UniSHARP: Universal Sharp Monocular View Synthesis
Abstract: In this work, we focus on extending SHARP, the popular photorealistic view synthesis method, for universal monocular rendering across a continuum of camera systems, from conventional perspective cameras to wide-field-of-view, fisheye and omnidirectional panoramic settings. To overcome the pinhole-specific assumptions of SHARP, our key idea is to align various images in a unified omnidirectional latent space. Thus, we propose UniSHARP, which performs implicit alignment in both feature and Gaussian spaces. Specifically, Gaussian primitives are arranged along rays and radial distances in a ray-based universal representation, while 2D semantic and 3D spatial features extracted from UniK3D-inspired encoders are jointly decoded to generate the complete Gaussian cloud. To comprehensively evaluate our method, we construct a benchmark covering diverse imaging systems across various scenes. The benchmark is further stratified by field of view (FoV) to enable fine-grained assessment of the universal monocular rendering task. Extensive experiments on the proposed benchmark demonstrate the effectiveness of UniSHARP, outperforming alternative methods by a large margin. The project page can be found at: https://insta360-research-team.github.io/Unisharp-website/



Paper Prompts
Sign up for free to create and run prompts on this paper using GPT-5.
Top Community Prompts
Explain it Like I'm 14
What Is This Paper About?
This paper introduces UniSHARP, a computer vision method that can take just one picture and create new, realistic views of the same scene from different angles. What makes it special is that it works with many kinds of cameras—not just regular phone cameras, but also wide-angle, fisheye, and full 360-degree panoramic cameras.
What Questions Does It Try to Answer?
- Can we make a single system that takes one photo and generates new views for any camera type (regular, wide, fisheye, or 360°)?
- How do we avoid “bending the rules” for each camera type and instead use one shared way to understand all images?
- If the camera’s settings are unknown (no calibration), can the system still figure out the scene and render new views?
How Does It Work? (In Simple Terms)
Think of building a 3D scene out of tiny, soft, see-through balls that glow with color—these are called “3D Gaussians.” When you look at the scene from a new angle, the system “splatters” these balls onto the screen to form an image. UniSHARP improves how we place and adjust these balls so it works across many camera types.
Here are the key ideas:
- One shared map of directions (rays):
- Different cameras bend space differently. A small step in a regular photo can mean a big angle change in a fisheye or a panorama.
- To fix this, UniSHARP doesn’t work in flat image pixels. Instead, it uses rays—imagine millions of thin flashlight beams shooting out from the camera in all directions—and distances along those rays. This “ray-distance space” works the same for any camera.
- Two-layer 3D “blobs” for details:
- The system first drops a layer of Gaussians (the soft balls) where it thinks the visible surfaces are.
- Then it adds a second layer to capture hidden or tricky parts (like edges, thin objects, or areas that appear when the view changes). This helps with sharpness and fewer holes when you move the camera.
- Smarter features, not just pixels and depth:
- UniSHARP blends two kinds of clues:
- 2D “what is this” clues (semantic features) from the image, and
- 3D “where is this” clues (geometry features) from the rays and distances.
- It uses these clues to gently nudge each Gaussian (its position, size, color, and orientation) so the final scene looks sharp and realistic.
- Trained on many camera types at once:
- Instead of building a special version for each camera, they train one model on a mix of regular, wide-FoV, fisheye, and panorama images. This teaches the system to handle all of them.
- Panorama-specific tweaks:
- 360° images stretch areas near the top and bottom. UniSHARP uses a simple dropout rule during training to avoid placing too many Gaussians where the image is overly stretched, which stabilizes learning.
- Works even without camera settings (pose-free):
- If you don’t know the camera’s exact setup, the model guesses the type and its viewing directions from the image’s rays, then proceeds normally. So you can feed it a single photo “as is.”
What Did They Find?
