- The paper introduces a noise-statistics-driven closed-loop tactile reflex controller that automatically calibrates force limits without manual tuning.
- It employs three prioritized channels—anti-slip, force-protection, and weight-adaptive release—to dynamically modulate grip force and prevent object deformation.
- Real-world experiments demonstrate 100% slip detection accuracy and high success rates in dynamic pouring tasks, validating its robust performance.
TactileReflex: Noise-Statistics-Driven Reflex Control for Force-Sensitive Manipulation
Motivation and Background
Robotic manipulation of fragile deformable containers demands robust, real-time grip-force regulation within a narrow operational margin: insufficient force leads to slip, while excessive force causes irreversible deformation. This scenario is especially acute in tasks involving compliant objects like thin-walled plastic cups, where load distribution shifts dynamically during actions such as pouring. Existing solutions using F/T sensors or vision-based tactile sensors struggle with either calibration complexity, latency, or lack of interpretable safety guarantees. End-to-end learning policies similarly offer minimal transparency and cannot enforce strict force bounds. The paper "TactileReflex: Noise-Statistics-Driven Vision-Tactile Reflex Control for Force-Sensitive Manipulation" (2605.23568) introduces a paradigm that leverages intrinsic sensor noise profiles to calibrate tactile reflex thresholds, obviating the need for manual parameter tuning or force references.
System Architecture and Processing Pipeline
TactileReflex embodies a plug-and-play, closed-loop controller that intercepts gripper commands from an upstream policy (trajectory, teleop, or learned) and injects real-time tactile corrections. The hardware platform is a single-arm robot with a Piper gripper coupled to dual MC-Tac vision-based tactile sensors. The software stack operates at ~12 Hz, with each cycle executing synchronized image capture, proxy extraction, reflex evaluation, and command transmission.
Key tactile proxies extracted per sensor are:
