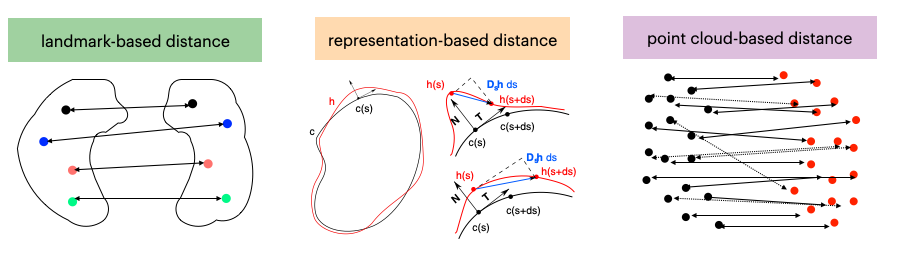
- Distance metrics (how far apart are these two shapes?): A metric is a rule for measuring difference. Good metrics ignore rotation, position, and size (so “same shape, different pose” doesn’t look far apart) but do catch subtle, meaningful changes.
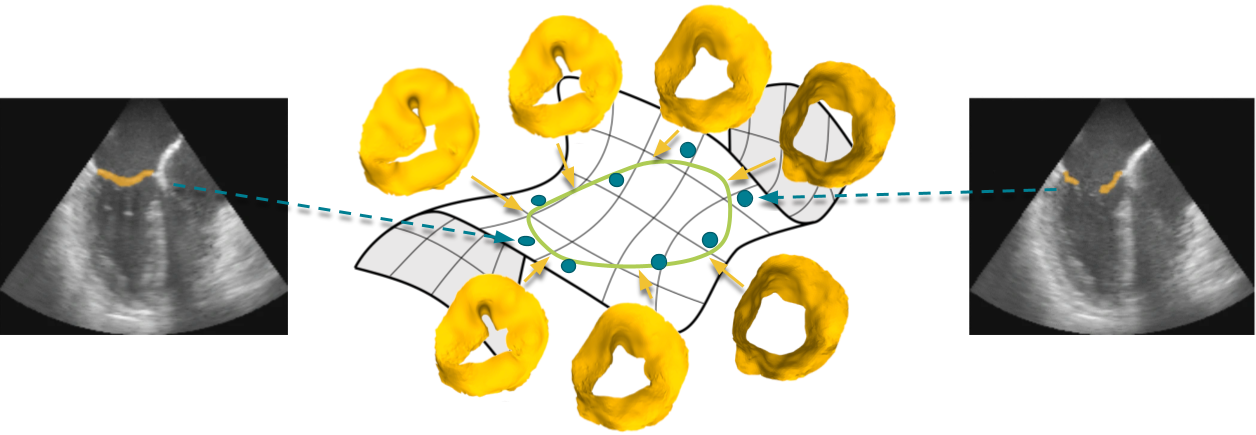
- Learning the shape space (manifold learning): Imagine all your shapes lie along a windy road in high‑dimensional space. Manifold learning tries to find that road—a simpler, lower‑dimensional map—so we can see patterns, trends, and “paths of change” over time.
- Statistics on shapes: We still want averages and variation, but for shapes. The paper reviews how to define a “mean shape,” how to measure spread, and how to test if groups differ, even when the data live on curved spaces (not flat grids of numbers).
- Machine learning with geometry: When labeled examples are scarce (common in science), geometry‑aware methods often beat generic neural nets. The paper shows how classical math plus careful shape features can be stronger than brute‑force learning.
What they found and why it matters
The authors compare many methods and share two case studies (cell shapes and primate teeth) to show how this works in practice. Their main messages:
- A unified language helps: Different fields (biology, anthropology, computer vision) use different terms for similar ideas. The paper ties these together so researchers can share tools and talk clearly.
- Geometry‑aware beats generic in low‑label settings: When labels are rare and differences are subtle, methods that respect shape structure usually perform better than “black box” models.
- Collections matter: Studying many related shapes at once reveals patterns you can’t see from a single example (for instance, typical ways a shape bends, grows, or varies).
- The metric and alignment are critical: Picking the right way to line up shapes and measure their difference can make or break the analysis.
- Representations have trade‑offs:
- Implicit (filled‑in) formats are flexible and scale well to higher dimensions and topology changes.
- Explicit (points/meshes/graphs) capture details and part‑to‑part matches but can be trickier to process.
- Switching between formats lets you use the best tool for each step.
- Common challenges across fields are really geometric: Whether it’s brain scans or ribosomes, people face the same core issues—unaligned samples, small differences, limited labels—so shared geometric tools help everyone.
What this could change
This review gives researchers a clear, practical playbook for shape data:
- In medicine: Compare organs, cells, or tumors more reliably, even with few labeled scans.
- In biology: Link tiny shape changes (like ribosome size and structure) to function.
- In anthropology and archaeology: Track how teeth or tools evolve and vary across groups.