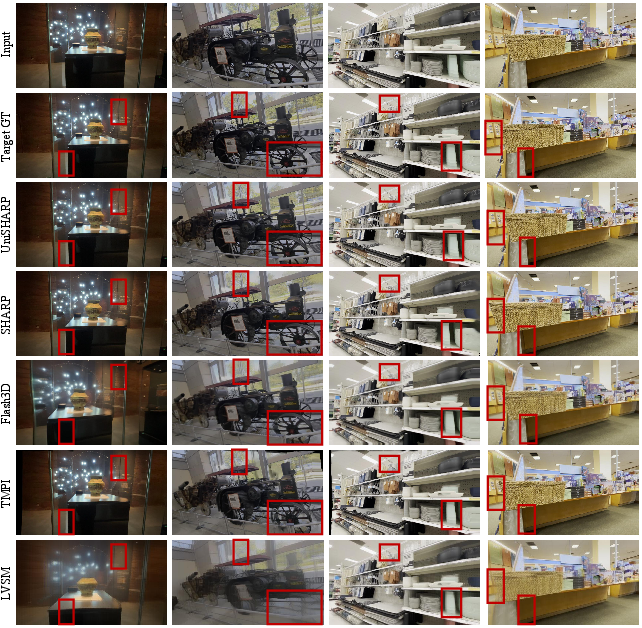
- It makes sharper, cleaner novel views from a single image across all camera types:
- Regular photos (like those in real-estate or everyday scenes) look crisp with fewer artifacts than earlier methods.
- Wide-angle and fisheye images are handled well, avoiding the usual distortions and blur.
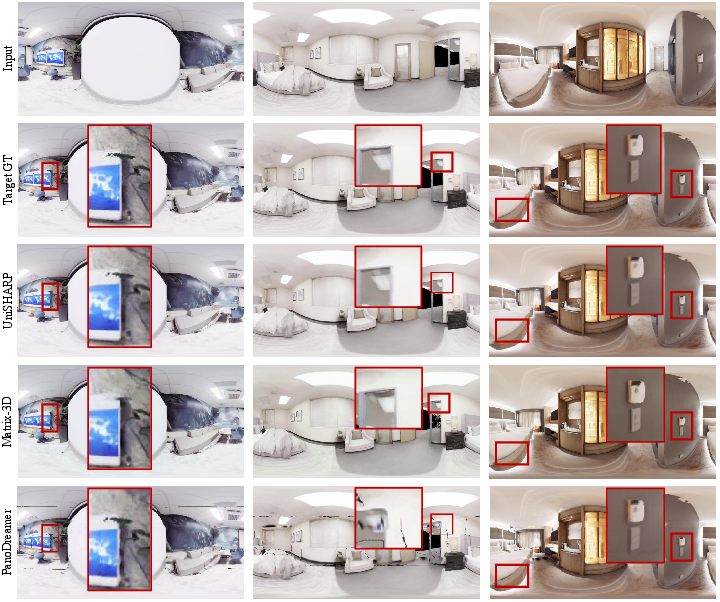
- 360° panoramas look especially improved, with sharper details and fewer oddities near the poles.
- It generalizes better:
- Even on new datasets it wasn’t trained on, UniSHARP still performs strongly, showing it learned a universal way to understand cameras.
- It works without camera calibration:
- The “pose-free” version (no known camera settings) still produces high-quality results, which is practical for photos found online or taken by unknown devices.
- New benchmark:
- They built a fair test that covers many camera types and fields of view (from about 60° up to 360°). UniSHARP consistently comes out on top or among the best on these tests.
Why this matters: Compared with earlier systems like SHARP (which focused on regular cameras) or panoramic-only methods, UniSHARP gives you one tool that works practically everywhere—and usually better.
Why Is This Important?
- One model for many cameras:
- Developers don’t need separate systems for phone cameras, action cams, or 360° cameras. That simplifies apps and reduces engineering time.