- Shear Intensity (Sy): Median optical flow in the gravity-aligned direction, robust to contact geometry and area asymmetry.
- Contact Intensity (Fn): Dimensionless measure proportional to normal force.
- Center of Pressure (C): Gravity-aligned coordinate mean, supporting detection of load redistribution.
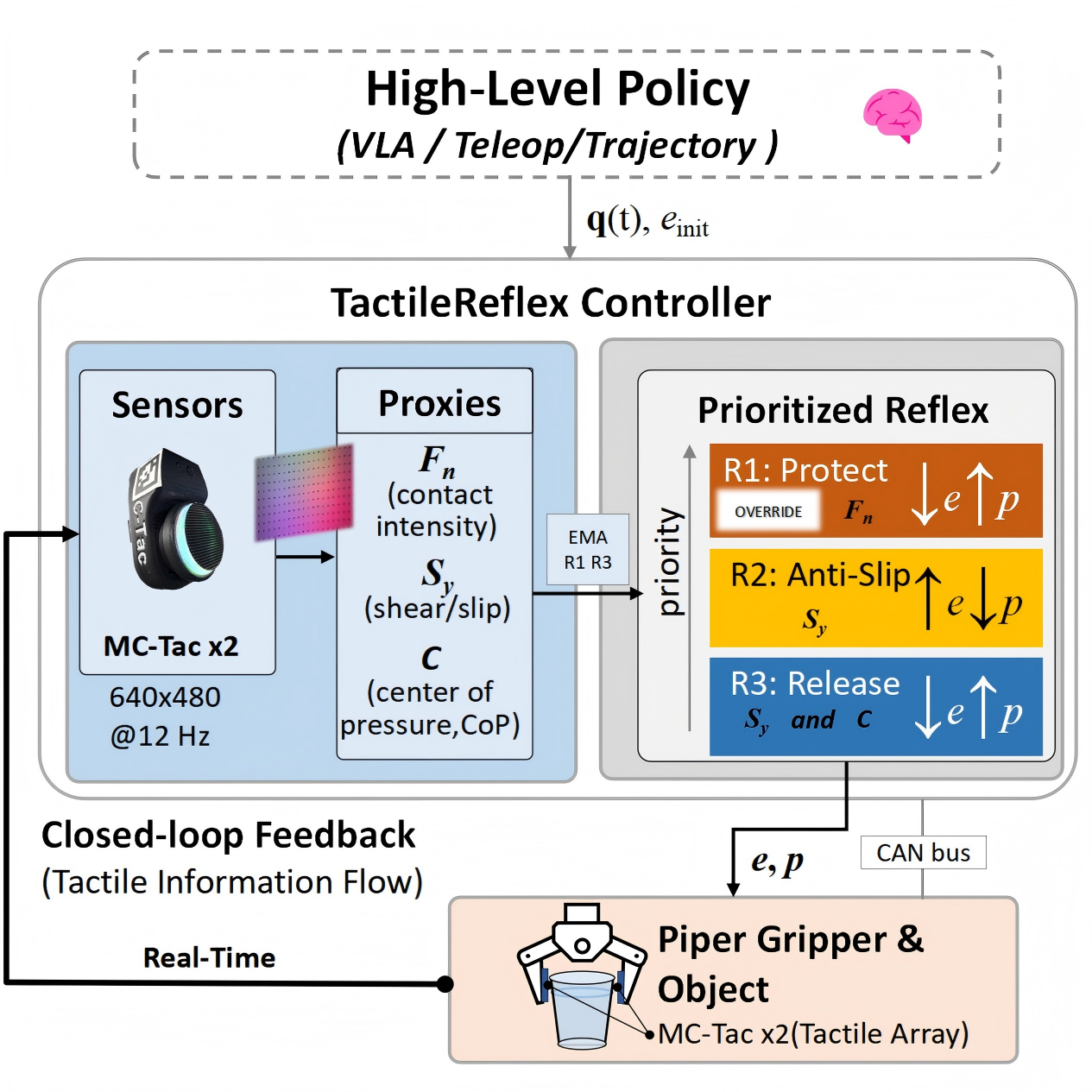
Figure 1: System overview of TactileReflex architecture, showing closed-loop reflex layer beneath high-level policy, dual MC-Tac sensors, and image-level proxy extraction.
Thresholds for reflex activation are calibrated via percentiles of static noise collected during a brief (~2 min) protocol: P95 for quiet-shear, P99.9 for force-protect, and conservatively selected values for slip and CoP-based load release. Universal thresholds (e.g., θs, γ) are transferrable across objects, while material-dependent thresholds are automatically re-derived for each new target.
Reflex Controller Design and Channel Prioritization
The reflex controller operates in three prioritized channels:
- Anti-slip (R2): Rapidly tightens grip when Sy exceeds slip threshold θs, with single-frame responsiveness.
- Force-protect (R1): Caps effort and loosens stroke when Fn surpasses Fn0, overriding all other channels.
- Weight-adaptive Release (R3): Drains accumulated effort when load decreases, detected via a shift in Fn1 and quiet-shear precondition.
Channels synergistically prevent both object drop and deformation. R2 and R3 are mutually exclusive per cycle, R1 operates independently and can override. Incremental adjustments in effort and stroke are controlled to preempt over-tightening or excessive force.
Experimental Evaluation
Comprehensive real-robot experiments validate TactileReflex across two materials (compliant soft cup vs. rigid hard cup), ablation settings, and a dynamic pouring task.
Signal Robustness and Calibration
Calibration demonstrates material-independence in Fn2 noise floor and slip detection: the slip threshold Fn3 yields 100% TPR, 0% FPR, regardless of large L/R asymmetry (up to 10x in Fn4). Fn5 and CoP thresholds require material-specific calibration, but are automatically derived from noise statistics.