- In graphics and robotics: Build better models of human pose, faces, and motion that respect real geometry.
It also points to open questions: How do we pick the “best” metric automatically? How do we handle shapes that split/merge or change topology? Can we align huge datasets with minimal human input? Answering these will make shape analysis faster, more accurate, and easier to use across many sciences.
In short, the paper shows that shapes are not just pictures—they’re structured objects. By learning the geometry of data, we can find hidden patterns, make stronger comparisons, and draw better conclusions, even when data are scarce.
Knowledge Gaps
Knowledge gaps, limitations, and open questions
Below is a consolidated list of concrete gaps and open questions the paper raises or leaves unresolved, framed to guide actionable future research.
- Representation selection: Lack of quantitative, task-driven criteria for choosing between implicit vs explicit representations (and their variants) given constraints on accuracy, memory, and scalability; need decision frameworks with measurable trade-offs.
- Conversion fidelity: No error/stability analysis for converting between representations (e.g., voxelization↔meshing↔point clouds↔SDFs); require bounds on geometric distortion, topology changes, and their impact on downstream metrics, registration, and statistics.
- Metric choice and validation: Absence of principled procedures to select or learn distance metrics that balance SE(3)/scale invariance with sensitivity to subtle, domain-meaningful variations; need standardized benchmarks comparing metrics across tasks and datasets.
- Automatic registration at scale: Robust, minimally supervised alignment and correspondence across large shape collections with subtle variations, partial data, and noise remains unresolved; efficient cross-topology registration is particularly underdeveloped.
- Topological variability: Parameterization-based tools require fixed topology; open problem of defining consistent correspondences and statistics across topological changes and segmentation artifacts without heavy manual intervention.
- Intrinsic dimensionality: Reliable estimation of the intrinsic dimension of shape manifolds under noise, small sample sizes, and nonuniform sampling; methods for scale selection and confidence intervals on dimension estimates are lacking.
- Dynamics and temporally invariant coordinates: Learning temporally invariant coordinates and causal/physically interpretable dynamics from irregularly sampled, noisy shape trajectories remains an open challenge.
- Statistical inference on manifolds: Need theory and algorithms for means, variances, CLTs, confidence regions, and hypothesis tests on curved/quotient shape spaces (including multimodal distributions and non-unique Fréchet means).
- Uncertainty propagation: Acquisition and segmentation uncertainties are not integrated into registration, metric learning, manifold learning, and statistical inference; require end-to-end uncertainty-aware pipelines.
- Feature descriptor robustness: Missing systematic comparisons of spectral/basis/learned descriptors for robustness to reparameterization, sampling density, mesh quality, and noise; need interpretable links between descriptor components and anatomical/functional semantics.
- Learning with limited labels: Insufficient self-supervised/contrastive pretext tasks tailored to shapes (images, point clouds, meshes, graphs) and limited evidence on cross-domain transfer under shape statistics mismatch.
- Benchmarking and evaluation: Lack of standardized, multi-domain datasets with ground-truth correspondences/distances/dynamics, unified evaluation protocols, baselines, and reproducibility checklists for end-to-end shape space pipelines.
- Scalability and streaming: Few algorithms support streaming/online updates of correspondences, embeddings, and statistics as new shapes arrive; need sub-quadratic registration and metric computation for large collections.
- Compute efficiency: No systematic study of GPU/TPU utilization, memory access patterns, and mixed-precision stability across representations; need optimization recipes for irregular structures (meshes/graphs) versus regular grids.
- Mesh quality and “polygon soup”: Automated, principled mesh repair with guarantees (e.g., preserving geometry/topology) is missing; unclear how repair choices bias downstream geometry-sensitive analyses.
- Multiscale/hierarchical modeling: Methods are immature for integrating hierarchical parts and hypergraphs (e.g., protein quaternary structure) with continuous geometric representations while preserving cross-scale semantics.
- Cross-dataset and cross-modality alignment: Open problem of aligning shape spaces across acquisition modalities, species, or labs while preserving biological/functional correspondences and avoiding domain shift artifacts.
- Parameterization domain selection: No automated selection of template domains (disk/sphere/cylinder) and cut strategies for complex shapes; need distortion quantification and guidelines for downstream effect on metrics and statistics.
- Geometry–field integration: Metrics and descriptors that jointly model geometry with attached fields/signals (e.g., textures, functional measurements) lack standard formulations and calibration of geometry-versus-field contributions.
- Explainability: Missing tools to map learned manifold coordinates or classifier decisions back to localized geometric changes (e.g., surface sensitivity maps) for trustworthy, domain-relevant interpretation.
- Partial and occluded shapes: Theoretical and algorithmic gaps for metrics and registration robust to partial observations/incomplete scans with performance guarantees.
- Sampling/resolution bias: Need quantification and mitigation strategies for biases induced by differing sampling densities, voxel sizes, anisotropy, and reconstruction pipelines across datasets.