- Better AR/VR, robotics, and 3D content:
- Sharper, more reliable new views from a single picture means more convincing AR overlays, safer robot navigation, and faster 3D scene previews.
- Works “in the wild”:
- Even when camera details are missing, UniSHARP can still render good new views. That’s useful for user photos and social media images.
The Takeaway
UniSHARP turns a single photo into new, realistic viewpoints across many camera types by switching from pixel-based thinking to ray-and-distance thinking, and by carefully placing and refining tiny 3D “glow balls” (Gaussians). It’s sharper, more universal, and more practical than past approaches—pushing single-image 3D view synthesis closer to real-world use across phones, action cams, and 360° cameras.
Knowledge Gaps
Knowledge gaps, limitations, and open questions
Below is a single, consolidated list of what remains missing, uncertain, or unexplored in the paper. Each item is phrased to be concrete and actionable for future research.
- Runtime and memory profiling across camera types is missing; report inference time, Gaussian count, memory footprint, and throughput for perspective, wide-FoV, fisheye, and panoramas on standardized hardware.
- The renderer’s support for generic camera models is under-specified; detail and evaluate the exact rasterization pipeline for fisheye/panoramic ERP (e.g., vs. perspective rasterizers or generic-camera 3DGS variants), including numerical stability and aliasing.
- Pose-free calibration is only evaluated on a perspective dataset (WildRGB-D); extend to fisheye and panoramic inputs and quantify intrinsics-fitting error, camera-type misclassification rates, and the impact on rendering quality.
- Sensitivity to errors in the predicted ray field and pseudo-depth is not analyzed; perform controlled noise injections and ablate UniK3D prediction quality to measure robustness of Gaussian initialization and final render fidelity.
- The reliance on UniK3D for ray/depth features is fixed; compare frozen vs. fine-tuned vs. end-to-end training of the ray predictor and assess domain mismatch across camera families.
- The two-layer Gaussian design is static; evaluate adaptive per-pixel/per-region layer count (e.g., learned gating) and the trade-off between disocclusion handling, artifacts, and compute.
- Panoramic distortion adaptation via latitude-dependent dropout is heuristic; benchmark against equal-area resampling, spherical kernels, or area-aware losses and quantify pole-region reconstruction and disocclusion quality.
- “Spherical Gaussian initialization” is mentioned but not detailed; provide the algorithm (parameterization, sampling, constraints) and ablate its contribution separately from dropout.
- View-dependent appearance modeling is unclear (e.g., SH coefficients vs. RGB only); quantify performance on specular/reflective materials and evaluate adding per-Gaussian SH or neural appearance models.
- Geometry accuracy is not directly measured; report depth/geometry metrics (e.g., AbsRel, RMSE, EPE) and edge alignment scores on datasets with ground-truth or reliable pseudo-depth.
- Target-view motion is restricted (>60% overlap, <0.5 m); systematically evaluate performance with larger baselines and lower overlap to establish the operational envelope of monocular extrapolation.
- Wide-FoV validation is simulated (OmniRooms-Wide projected); include real wide-FoV datasets and analyze domain gap between simulated and real optics (vignetting, PSF, noise).
- Fisheye model variety is not addressed; test multiple lens models (equidistant, equisolid-angle, stereographic, orthographic) and assess whether ray-distance parameterization and pose-free fitting generalize.
- Robustness to scene dynamics is untested; evaluate moving objects, motion blur, rolling shutter, and exposure changes, and quantify failure modes and potential temporal regularization strategies.
- Cross-camera interference during mixed training is not analyzed; vary dataset sampling weights, perform per-camera catastrophic-forgetting checks, and consider adapters or conditional normalization to mitigate conflicts.
- Baseline coverage is incomplete for non-perspective cameras; compare against strong feedforward omnidirectional/fisheye Gaussian methods (e.g., OmniGS, OmniSplat) and re-projection baselines (cube-map or Yin–Yang grids) to validate the claimed advantages.
