- The paper presents an augmentation-based CT-STL framework that integrates continuous-time generalized-mean smooth robustness into trajectory optimization using successive convexification.
- It introduces auxiliary state dynamics and time-dilation to enforce temporal logic constraints robustly, effectively mitigating discretization errors.
- Numerical experiments on double integrator and 6-DoF quadrotor systems validate the method’s scalability and precise continuous-time safety compliance.
Successive Convexification for Trajectory Optimization with Continuous-Time Satisfaction of Signal Temporal Logic Specifications
This paper addresses the integration of continuous-time Signal Temporal Logic (CT-STL) specifications into nonlinear trajectory optimization. The motivation is to move beyond discrete-time STL (DT-STL) constraints, which are typically enforced only on a finite grid and fail to capture inter-sample violations, toward smooth, numerically robust, and theoretically sound continuous-time enforcement. Previous approaches based on mixed-integer programming and standard robustness measures (min, max recursion) for STL carry well-known drawbacks: combinatorial complexity, poor scalability, and nonsmooth, poorly-conditioned optimization landscapes that hinder gradient-based methods. Efforts to smooth these semantics (e.g., log-sum-exp, softmax, polynomial smoothing) introduce approximation error and generally cannot guarantee logical correctness except asymptotically.
Recent developments introduced the Generalized-Mean Smooth Robustness (GMSR) family for DT-STL (Uzun et al., 2024), which replaces min and max with generalized means to provide exact, smooth, and gradient-distributive quantitative semantics. However, for applications in optimal control and trajectory generation, continuous-time robustness must be enforced, particularly for safety or event-driven tasks where unsampled violations are unacceptable. Existing continuous-time methods primarily focus on CBFs for specific STL fragments (\always{} and variants) or employ specialized heuristics to patch discrete-time planners, but lack a general, optimization-friendly CT-STL formulation.
Main Contributions and Framework Overview
The core contribution is a novel augmentation-based parameterization of CT-STL for trajectory optimization, developed within a successive convexification (SCP) pipeline. The key technical insight is that generalized mean-based robustness and its favorable properties (smoothness, logical exactness, nonlocal gradients) can be lifted from discrete-time into continuous time by interpreting finite sums and products as normalized integrals and geometric integrals (multiplicative calculus) over time intervals (2606.06896).
These continuous-time aggregates are realized by dynamically augmenting the nonlinear system: auxiliary states encode the GMSR-based logic and temporal semantics. This enables temporal requirements such as \always{}, \eventually{}, and \until{} to be imposed on the full continuous trajectory in a way that is robust to discretization choices and compatible with existing optimal-control transcriptions. The framework is further equipped with:
- Time-dilation for free-final-time problems, decoupling trajectory duration from the grid.
- Finite-dimensional control parameterization (e.g., FOH/ZOH nodes).
- Multiple-shooting discretization for state and input trajectories, allowing for efficient linearization and sparse problem structure.
- Solution via the prox-convex SCP method, which ensures global convergence of the nonconvex finite-dimensional program by iteratively solving convex subproblems with carefully constructed local models (Uzun et al., 22 Dec 2025).
The main benefit of the augmentation-based CT-STL realization is that all logic and temporal-logic derivatives are handled by the same multiple-shooting and differentiation machinery as the original ODE, eliminating the need for explicit bookkeeping of all intermediate sensitivities on the integration grid.
Continuous-Time GMSR Parameterization
The construction generalizes the GMSR logic from DT-STL to continuous time as follows:
- Atomic Predicates: Γμ(x,t)=g(x(t))
- Logical Connectives (\wedge, \vee, \Rightarrow): GMSR expressions combine margins of subformulas with a smooth, positively-shifted, generalized mean. This is essential for robustness (avoiding gradient masking and supporting weighting).
- Temporal Operators (\always{}, \eventually{}): Discrete aggregates (min/max over time samples) are replaced by continuous-time normalized geometric and additive integrals. For instance, the \always{} operator is encoded as a hybrid of a path-integral penalty on violations and a multiplicative geometric state tracking satisfaction.
These operators are implemented by augmenting the ODE with additional states, e.g., for \always{} over I=[a,b],
η˙G(t)=∣I∣11I(t)ηG(t)log(∣Γφ(x,t)∣+2+ε),ξ˙G(t)=∣I∣11I(t)∣Γφ(x,t)∣−2
where [⋅]+ and [⋅]− denote positive and negative part operators. Analogous constructions handle \eventually{} and \until{}. The auxiliary dynamics are fully differentiable with respect to both state and control variables, enabling application of state-of-the-art gradient-based nonlinear programming techniques.