- Higher-dimensional shapes: Limited methods for 4D spatiotemporal surfaces and ensembles (with uncertainty fields); data structures and numerics for high-dimensional shape analysis remain underexplored.
- Interoperability and provenance: Absent standardized APIs/file formats that connect acquisition, segmentation, representation conversion, registration, and analysis with provenance tracking and reproducible configurations.
- Terminology and ontology: While fragmentation is noted, a concrete, machine-readable ontology mapping cross-disciplinary terms and concepts is not provided; needed for consistent communication and tool interoperability.
- Geometry-aware vs standard models: Few controlled studies isolating the gains of geometry-aware learning under label scarcity; require ablation protocols to quantify when geometric priors yield consistent improvements.
- Riemannian computations at scale: Efficient, approximated geodesics and Fréchet means with error control on high-resolution shapes are not presented; need scalable algorithms with theoretical guarantees.
- Hybrid pipelines: Criteria and mechanisms for when and how to switch between implicit and explicit representations within a pipeline are not formalized; automated, performance-aware hybrid workflows are needed.
- Incorporating physical priors: Integration of physics-based constraints (e.g., elasticity, growth) with data-driven registration/metrics remains ad hoc; learning stiffness/regularization from data is an open avenue.
Practical Applications
Immediate Applications
Below are concrete, deployable use cases that can be implemented with current tools and data, drawing directly on the paper’s pipeline (acquisition → segmentation → representation conversion → registration/alignment → parameterization → metric selection → manifold/statistical analysis → downstream ML).
- Healthcare/Medical Imaging — Robust segmentation, registration, and statistical shape modeling for organs, bones, and lesions
- What: Build geometry-aware pipelines for 3D organ segmentation, atlas building, implant planning, and longitudinal monitoring (e.g., brain, heart, orthopedic structures).
- How: Combine U-Net/Cellpose for segmentation with explicit/implicit representations (occupancy images/SDFs), non-rigid registration, Laplace–Beltrami/Dirac spectral descriptors, Fréchet means/variances on manifolds, and diffusion maps/HDM for low-label learning.
- Tools/Workflows: ITK/VTK/SimpleITK, Scalismo, Open3D, Poisson surface reconstruction, graph cuts/level sets; metrics invariant to scale/rotation/translation; cohort-level morphometry dashboards.
- Dependencies/Assumptions: DICOM access and de-identification; consistent acquisition protocols; appropriate metric choice; regulatory validation for clinical deployment.
- Healthcare — Morphometric biomarkers and disease trajectory analysis
- What: Derive shape-based biomarkers (e.g., cortical thinning patterns, cardiac remodeling, tumor boundary roughness) and map patient trajectories in shape space for prognosis and patient stratification.
- How: Compute manifold coordinates of shapes over time; estimate geodesic trends and population Fréchet means; perform geometry-aware hypothesis testing.
- Tools/Workflows: Geometry-aware statistics on Riemannian manifolds, diffusion maps, permutation tests on manifolds.
- Dependencies/Assumptions: Sufficient cohort size; control of confounders (age/sex/scanner); robust alignment.
- Surgical planning, prosthetics, orthodontics — Custom device design from 3D scans
- What: Generate patient-specific implants, braces, and guides that respect local anatomical variability.
- How: Mesh repair, parameterization (spherical harmonics for closed surfaces; cylindrical/disk-like domains for open/tubular structures), non-rigid registration for correspondence, tolerance checks via SDF-based deviation maps.
- Tools/Workflows: MeshLab, TetGen, Poisson reconstruction, SDF-based fit evaluation, 3D printing and CAM integration.
- Dependencies/Assumptions: High-resolution scans; watertight meshes or reliable repair; device certification.
- Structural biology/Drug discovery — Cryo-EM model building and conformational state analysis
- What: Accelerate reconstruction and classification of macromolecular shapes (e.g., ribosome conformations, protein complexes), linking geometry to function.
- How: Use occupancy images for coarse shapes; fit graph-based protein models to densities with physical constraints; cluster/compare using geometry-aware metrics.
- Tools/Workflows: Level sets/SDFs, graph modeling of protein hierarchies, Laplacian/Dirac spectra, manifold clustering.
- Dependencies/Assumptions: Sufficient SNR and particle counts; compute resources; integration with existing Cryo-EM software.