- Uncertainty estimation and confidence maps for rendered views are absent; integrate uncertainty over rays/gaussians (e.g., MC dropout or evidential losses) and evaluate correlation with error.
- Failure cases and qualitative error taxonomy are not provided; document typical artifacts (floaters, ghosting, pole distortion, color bleeding) and link them to model components (layers, regularizers, feature fusion).
- Hyperparameter sensitivity is unreported; release or systematically vary loss weights (λ’s), dropout schedules, layer opacities, and grid resolutions to quantify stability and reproducibility.
- Scalability with input resolution and angular coverage is not studied; measure how performance and compute scale when allocating Gaussians at native resolution for high-res panoramas or ultra-wide images.
- Outdoor panoramas and diverse scene types are underrepresented; add outdoor 360 datasets and analyze generalization across lighting, scale, clutter, and texture diversity.
- Joint optimization of camera type, intrinsics, and scene under pose-free settings is unexplored; investigate differentiable camera models integrated into training to reduce reliance on post-hoc fitting.
- Evaluation beyond PSNR/SSIM/LPIPS is limited; include perceptual user studies, task-driven metrics (e.g., downstream navigation/localization), and temporal consistency for sequences of novel views.
Practical Applications
Immediate Applications
Below are actionable use cases that can be deployed now, leveraging UniSHARP’s ray-distance universal representation, mixed-camera training, pose-free camera recovery, and 3D Gaussian Splatting pipeline.
- Bold parallax from a single 360° photo for VR tours [Sectors: real estate, tourism, media/entertainment]
- What: Turn a single equirectangular panorama into short 3DoF+ “look-around” clips or orbit paths with realistic parallax for web/VR tours.
- Potential tools/products/workflows: Unity/Unreal ingestion of an ERP image to produce a Gaussian scene and render small viewpoint trajectories; a web SDK or plugin for tour platforms (e.g., Matterport alternatives); Insta360 Studio or mobile companion app “Look Around” export.
- Assumptions/dependencies: Best for modest camera motions with high scene overlap (≤0.5 m baseline in the paper’s benchmark); static scenes; GPU or cloud inference; input panoramas ideally free of stitching artifacts (or use UniSHARP’s distortion-aware training).
- Look-around photos and videos from action/fisheye/wide-FoV cameras [Sectors: consumer imaging, social apps]
- What: Generate subtle view shifts, push-ins, or handheld-style motion from a single fisheye or ultra-wide frame while preserving scene structure.
- Potential tools/products/workflows: Mobile app feature that converts a single frame to a short parallax video; on-camera companion software for wide-FoV and fisheye action cams; social media “3D photo” generator.
- Assumptions/dependencies: On-device acceleration desirable but not required (server-side feasible); pose-free mode can infer intrinsics, but quality improves with known calibration; moving objects may cause artifacts.
- Quick previz from a single 360° still [Sectors: film/VFX, advertising]
- What: Pre-visualize pans, dollies, and lens options from a single location-scouting panorama.
- Potential tools/products/workflows: DCC plugin (e.g., Nuke/After Effects/Blender) that imports a single ERP and exports multi-angle plates; Unreal engine blueprint for “virtual dolly” from one pano.
- Assumptions/dependencies: Limited motion realism; not ground-truth geometry; works best in static, well-lit scenes.
- Scene preview for level design and skybox enhancement [Sectors: gaming, 3D content creation]
- What: Convert a skybox/panorama/fisheye into a lightweight Gaussian scene to preview parallax and placement of foreground props.
- Potential tools/products/workflows: Unity/Unreal editor extension to import a single skybox and render small camera moves; kitbashing workflows that combine a “Gaussian backdrop” with authored assets.
- Assumptions/dependencies: Small parallax budgets; correctness drops with very large motion or extreme close-ups.
- Data augmentation for wide-FoV perception [Sectors: robotics, autonomous systems]
- What: Synthesize neighboring views around fisheye/panoramic training frames to increase viewpoint diversity for detectors/segmenters.