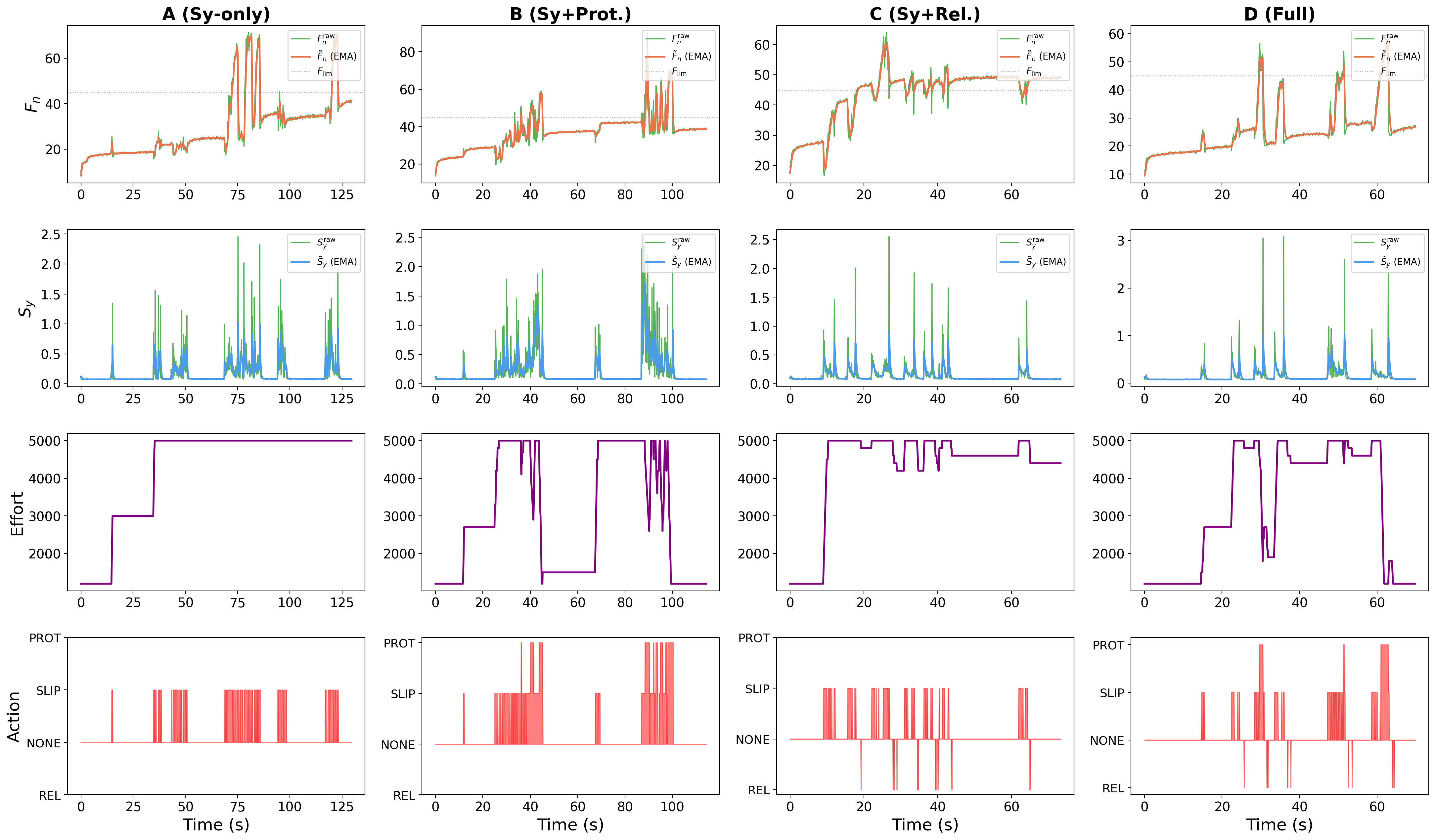
Ablation Study
Systematic ablation reveals strict necessity for all three channels:
Dynamic Pouring Task
Fixed-effort baselines universally fail (0/10), not through object drop but through pose drift: the cup slides within the gripper, breaking orientation alignment (Fig. 5 left). TactileReflex achieves 9/10 success (Fig. 5 right), with real-time effort modulation maintaining stable pose and suppressing slip transients, even as liquid load dynamically redistributes.