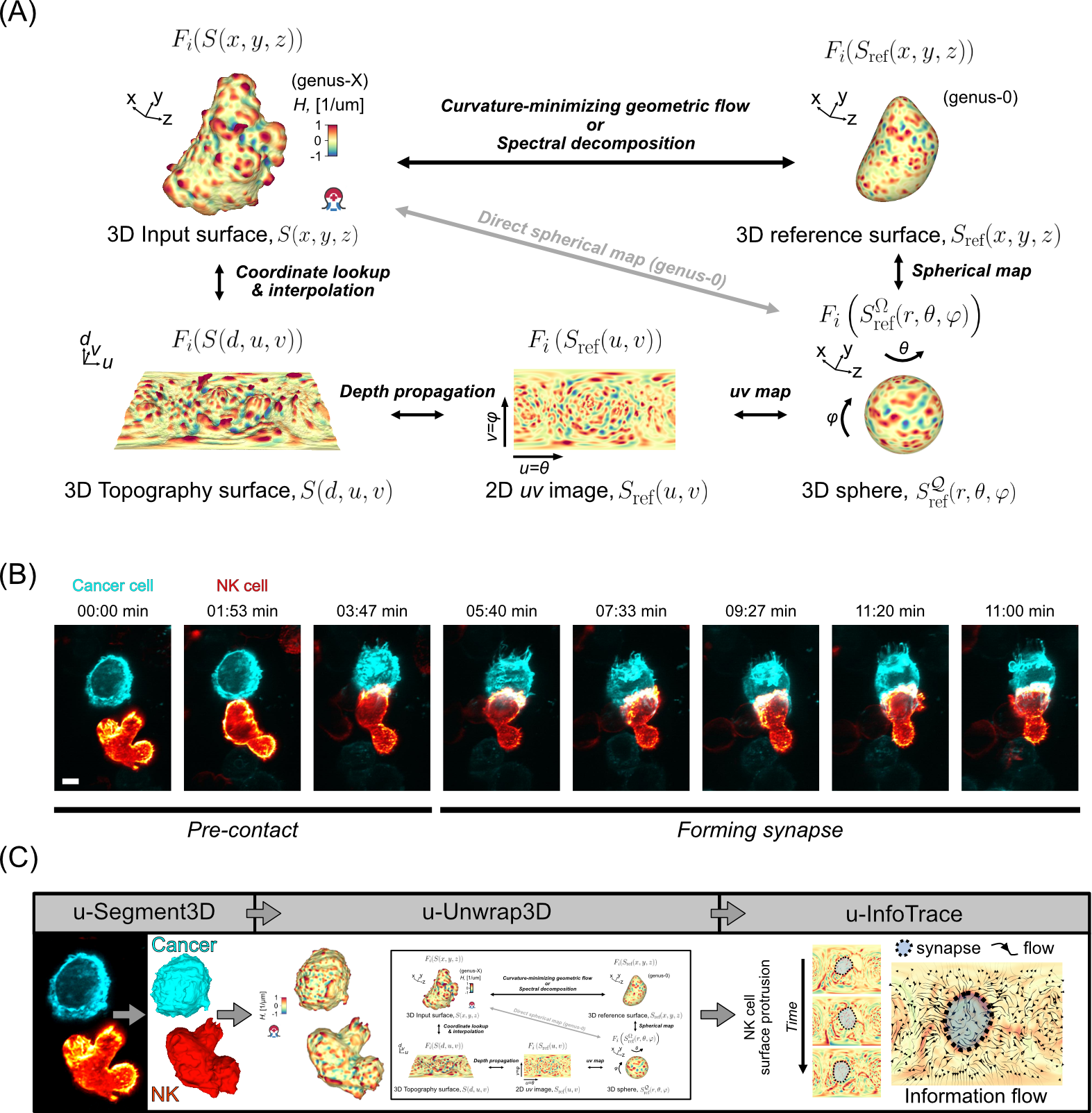
- Cell biology/microscopy — High-fidelity morphology quantification
- What: Quantify cell surface protrusions, organelle remodeling, and treatment effects at population scale.
- How: Cellpose/U-Net segmentation; surface meshing and repair; spectral descriptors; manifold learning for phenotype discovery with few labels.
- Tools/Workflows: Occupancy → mesh conversion, Laplace–Beltrami spectra, diffusion maps, geometry-aware denoising.
- Dependencies/Assumptions: Staining quality; consistent imaging; minimal topological artifacts or robust mesh repair.
- Advanced manufacturing and metrology — Deviation mapping and QC of parts
- What: Detect subtle shape deviations (warpage, tool wear) and enforce tolerances in production.
- How: Register CAD to scanned point clouds/surfaces; compute signed distance deviation heatmaps; flag shape outliers via manifold distances.
- Tools/Workflows: ICP + non-rigid registration, SDF deviation maps, tolerance analytics dashboards.
- Dependencies/Assumptions: Accurate calibration; scanning resolution; stable fixturing.
- Robotics and computer vision — Shape-aware perception and manipulation
- What: Improve object recognition, pose estimation, and grasp planning for deformable and articulated objects.
- How: Use spectral descriptors and learned graph/point features (PointNet/PointNet++, PyG/Jraph) with correspondence-aware registration; shape priors for SLAM.
- Tools/Workflows: Graph neural networks on meshes/point clouds, Laplace–Beltrami features, non-rigid matching.
- Dependencies/Assumptions: Real-time compute; robust sensor fusion; curated shape priors.