Solution Pipeline: Time-Dilation, Control Discretization, and SCP
- The problem is formulated with free-final time by introducing a dilation variable; the ODE and time intervals are mapped to a fixed unit interval, and the final time is an optimization variable.
- Control inputs are discretized via FOH and ZOH representations, with care taken to avoid infeasibility issues that arise for interval allocations.
- Multiple-shooting divides the trajectory into segments, each with its own initial condition and controls, and defects propagate continuity.
- The entire nonlinear program (NLP) is then solved with the prox-convex SCP method, which guarantees decrease and convergence by penalizing constraint violation, and adaptively regularizing according to progress.
Numerical Results: Double Integrator and 6-DoF Quadrotor
The framework is demonstrated on several optimal control problems:
\always{} (Global) Example
A double-integrator system must reach a goal state while always avoiding implication-type obstacles. The augmented states track obstacle penetration; terminal values encode whether any violation occurred. The resulting trajectory bends around forbidden regions.
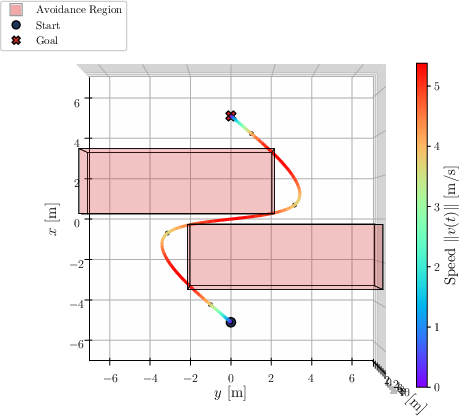
Figure 1: Optimized trajectory for the \always{} task, showing deviation from the nominal path to satisfy all obstacles.
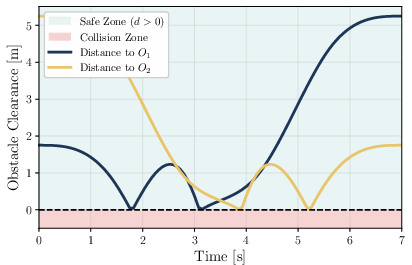
Figure 2: Obstacle-clearance signal histories demonstrating persistent satisfaction of both constraints over the interval.
\eventually{} (Reachability) Example
The vehicle must visit three spatial waypoints during its trajectory. Each waypoint is associated with geometric-integral and additive auxiliary states, and satisfaction is confirmed when coverage of all three is achieved.
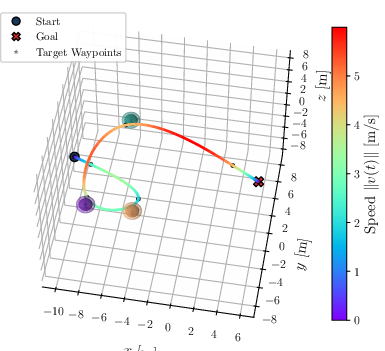
Figure 3: Trajectory visiting all three waypoints via detours from the optimal straight path.
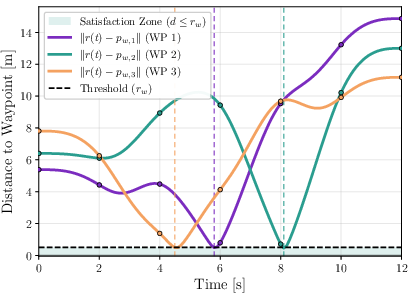
Figure 4: Distance-to-waypoint signals, with entry into each waypoint region verified by the traces.
\until{} (Temporal Sequencing) Example
The vehicle is constrained to stay below a speed threshold until a region ("charging station") is reached. Auxiliary states encode accumulated violations and the logical composition with event detection; speed and region entry times reflect correct semantics.
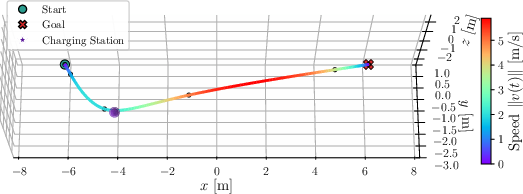
Figure 5: \until{} task trajectory, with the vehicle diverting to the charging station before completion.
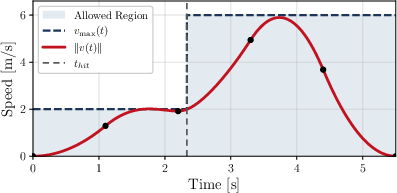
Figure 6: Speed profile confirming the constraint is not violated before the visit event.
