- The paper presents a grasp controller that integrates free-space position control with in-contact force control to minimize object displacement.
- The method utilizes tactile feedback from sensorized 2-DoF grippers to robustly counterbalance external forces such as gravity.
- Experimental evaluations on the TIAGo robot show less than 1mm object displacement, demonstrating significant improvements in force-closure grasping.
Bio-Inspired Grasping Controller for Sensorized 2-DoF Grippers
The paper presents a comprehensive control approach for enhancing robotic grasping in environments with uncertain object poses. By integrating free-space position control with in-contact force control, the controller introduces a solution aimed at minimizing object displacement and accounting for external forces such as gravity.
Introduction
Tactile sensation is crucial in robotics, especially for mobile robots operating in dynamically changing environments. The novel grasping controller presented utilizes tactile feedback, thereby addressing the shortcomings of vision-based grasping methods that lack environmental feedback. The primary focus is to eliminate undesired object displacement and ensure robust force-closure grasps even in the presence of external forces.

Figure 1: Grasping a soft object with TIAGo's sensorized parallel-jaw gripper using force control.
The study draws on human-inspired approaches to robotic grasping that highlight the importance of tactile feedback and phase-based grasping similar to that observed in human behavior [Johansson & Flanagan, 2009]. Prior approaches have mostly focused on fixed-arm robots or did not account for external forces, such as gravity, which are handled in this framework.
Grasp Controller Architecture
The controller is structured to process grasping in three phases: closing, establishing contact, and holding.
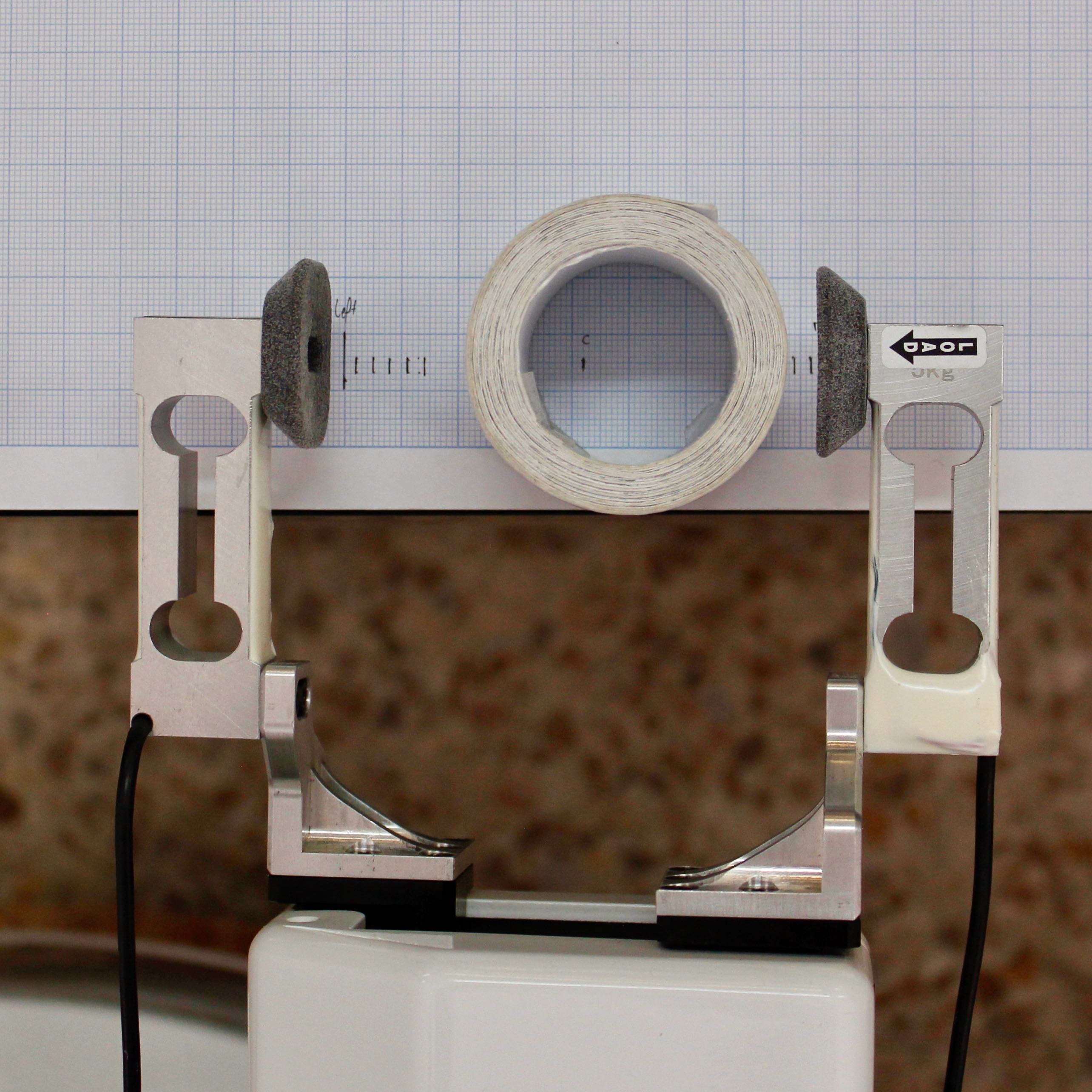
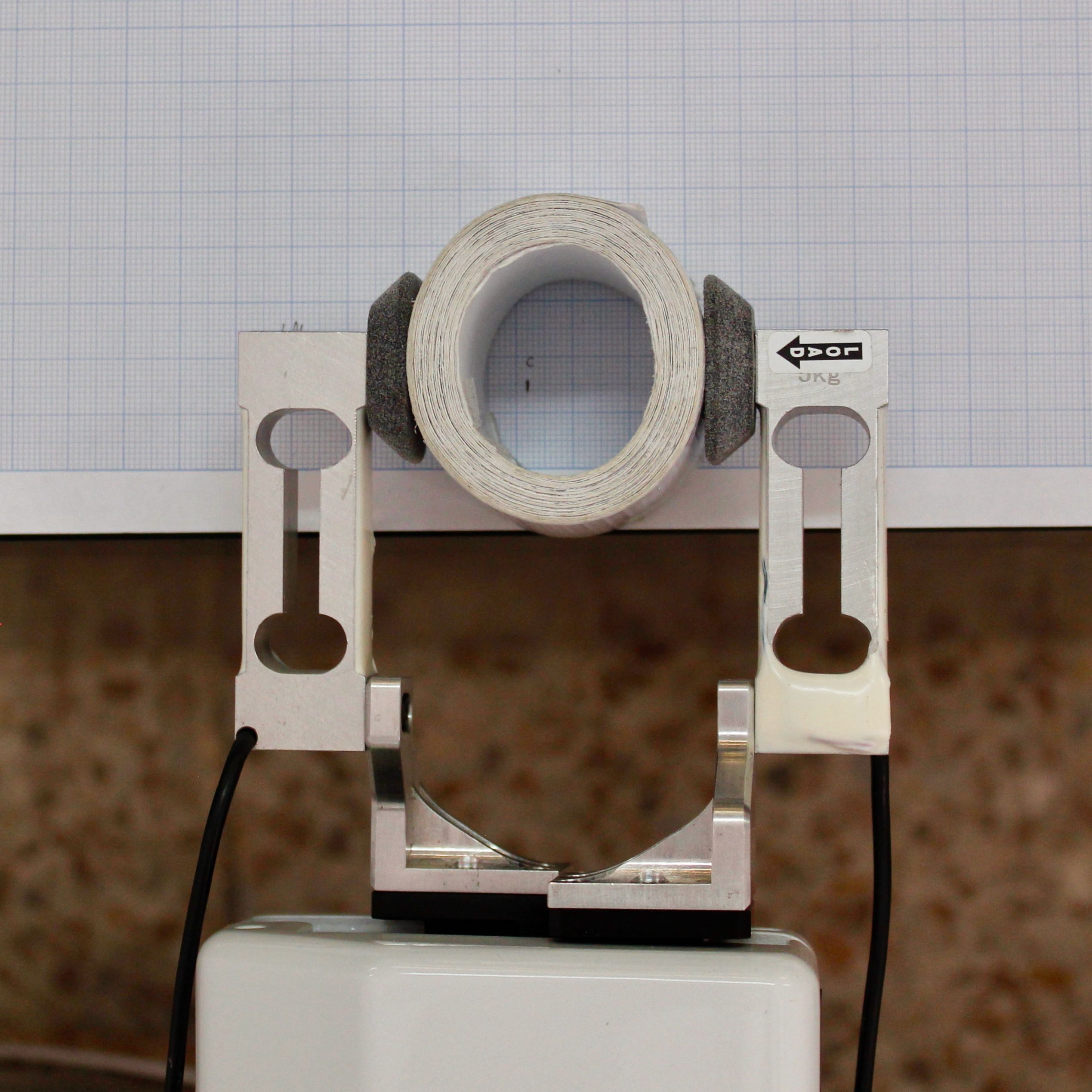
Figure 2: Setup for experiment A: objects are placed with an offset relative to one finger (left) and then grasped (right). After the grasp, the object displacement is measured.