- AR/VR and consumer fit — Phone-based 3D scanning for personalization
- What: Enable custom-fit eyewear, footwear, orthotics, and apparel sizing; reduce returns by shape-matching products to users.
- How: SfM/photogrammetry to occupancy; mesh repair and parameterization; similarity search in product shape space; per-user tolerance checks.
- Tools/Workflows: Mobile scanning SDKs, SDF-based similarity, retrieval over geometry-aware embeddings.
- Dependencies/Assumptions: Camera calibration; lighting variation; privacy consent.
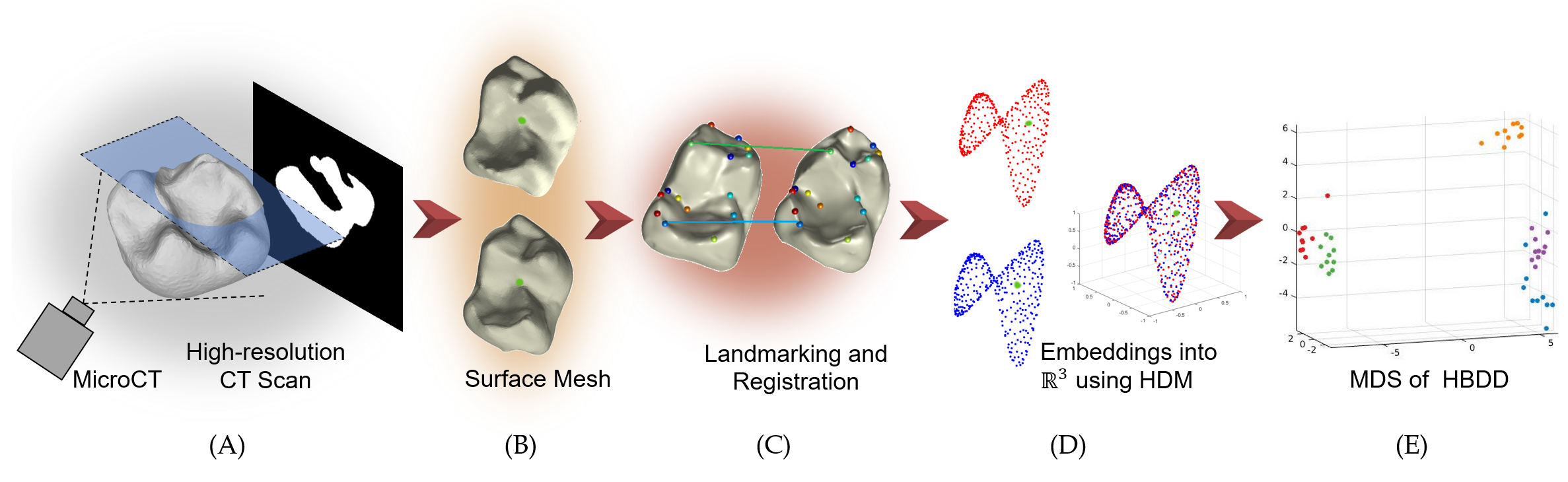
- Cultural heritage/archaeology/paleography — Shape-driven classification and restoration
- What: Classify artifacts, align fragments, and analyze letterform evolution with minimal labels.
- How: Landmarking, Procrustes/elastic shape matching, geometry-aware clustering/trajectories to infer lineages or workshops.
- Tools/Workflows: Landmark-based morphometrics, elastic metrics, manifold inference (diffusion maps).
- Dependencies/Assumptions: Digitization quality; cross-collection alignment; documentation standards.
- Energy/infrastructure — Inspection from LiDAR/ultrasound
- What: Monitor wind turbine blades, pipelines, and civil structures for deformation/fatigue via shape deviation analysis.
- How: Point cloud → mesh repair; non-rigid alignment to baselines; SDF deviation; manifold outlier detection.
- Tools/Workflows: Open3D, Poisson reconstruction, tolerance analytics, alerting pipelines.
- Dependencies/Assumptions: Access and safety; environmental noise; ground-truth baselines.
- Policy and regulation — Standards and validation for geometry-aware AI
- What: Define evaluation protocols for shape-centric medical AI, biometric fairness audits, and reproducible morphometric studies.
- How: Establish metric/representation reporting standards, manifold-aware statistical tests, and certified pipelines.
- Tools/Workflows: Checklists for metric invariances, registered benchmark datasets, reproducibility packages.
- Dependencies/Assumptions: Consensus across societies; access to public datasets; governance for sensitive data.
- Academia and education — Reproducible, cross-disciplinary shape analysis
- What: Adopt unified terminology, curated datasets, and teaching modules spanning math/stat/CS/biomed.
- How: Reference the survey’s taxonomy; share code notebooks demonstrating representation conversion, metric choices, and manifold learning.
- Tools/Workflows: PyG/Jraph, Open3D, Scalismo, diffusion maps/HDM toolkits, R geomorph.