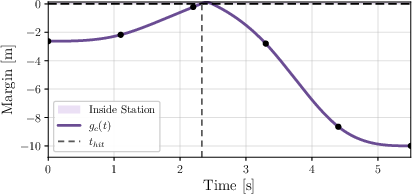
Figure 7: Evolution of the charging-station margin, with a clear crossing indicating the event time.
6-DoF Quadrotor: Moving Waypoints & Obstacles
A high-dimensional free-final-time problem couples moving waypoints, time-varying forbidden regions (oscillating gaps), and state and input bounds. The system must dynamically synchronize with these requirements, visiting moving targets and traversing moving gaps.
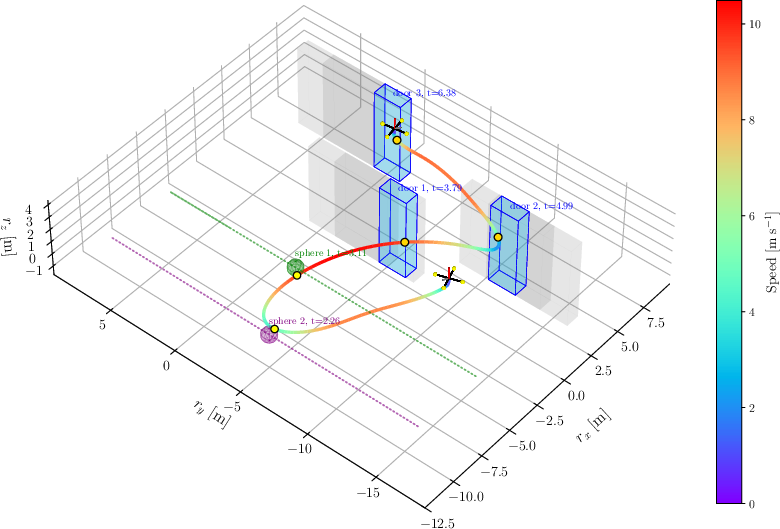
Figure 8: Optimized 3D trajectory for the quadrotor; the path intercepts moving waypoints and passes through time-varying gaps.
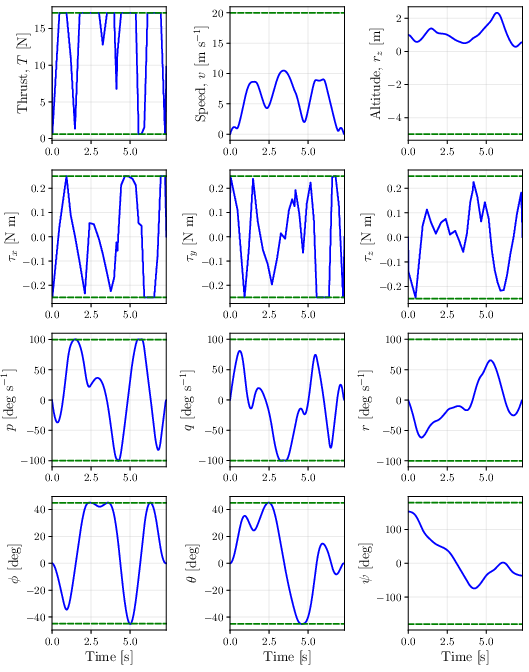
Figure 9: State and input histories demonstrating compliance with all physical bounds throughout the maneuver.
Implications and Future Directions
This augmentation-based CT-STL framework delivers a smooth and scalable approach to enforcing rich temporal logic specifications in optimal control. By embedding CT-STL directly into optimal control pipelines with minimal structural changes, it is now feasible to address tasks requiring continuous-time safety, timed event visits, or temporal conditions in complex nonlinear systems.
Key implications:
- Gradient-based NLP for CT-STL: The smoothness and gradient-distributiveness of GMSR admit compatibility with large-scale, gradient-based solvers (e.g., SCP, SQP, Newton-type).
- Scalability and Generality: The framework is transcription-independent and applies to a broad class of nonlinear systems.
- Resilience to Discretization: Continuous-time semantics mitigate conservatism and avoid lost violations in between discretization nodes, which is critical for safety in robotics and aerospace.
- Open Problems: Extending the approach to stochastic/uncertain systems, hybrid dynamics, and hierarchical/multi-agent settings are concrete directions. Improving auxiliary state representations for complex nested STL formulas and integrating with verification and learning methods remain substantial avenues for advancing formal methods-driven control.
Conclusion
The proposed successive convexification framework for CT-STL-constrained trajectory optimization leverages continuous-time GMSR-based logical augmentation, time-dilation, multiple-shooting, and a convergence-guaranteed SCP algorithm. The results establish that the approach enables continuous-time satisfaction of rich temporal logic requirements across various system classes and temporal constructs, with strong numerical performance and verifiable specification adherence (2606.06896).