Force-Closure Evaluation
The system ensures force-closure by evaluating the grip configuration to ensure that resultant forces can counterbalance any external disturbances without causing slippage. This evaluation is performed by mapping contact forces into a 6-dimensional wrench space, ensuring compliance with friction cone constraints.
Grasp Force Control
The controller manages both internal and external force components, maintaining an internal force sum that corresponds to a predefined goal. External forces, particularly gravity, are compensated for ensuring object stability during manipulation.
Experimental Evaluation
Experiments on the TIAGo robot demonstrate the system's effectiveness in reducing object displacement and maintaining stability under varying external forces. The displacement was reduced to less than $1mm$ for substantial objects, underscoring the effectiveness of the controller in robustly handling different weights and offsets.
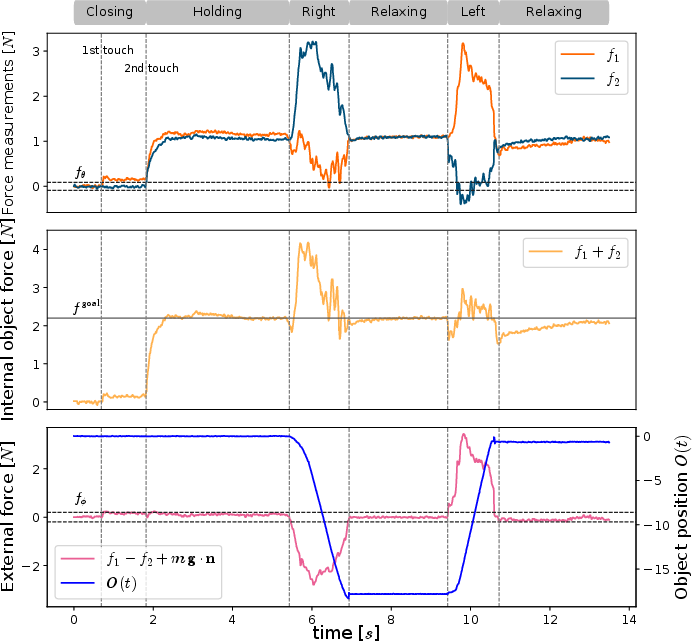
Figure 3: Controller behavior during object grasping (tape roll) and application of external forces, first from the right and then from the left.
Results and Discussion
The experimental results confirm the controller's ability to handle unknown pose and external forces. The separation of internal and external force control is shown to be crucial for maintaining object stability during grasping, particularly under the influence of gravity or interactive forces.
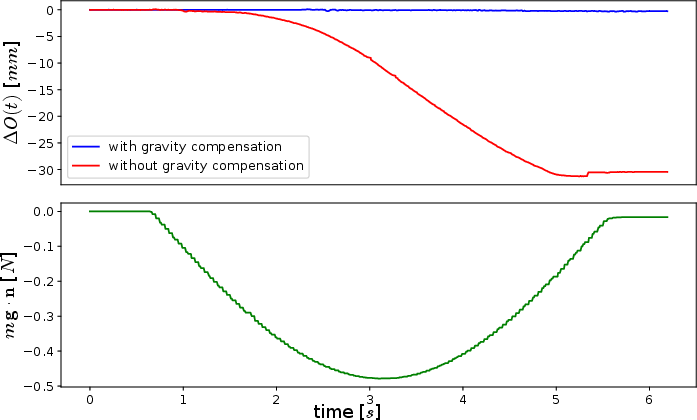
Figure 4: Object drift during gripper rotation while holding the tape roll, with and without gravity compensation.
Conclusion
The presented controller successfully integrates tactile feedback for minimizing object displacement and ensures compliance with external forces, marking an advancement in robotic manipulation technology. Future work may focus on extending this approach to multi-fingered robotic hands and further exploring the decoupling of force control in a generalized 6D space.
This comprehensive examination and evaluation of the grasping controller demonstrate clear capabilities and applications in real-world robotic systems, emphasizing the importance of tactile sensors and adaptive control mechanisms in safe and effective robotic manipulation.