- Dependencies/Assumptions: Data licensing; maintenance of open-source tools; instructor expertise.
Long-Term Applications
These applications are promising but require further research, larger datasets, standardization, or scalable infrastructure before broad deployment.
- Shape-aware foundation models and cross-domain pretraining
- What: General-purpose models pre-trained on multi-sector shape data (medical, manufacturing, robotics, biology) with geometry-aware objectives.
- Potential products: “Geometry-AI SDKs,” cross-modal shape–text models for semantic search over 3D repositories.
- Dependencies: Massive, diverse shape corpora; unified ontologies; efficient training on irregular data (meshes/graphs).
- Digital twins of organs, tissues, and cells with predictive dynamics
- What: Personalized simulators that forecast disease or treatment response as trajectories on shape manifolds.
- Potential products: Clinical decision support tools integrating shape dynamics with EHR and physiology.
- Dependencies: Longitudinal, multi-modal datasets; validated dynamical models; regulatory pathways.
- Genotype–phenotype mapping via multi-scale shape spaces
- What: Link genetic/epigenetic variation to morphological manifolds from subcellular to organismal scales.
- Potential products: Target discovery platforms using shape as an intermediate phenotype.
- Dependencies: Joint omics-imaging cohorts; causal inference frameworks; standardized shape metrics across scales.
- Autonomous labs guided by geometry-aware discovery
- What: Closed-loop experimentation where shape-space uncertainty and gradients prioritize new measurements.
- Potential products: Active-learning microscopes and Cryo-EM data collection planners.
- Dependencies: Real-time manifold inference; robust acquisition–analysis integration; lab automation.
- Real-time, on-device geometry-aware perception for AR/VR and surgical robots
- What: Edge inference of shape manifolds for guidance, registration, and safety-critical decisions.
- Potential products: AR surgical overlays, robotic suturing with deformable tissue models.
- Dependencies: Specialized hardware; certifiable latency/accuracy; fail-safe designs.
- Evolutionary forecasting in anthropology and biology
- What: Predict shape evolution trajectories (e.g., dental morphology, wing shapes) under environmental pressures.
- Potential products: Educational and research platforms; conservation planning tools.
- Dependencies: Large, curated historical shape datasets; robust temporal alignment; uncertainty quantification.
- Soft robotics and morphological co-design using shape manifolds
- What: Optimize robot bodies and controllers jointly in learned shape spaces.
- Potential products: Task-specific soft manipulators; adaptive wearables.
- Dependencies: Differentiable simulators; fabrication constraints; sim-to-real transfer.
- Urban morphometrics and climate resilience planning
- What: Analyze city/block/building “shape spaces” to optimize airflow, shade, and flood resilience.
- Potential products: Planning decision-support suites with geometry-aware KPIs.
- Dependencies: High-resolution geospatial data; cross-agency standards; socio-economic fairness guardrails.
- Generative design and certification for additive manufacturing
- What: Geometry-aware generative models producing certifiable parts within tolerance and fatigue constraints.
- Potential products: “Design-to-print” platforms with verifiable shape/manifold constraints.
- Dependencies: Verified physics constraints; audit trails; industry standards for AI-generated geometry.
- Privacy-preserving, federated geometric learning
- What: Collaborative model training on shape data across institutions without sharing raw meshes/scans.
- Potential products: Federated shape analytics for hospitals and manufacturers.
- Dependencies: Secure aggregation tailored to manifold data; harmonized metrics; governance frameworks.
Notes on Assumptions and Dependencies (cross-cutting)
- Data quality and representation: Accurate segmentation and repair (watertight meshes, valid SDFs) are often prerequisites; topology mismatches can degrade results.
- Metric choice matters: Invariance (scale/rotation/translation) and sensitivity to subtle, local variations must match the domain; report and justify metric decisions.
- Limited labels: Leverage geometry-aware unsupervised/semi-supervised learning (diffusion maps/HDM, spectral descriptors) when labels are scarce.
- Compute and efficiency: Irregular data structures (meshes/graphs) may require specialized libraries (PyG/Jraph) and careful batching; edge deployment needs optimization.
- Standards and reproducibility: Adoption depends on common terminology, benchmark datasets, and validated, end-to-end pipelines (as emphasized in the survey).
- Ethics and governance: Medical/biometric and cultural heritage applications require privacy, consent, and fairness considerations aligned with policy and regulation.
Glossary
- adjacency graph: A graph whose nodes represent pixels (or voxels) and edges encode neighborhood relationships for modeling image connectivity. "the adjacency graph representation of an image"
- arc-length parameterization: A way of parameterizing a curve by its cumulative length from a starting point. "The arc-length parameterization of curves does not extend to parameterize surfaces."