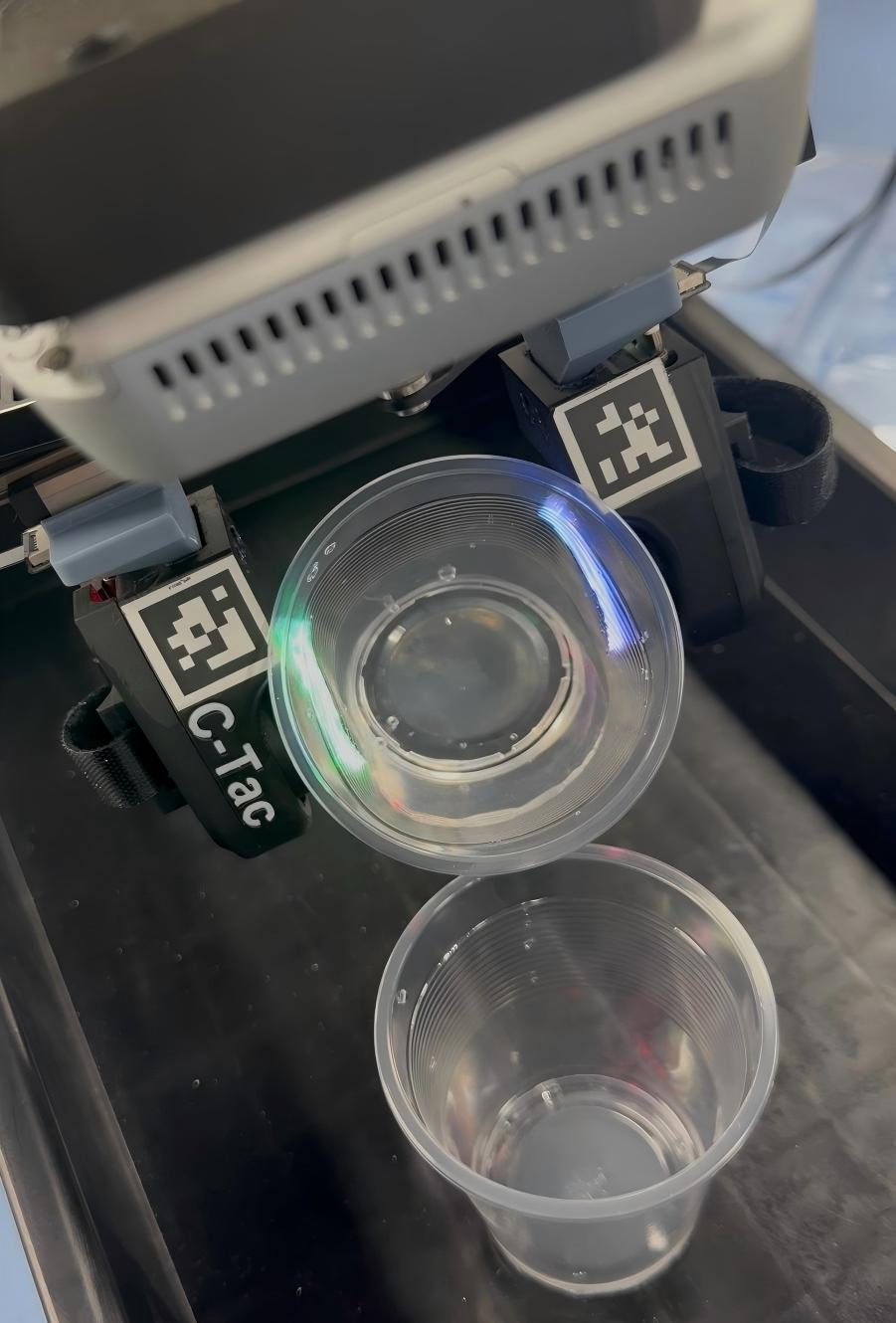
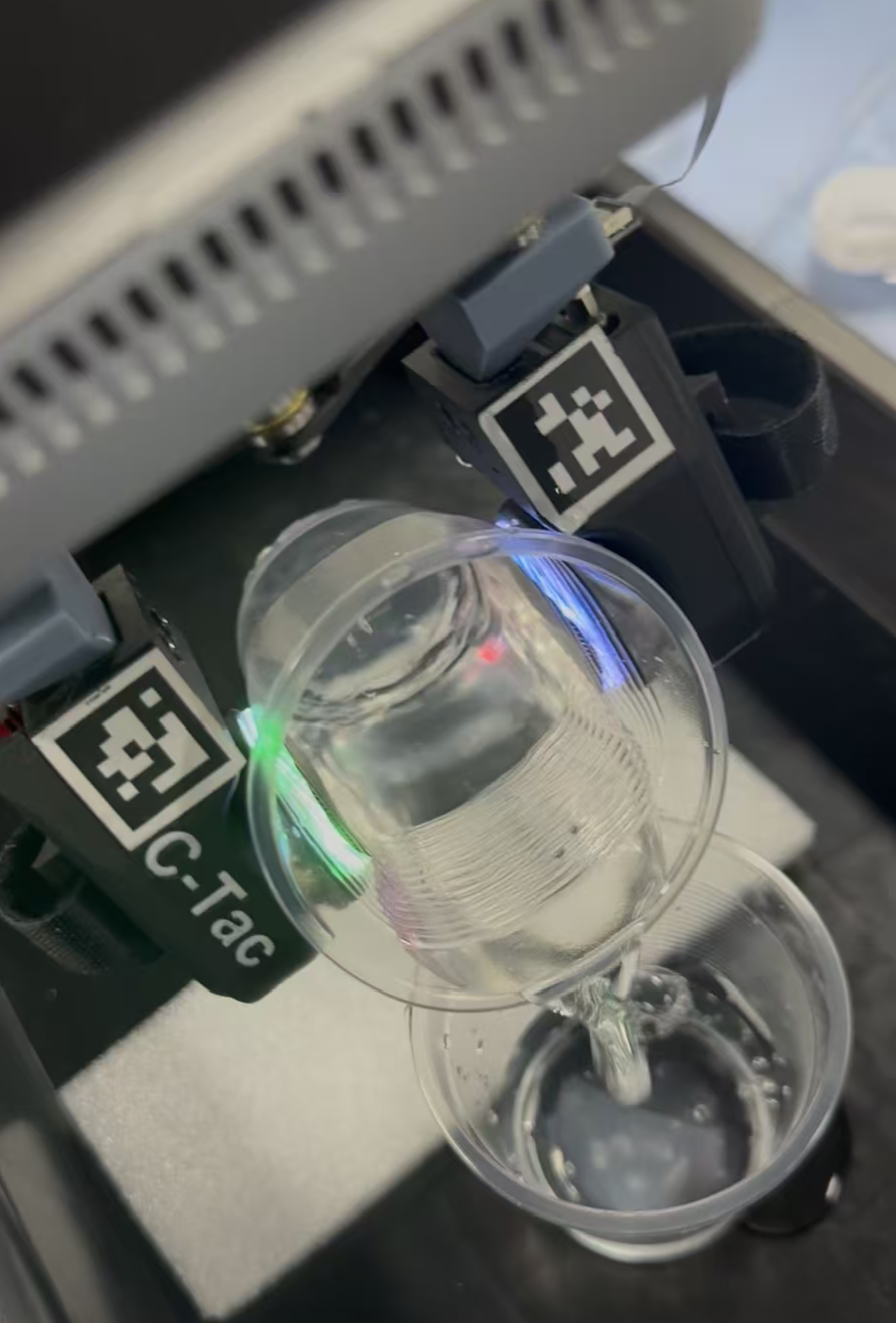
Figure 3: Pouring task comparison; left: without reflex, cup slides and cannot pour; right: with reflex, anti-slip maintains correct orientation for successful pouring.
Strong numerical results include:
- Cross-material slip threshold yielding 100% true-positive, 0% false-positive slip detection.
- Ablation: only full reflex achieves 5/5 success preventing deformation (Fisher exact test, Fn6).
- Pouring: TactileReflex succeeds in 9/10 trials where fixed-effort fails universally.
Channel Interdependencies
Ablation and task results empirically validate that anti-slip alone prevents drop, but the full controller is required for object safety. Protect caps force peaks; Release actively drains excess effort but only under conditions enabled by Protect. Their synergy is indispensable in dynamic, force-sensitive manipulation contexts.