- Potential tools/products/workflows: A PyTorch/ROS2 data loader that calls UniSHARP to create perturbed camera views; curriculum to augment indoor navigation datasets.
- Assumptions/dependencies: Synthetic views inherit biases and may not preserve exact metric geometry; suitable for non-safety-critical training augmentation, not for ground-truth labeling.
- Rapid capture planning and view recommendation [Sectors: surveying, drones, creative workflows]
- What: From one image, estimate coarse geometry and suggest next best views to reduce occlusions in subsequent capture.
- Potential tools/products/workflows: Drone or mobile app that uses ray-distance space to estimate disocclusions and propose waypoints; UI overlays for “move here” guidance.
- Assumptions/dependencies: Assumes static scenes and reliable depth priors; UniK3D pseudo-depth quality affects suggestions.
- Pose-free bootstrapping for ad-hoc cameras [Sectors: camera OEMs, QA/ops, research]
- What: Estimate a parametric pinhole/fisheye model from the predicted ray field when intrinsics are unknown.
- Potential tools/products/workflows: A calibration helper that initializes intrinsics in lab QA; auto-detection of camera class (perspective/fisheye/pano) in ingestion pipelines.
- Assumptions/dependencies: Requires accurate ray field prediction; refined calibration still recommended for precision-critical tasks.
- FoV-stratified QA and benchmarking across camera types [Sectors: academia, camera OEMs, platform QA]
- What: Use the paper’s benchmark to evaluate NVS/3DGS models uniformly from 60° to 360° FoV.
- Potential tools/products/workflows: Continuous integration tests that run PSNR/SSIM/LPIPS across perspective, wide-FoV, fisheye, and ERP subsets; model selection and regression testing.
- Assumptions/dependencies: Benchmark availability and licensing; domain coverage (indoor/outdoor) may need extension by users.
- Immersive CCTV/fisheye control-room views [Sectors: security operations, facilities]
- What: Generate slight alternative viewpoints from single fisheye frames to help operator situational awareness and reduce visual distortion.
- Potential tools/products/workflows: VMS plugin that creates stabilized, slight parallax-enhanced replays from dome cameras.
- Assumptions/dependencies: Not for evidentiary use; disclose synthetic viewpoints; limited to small motions and static scenes to avoid misleading geometry.
- Teaching and demos of universal camera geometry [Sectors: education]
- What: Interactive lessons showing how perspective, fisheye, and panoramic rays unify in the ray-distance space.
- Potential tools/products/workflows: Jupyter demo with UniSHARP inference to visualize rays/Gaussians and rendered views.
- Assumptions/dependencies: GPU access for classroom demos or cloud-hosted notebooks.
Long-Term Applications
These use cases require additional research, scaling, productization, or standardization (e.g., larger motion robustness, outdoor generalization, dynamic scenes, and on-device performance).
- 6DoF experiences from a single image via stronger priors [Sectors: XR, media/entertainment]
- What: Combine UniSHARP’s explicit Gaussians with diffusion priors to support larger camera trajectories and robust disocclusion hallucination.
- Potential tools/products/workflows: “Gaussian photo” pipeline that exports a compact 6DoF asset playable in VR viewers.
- Assumptions/dependencies: Needs generative priors, content safety/labeling, and guardrails against unrealistic geometry.
- SLAM/VO initialization and map densification from a single frame [Sectors: robotics, AR navigation]
- What: Use feed-forward Gaussians as priors to kickstart tracking and fill holes in sparse maps, especially for fisheye and panoramic rigs.
- Potential tools/products/workflows: ROS2 node that seeds a Gaussian map, then refines with multi-frame updates; hybrid Gaussian–factor-graph back-ends.
- Assumptions/dependencies: Temporal consistency and drift management; dynamic scenes and lighting changes must be handled.