- bijective maps: One-to-one and onto mappings used to parameterize shapes without overlap or gaps. "function space of bijective maps from a template domain into Euclidean space"
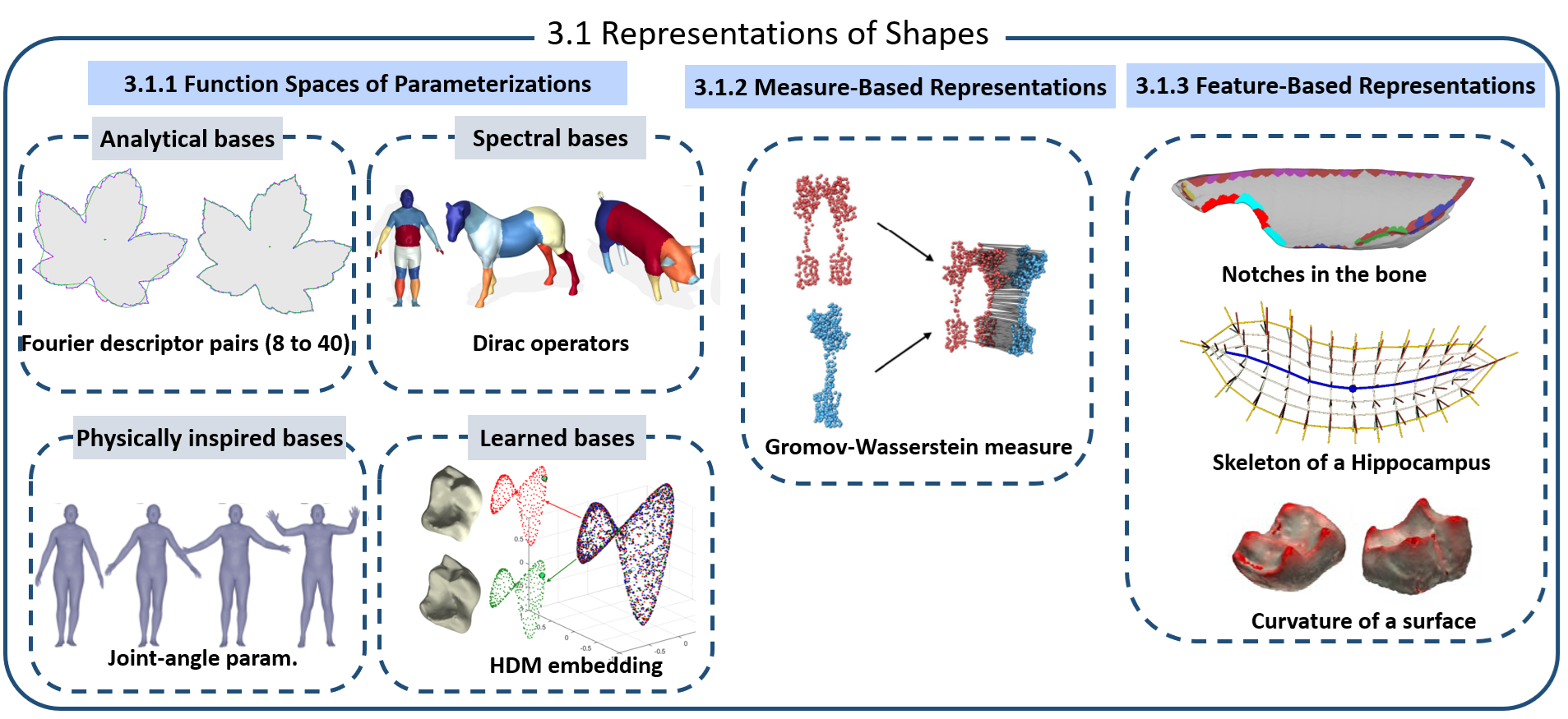
- Diffusion maps: A manifold learning technique that builds diffusion processes on data graphs to produce low-dimensional embeddings preserving geometry. "Learned bases obtained from PCA, NMF, Diffusion maps, HDM, sparse coding, or deep generative models"
- Dirac operators: Differential operators from geometry/physics whose spectra can be used to define shape descriptors. "Spectral bases derived from Laplace--Beltrami or Dirac operators"
- epipolar geometry: The geometric relationship between two camera views used for 3D reconstruction from images. "using triangulation and epipolar geometry."
- equivalence class: A set of objects considered identical under a specified family of transformations. "Mathematically, this motivates treating shape as an equivalence class under an appropriate family of transformations."
- Fourier modes: Basis functions (sines and cosines) used to represent signals or shapes in the frequency domain. "Analytical bases such as Fourier modes or spherical harmonics (e.g.~\cite{Burger2013}),"
- Function Spaces of Parameterizations: A representation family where shapes are modeled as functions mapping a template domain into Euclidean space. "Function Spaces of Parameterizations, where shapes are represented by maps from a template manifold into Euclidean space"
- geometric morphometrics: A statistical framework for analyzing shape variation, often using landmarks. "review geometric morphometrics with an emphasis on landmark-based approaches."