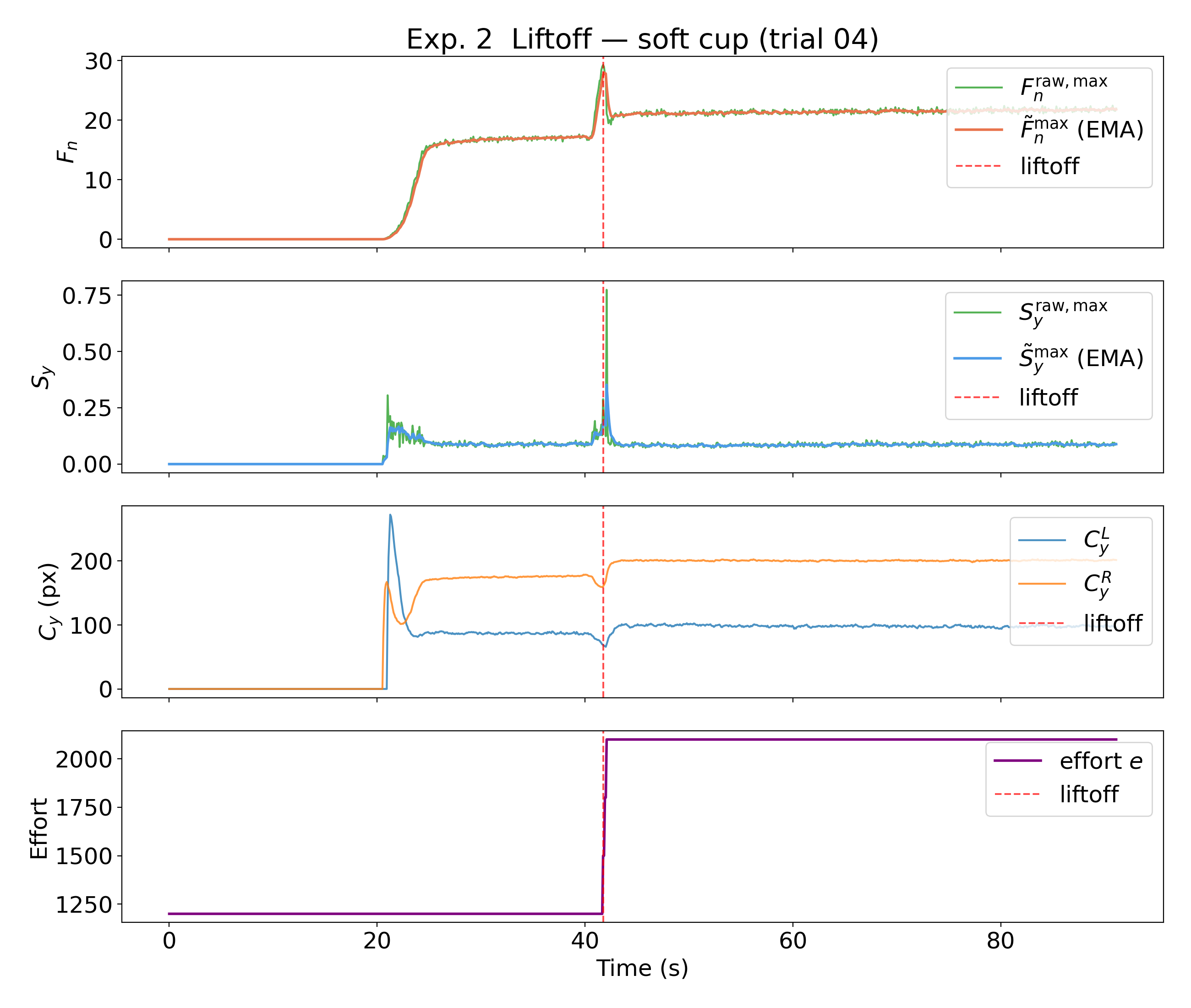
Figure 4: Example liftoff trial with soft cup; anti-slip channel triggers rapidly in response to slip, increasing effort within Fn70.34\,s.
Implications and Future Directions
TactileReflex’s calibration-driven closed-loop paradigm establishes a practical foundation for deploying tactile sensing as a plug-and-play safety layer in manipulation stacks, including vision-language-action pipelines and teleoperation scenarios lacking haptic feedback. By decoupling reflex thresholds from manual tuning and enforcing interpretable force bounds locally, the controller enables scalable, robust demonstration collection for fragile objects and enhances overall safety in physically interactive environments.
From a theoretical standpoint, the area-invariance of the shear metric and universal applicability of slip thresholds across disparate contact geometries suggest potential for generalization to broader object classes and manipulation modalities. Practical integration with RGB tactile data and extension to whole-arm reflexes may yield even more capable closed-loop force regulation.
Anticipated future developments include adaptation to additional gripper designs, deeper integration with end-to-end vision-language-action policies (e.g., RT-2, Fn8), and leveraging calibration-driven tactile control for robust manipulation in unconstrained real-world scenarios.
Conclusion
The paper provides convincing evidence that noise-statistics-based calibration instantiates interpretable reflex control for vision-tactile sensing, capable of real-time, force-sensitive manipulation. TactileReflex unifies anti-slip, force-protection, and weight-adaptive effort release in a transparent, closed-loop controller whose synergy is necessary and sufficient for safe manipulation of deformable containers. It advances the practical deployment of tactile sensing as a rigorously validated safety layer in advanced manipulation tasks, with direct implications for the scalability and reliability of data-driven robot learning.