- On-device, real-time monocular NVS for edge cameras [Sectors: mobile, wearables, drones]
- What: Run UniSHARP-like models at interactive rates on NPUs/ISPs for live parallax previews and compositing.
- Potential tools/products/workflows: Hardware co-design for generic-camera Gaussian rasterization; NNAPI/CoreML delegates; quantized models.
- Assumptions/dependencies: Significant optimization/approximation; energy and thermal constraints; memory bandwidth for high-res inputs.
- Self-calibrating camera fleets using learned ray fields [Sectors: smart cities, automotive, retail analytics]
- What: Continual refinement of intrinsics/extrinsics across thousands of heterogeneous cameras using pose-free ray estimation as priors.
- Potential tools/products/workflows: Fleet calibration service that monitors drift, flags outliers, and updates parameters over time.
- Assumptions/dependencies: Robust ray prediction in the wild; privacy-safe processing; integration with classical calibration checks.
- Standardized “Gaussian Photo” interchange and streaming [Sectors: platforms, imaging standards]
- What: A shareable format for compact Gaussian scenes bundled with a photo to enable look-around playback across apps.
- Potential tools/products/workflows: Open spec, player SDKs for web/mobile/VR, progressive streaming and LOD management.
- Assumptions/dependencies: Interoperability agreements; compression and security; provenance/watermarking of synthesized views.
- Safety-aware augmentation for autonomous systems [Sectors: automotive, mobile robotics]
- What: Use synthetic neighbor views to stress-test perception under fisheye/panorama distortions or rare poses.
- Potential tools/products/workflows: Scenario generators that sample poses in ray-distance space to probe model failure modes.
- Assumptions/dependencies: Strict separation from operational perception; validation against real data; regulatory approval for test use.
- Telepresence with virtual multi-camera from one webcam [Sectors: conferencing, creator tools]
- What: Produce alternate angles and camera moves from a single webcam or 360° pod to enhance remote presence.
- Potential tools/products/workflows: Conferencing plugins that render slight perspective changes and stabilized crops in real time.
- Assumptions/dependencies: Dynamic subjects and non-rigid motion remain hard; latency budgets and compute cost constraints.
- Rapid digital-twin bootstrapping from sparse imagery [Sectors: facilities management, retail, construction]
- What: Initialize a coarse, navigable digital twin from a few panoramas or wide-FoV stills before dense capture or Lidar is available.
- Potential tools/products/workflows: Site survey apps that create interim 3D previews for planning and stakeholder review.
- Assumptions/dependencies: Non-metric geometry and limited accuracy; transition plan to metric scans for final twins.
- Forensic and policy frameworks for synthetic viewpoint disclosure [Sectors: public policy, legal, journalism]
- What: Guidelines, metadata, and UI cues when displaying synthesized views to prevent misinterpretation as ground truth.
- Potential tools/products/workflows: Standardized “synthetic viewpoint” flags in EXIF-like metadata; audit trails and reproducibility records.
- Assumptions/dependencies: Multi-stakeholder standardization; integration with platform integrity tools.
- Outdoor, long-range, and dynamic-scene generalization [Sectors: mapping, sports, live events]
- What: Robust monocular NVS for wide baselines, moving crowds, specular surfaces, and challenging lighting.
- Potential tools/products/workflows: Domain-adaptive training with outdoor datasets; motion-layered Gaussians; photometric invariance.
- Assumptions/dependencies: More diverse training data and objectives; scene dynamics modeling; potential sensor fusion (IMU/event cameras).
Notes on cross-cutting assumptions and dependencies
- Viewpoint budget and realism: The method excels at small to moderate viewpoint changes with high overlap; quality drops for large baselines without generative priors.
- Scene assumptions: Static or slowly changing scenes; dynamic objects may produce artifacts or floaters without temporal modeling.
- Camera calibration: Known intrinsics improve quality; pose-free mode works but depends on accurate ray field prediction.