- graph cuts: An energy-minimization framework using cuts on a graph to segment images or partition data. "Graph cut formulation of an image, connecting pixels to graph nodes with edges representing the strength of affinity or dissimilarity."
- hypergraphs: Generalized graphs where edges (hyperedges) can connect more than two nodes, useful for modeling higher-order relationships. "the higher-order shapes require specifying hypergraphs, involving simplicial and cell complexes"
- Interferometry: An optical measurement technique using interference patterns to infer shape with high precision. "Interferometry projects a series of fringes such as Moire's to estimate shapes"
- isosurface meshing: Constructing a mesh from points in a volumetric field that share a common value (isosurface). "Isosurface meshing"
- k-nearest neighbors graph: A graph connecting each point to its k closest neighbors to capture local structure. "such as a k-nearest neighbors graph"
- Laplace–Beltrami operator: The canonical Laplacian on manifolds used to derive spectral shape descriptors. "Spectral bases derived from Laplace--Beltrami or Dirac operators"
- Laplacian smoothing: A mesh processing technique that smooths geometry by averaging vertex positions with neighbors. "such as Laplacian smoothing."
- landmarking: The process of placing corresponding points on shapes to enable alignment and comparison. "preprocessing, alignment, landmarking, and registration"
- level sets: Implicit surface representations using a scalar field whose zero-level defines the shape boundary. "also termed level sets"
- Light Detection And Ranging (LIDAR): An active depth-sensing method estimating distances by measuring light travel time. "Light Detection And Ranging (LIDAR)"
- manifold learning: Techniques for learning low-dimensional structures (manifolds) underlying high-dimensional data. "Through the lens of manifold learning approaches, we illuminate dynamic trajectories"
- Markov clustering: A graph-based clustering method using random walks/flow to identify communities. "labelspreading, diffusion, Markov clustering"
- non-manifold edges: Mesh edges whose connectivity violates manifoldness, causing processing issues. "fixing non-manifold edges and hole patching"
- occupancy images: Gridded fields whose values indicate the likelihood that points belong to the interior of a shape. "In the spatially continuous setting, a common representation is occupancy images."
- parameterization: Assigning coordinates to points on a shape to enable consistent indexing and comparison. "The analytical pipeline begins with optimal shape parameterization"
- polygon soups: Collections of polygons without consistent connectivity or manifold structure. "Meshes that do not have these properties are referred to as ``polygon soups''."
- quotient-space framework: Modeling shapes by identifying representations equivalent under a transformation group, forming a quotient space. "the quotient-space framework introduced below provides an abstract characterization of shape"
- radial basis function (RBF) kernels: Functions of distance used to measure similarity between points, often in segmentation or interpolation. "the edges encode similarities between pixel pairs based on their statistics, e.g., in terms of radial basis function (RBF) kernels."
- registration: Aligning shapes (or images) into a common coordinate frame to enable comparison. "robust registration across the dataset becomes a critical step."
- Riemannian manifolds: Smooth manifolds equipped with an inner product on tangent spaces, enabling geometric statistics. "an extended treatment of general Riemannian manifolds."
- shrinkwrapping: A mesh repair technique that wraps a surface around a target to create a clean, watertight mesh. "or shrinkwrapping \cite{portaneri2022alpha,zhou2023surface}."
- signed distance function (SDF): A scalar field whose value at a point is the signed distance to a shape boundary. "signed distance function (SDF), also termed level sets, with respect to the boundary"
- simplicial and cell complexes: Combinatorial structures (triangles, tetrahedra, cells) capturing higher-order relationships in data. "involving simplicial and cell complexes"
- spherical harmonics: Orthogonal basis functions on the sphere used for compact shape/surface representations. "Fourier modes or spherical harmonics"
- stereophotogrammetry: Reconstructing 3D shapes from multiple images by triangulation of corresponding features. "Stereophotogrammetry looks for homogeneous features from multiple cameras to reconstruct a 3D shape, using triangulation and epipolar geometry."
- Structure from motion (SfM): Recovering 3D structure and camera motion from multiple overlapping views. "Structure from motion (SfM) additionally recovers the camera motion around the object given multiple overlapping viewpoints."
- template manifold: A canonical domain from which shapes are parameterized via mappings into Euclidean space. "maps from a template manifold into Euclidean space"
- time-of-flight: Measuring distance by timing how long emitted energy (light, sound) takes to return to the sensor. "Time-of-flight systems use the Light Detection And Ranging (LIDAR) principle to estimate depth"
- triangulation: Inferring 3D positions by intersecting rays from multiple viewpoints; also, building meshes from points. "using triangulation and epipolar geometry."
- voxelization: Converting geometric objects into volumetric grids of voxels for processing or analysis. "Voxelization"
- watertight: A mesh property indicating a closed surface without holes or gaps, necessary for many algorithms. "they should have properties of a surface or volume, namely, be single-component, manifold, and watertight."
Collections
Sign up for free to add this paper to one or more collections.