- Compute: GPU acceleration (desktop or cloud) is recommended today; mobile/edge use requires optimization, quantization, and hardware support.
- Data and supervision: Training used mixed-camera datasets and pseudo-depth from UniK3D; domain shifts (e.g., outdoor, nighttime) may require fine-tuning.
- Ethics and disclosure: Synthetic viewpoints should be clearly labeled in consumer and security contexts; not a substitute for metric ground truth in safety-critical decisions.
Glossary
- 3D Gaussian Splatting (3DGS): An explicit 3D scene representation that renders scenes with Gaussian primitives for real-time performance. "3D Gaussian Splatting replaced expensive volume rendering with explicit primitives and real-time rasterization~\citep{3dgs}."
- Anti-aliased: Designed to reduce aliasing artifacts, yielding smoother, more accurate reconstructions. "while later anti-aliased variants improved unbounded and high-resolution reconstruction~\citep{barron2022mipnerf360,barron2023zipnerf}."
- Bernoulli mask: A stochastic binary mask sampled from a Bernoulli distribution to randomly drop elements during training. "via a Bernoulli mask "
- Covariances: Parameters describing the shape/orientation of Gaussians in 3D, controlling their spread. "we ensure that Gaussian primitives defined by 3D centers, covariances, and appearance are optimized in a consistent metric space instead of being tied to projection-specific image grids."
- Disocclusions: Regions that become visible from a new viewpoint but were previously occluded. "The first layer aligns with the visible surface, while the second layer captures disocclusions and high-frequency structures beyond a single surface hypothesis."
- Equirectangular projection (ERP): A spherical-to-image mapping used for panoramas with uniform latitude-longitude sampling. "Each frame is rendered as a ERP image and all cameras share a fixed orientation."
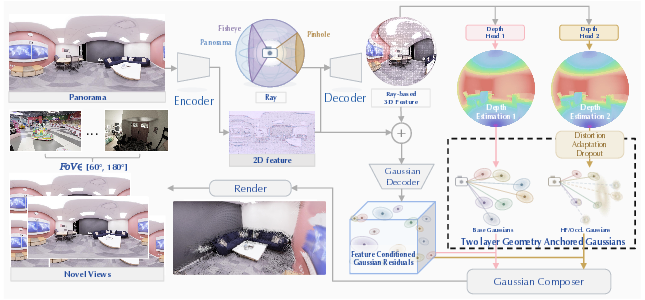
- Feature Conditioned Gaussian residuals: Learned adjustments to Gaussian parameters conditioned on fused 2D/3D features to increase fidelity. "predicts Feature Conditioned Gaussian residuals"
- Field of view (FoV): The angular extent of the observable world captured by a camera. "The benchmark is further stratified by field of view (FoV) to enable fine-grained assessment of the universal monocular rendering task."
- Floater suppression: A regularization technique to reduce spurious opaque Gaussians (“floaters”) near depth discontinuities. "floater suppression near abrupt first-layer inverse-distance changes"
- Gaussian decoder: A network module that predicts residuals for Gaussian parameters from feature inputs. "a Gaussian decoder predicts a residual tensor "
- Gaussian primitives: Explicit 3D Gaussian elements (with position, shape, color, opacity) used to represent scenes. "Specifically, Gaussian primitives are arranged along rays and radial distances in a ray-based universal representation"
- Gaussian regularization: Loss terms that stabilize Gaussian parameters beyond photometric supervision. "Gaussian regularization stabilizes degrees of freedom that are weakly constrained by photometric loss."
- Geometry Anchored Gaussians: A two-layer initialization of Gaussians aligned to predicted geometry in a ray-based space. "we construct two-layer Geometry Anchored Gaussians on a native ray grid."
- Gram statistics: Second-order statistics of feature activations used in perceptual losses to capture texture/style. "where is a perceptual loss computed from deep features and Gram statistics."
- Intrinsics: Internal camera parameters (e.g., focal length, principal point) defining projection geometry. "the ray field is converted into a compact parametric camera by fitting pinhole intrinsics or Fisheye parameters"
- Multi-view stereo cost volumes: 3D tensors encoding photometric matching costs across views to infer depth. "learned image-based rendering and multi-view stereo cost volumes"
- Native resolution allocation: Placing Gaussians at the input image’s native resolution to preserve detail. "and allocates Gaussians at native input resolution, preserving geometric priors and high-frequency image details without camera-specific resizing."
- Neural radiance fields (NeRF): Neural scene representations that model view-dependent radiance and density for photorealistic rendering. "Neural radiance fields established continuous scene representations for photorealistic rendering~\citep{mildenhall2021nerf}"
- Opacity: The per-Gaussian transparency parameter controlling its contribution to rendered pixels. "Appearance supervision encourages the accumulated opacity to cover valid pixels"
- Parametric camera: A compact camera model defined by a small set of parameters (e.g., pinhole or fisheye). "the ray field is converted into a compact parametric camera by fitting pinhole intrinsics or Fisheye parameters"
- Perceptual loss: A loss computed from deep-feature comparisons to capture perceptual similarity. "where is a perceptual loss computed from deep features and Gram statistics."
- Pinhole camera assumption: The simplifying assumption that images are formed by ideal perspective projection without distortion. "since SHARP maps every pixel in normalized space under the pinhole camera assumption"
- Pose-free inference: Rendering without known camera parameters by estimating camera geometry from the input. "For scenarios where camera parameters are unavailable, UniSHARP also supports pose-free monocular inference from a single RGB image."
- Quaternion: A four-parameter representation of 3D rotation used here to orient Gaussians. " is the identity quaternion"
- Rasterization: Converting geometric primitives into pixels, here used for real-time Gaussian rendering. "real-time rasterization"
- Ray-based universal representation: A camera-agnostic scene layout organizing Gaussians along rays and distances. "a ray-based universal representation organizes Gaussian primitives along rays and radial distances"
- Ray-distance space: A coordinate system parameterizing 3D points by unit direction and radial distance from the camera center. "UniSHARP adopts a unified ray-distance space inspired by UniK3D~\citep{piccinelli2025unik3d}."
- Ray field: A per-pixel set of unit direction vectors describing viewing directions. "UniSHARP uses a predicted per-pixel unit ray field"
- Sobel alignment: A regularization aligning depth edges via Sobel gradient operators at multiple scales. "and multi-scale Sobel alignment in log-distance space:"
- Solid angle: A measure of angular area on a sphere; in ERP, pixels near poles cover smaller solid angles. "Equirectangular panoramas oversample polar regions because pixels near the poles correspond to narrower solid angles than those at the equator."
- Spherical Gaussian initialization: Initializing Gaussians on a sphere to accommodate panoramic distortions. "including spherical Gaussian initialization and distortion-aware probabilistic dropout"
- Splatting: Rendering by projecting and blending Gaussian primitives into the image plane. "the target geometry produced after splatting."
- Tangent-plane: A local plane orthogonal to a ray used to parameterize in-plane Gaussian offsets. "channels correspond to tangent-plane center offsets"
- Total variation: A regularizer promoting smoothness by penalizing spatial gradients. "It includes total variation on the second radial layer"
- Unit ray: A direction vector of length one indicating the viewing direction for a pixel. "where is the unit ray"
- Wrap-around topology: The horizontal continuity in equirectangular images where left and right edges meet. "horizontal finite differences use circular boundary handling to respect the wrap-around topology."
- Yin–Yang grids: A spherical sampling scheme for 360° processing that avoids pole singularities. "Yin-Yang grids for 360-degree synthesis~\citep{chen2025splatter360,zhang2025pansplat,lee2025omnisplat,chen2023panogrf}."
Collections
Sign up for free to add this paper to one or more collections.

