3DSS: 3D Surface Splatting for Inverse Rendering
Abstract: We present 3D Surface Splatting (3DSS), the first differentiable surface splatting renderer for physically-based inverse rendering from multi-view images. Our central insight is that the surface separation problem at the heart of surface splatting admits a direct formulation in terms of the reconstruction kernels themselves. From this foundation we derive a coverage-based compositing model whose per-layer opacity arises directly from the accumulated Elliptical Weighted Average reconstruction weight, yielding anti-aliased silhouettes and informative visibility gradients at sparsely covered edges. Combined with forward microfacet shading under co-optimized HDR environment lighting and density-aware adaptive refinement, 3DSS jointly recovers shape, spatially-varying BRDF materials, and illumination. Because the optimized representation is a set of oriented surface samples, it bridges natively to mesh-based workflows via surface reconstruction from oriented point cloud methods. We evaluate 3DSS against mesh-based, implicit, and Gaussian-splatting baselines across geometry reconstruction, novel-view synthesis, and novel-illumination relighting.




Paper Prompts
Sign up for free to create and run prompts on this paper using GPT-5.
Top Community Prompts
Explain it Like I'm 14
Overview: What this paper is about
This paper introduces 3DSS (3D Surface Splatting), a new way for a computer to learn a 3D scene’s shape, materials, and lighting just by looking at photos taken from different angles. The goal is “inverse rendering”: starting from images and working backwards to figure out what the 3D world must be like. 3DSS uses many tiny “surface dots” to build the scene and renders realistic images in a way that is smooth and friendly to learning algorithms, so the computer can keep improving its guess.
The big questions the paper asks
- How can we recover accurate 3D shape, materials (like color, shininess, and roughness), and lighting from regular photos, without the problems that older methods run into?
- Can we avoid mixing together different surfaces when they overlap in the image, so edges and thin details look clean and realistic?
- Can we make the whole process “differentiable” (smooth to optimize), so a computer can learn from mistakes and improve its 3D model?
How 3DSS works (in simple terms)
First, here’s an analogy to set the stage: imagine reconstructing a sculpture using a huge number of small, flat coins stuck onto its surface. Each coin knows where it sits, which way it faces, how big it is, and what material it represents. If you look at the sculpture from a camera, many coins contribute to each pixel of the picture.
3DSS turns that idea into a practical system. Here are the key ideas, explained with everyday language and a few light technical notes:
- Surface coins (“surfels”): The scene is made of many tiny oriented disks. Each disk has:
- Position and orientation (which way it faces)
- Size and shape in its local plane
- Material info: base color (albedo), how metallic it is, and how rough or smooth it is
- Soft footprints, not hard edges: When a surfel projects to the image, it doesn’t just hit one pixel. It has a soft, roundish “footprint” (like a blurry stamp). Nearby surfels’ footprints overlap and add up, which helps reconstruct a smooth, continuous surface rather than a speckled one.
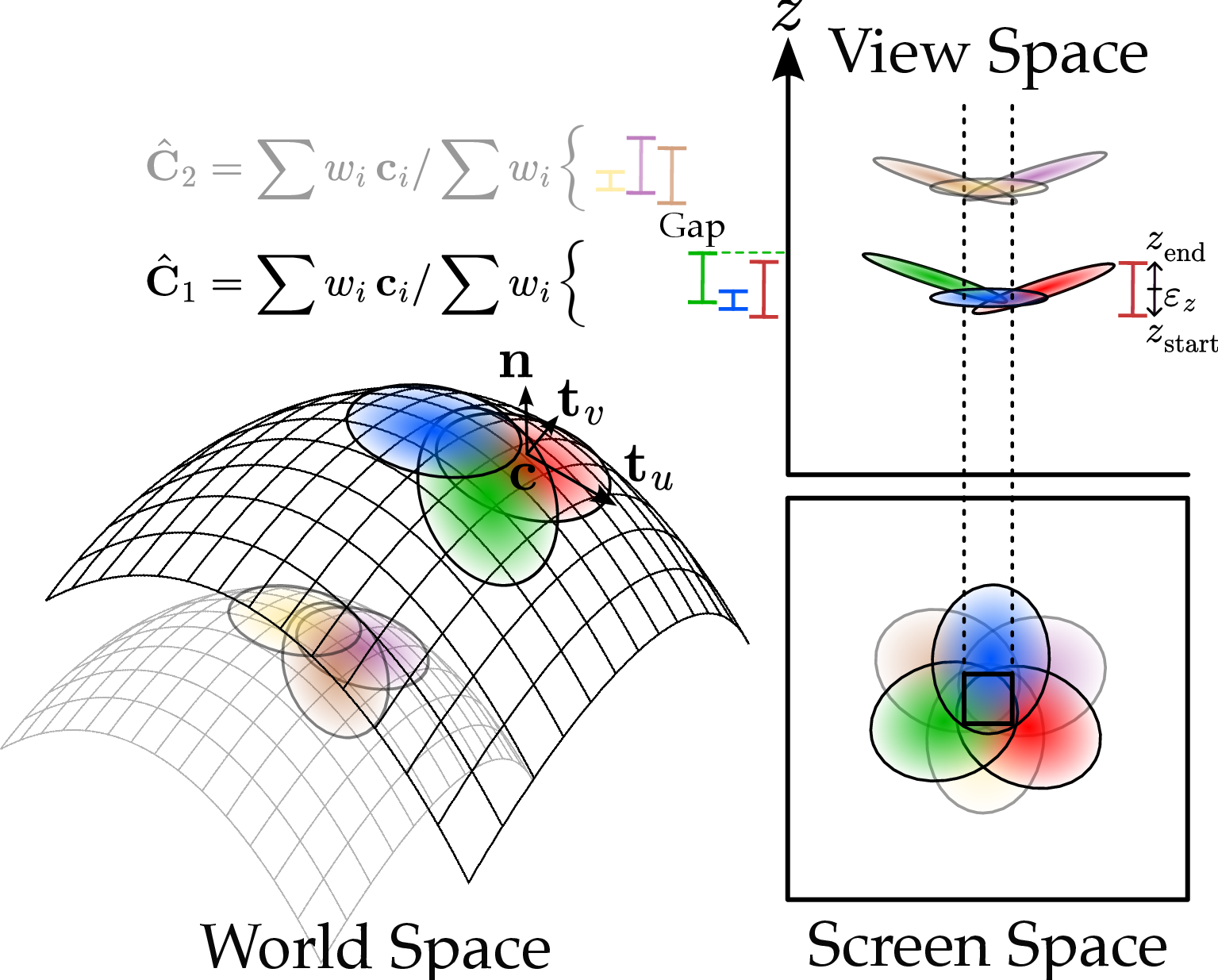
- Separating overlapping surfaces with depth “intervals”: When two surfaces overlap in the image (like a foreground object in front of a background), we must not blend their materials together. 3DSS gives each surfel a small near–far depth range, then:
- Sorts surfels by where their depth range begins
- Groups surfels into a “layer” if their depth ranges overlap (they belong to the same surface at that pixel)
- Starts a new layer when there’s a gap (meaning a different surface)
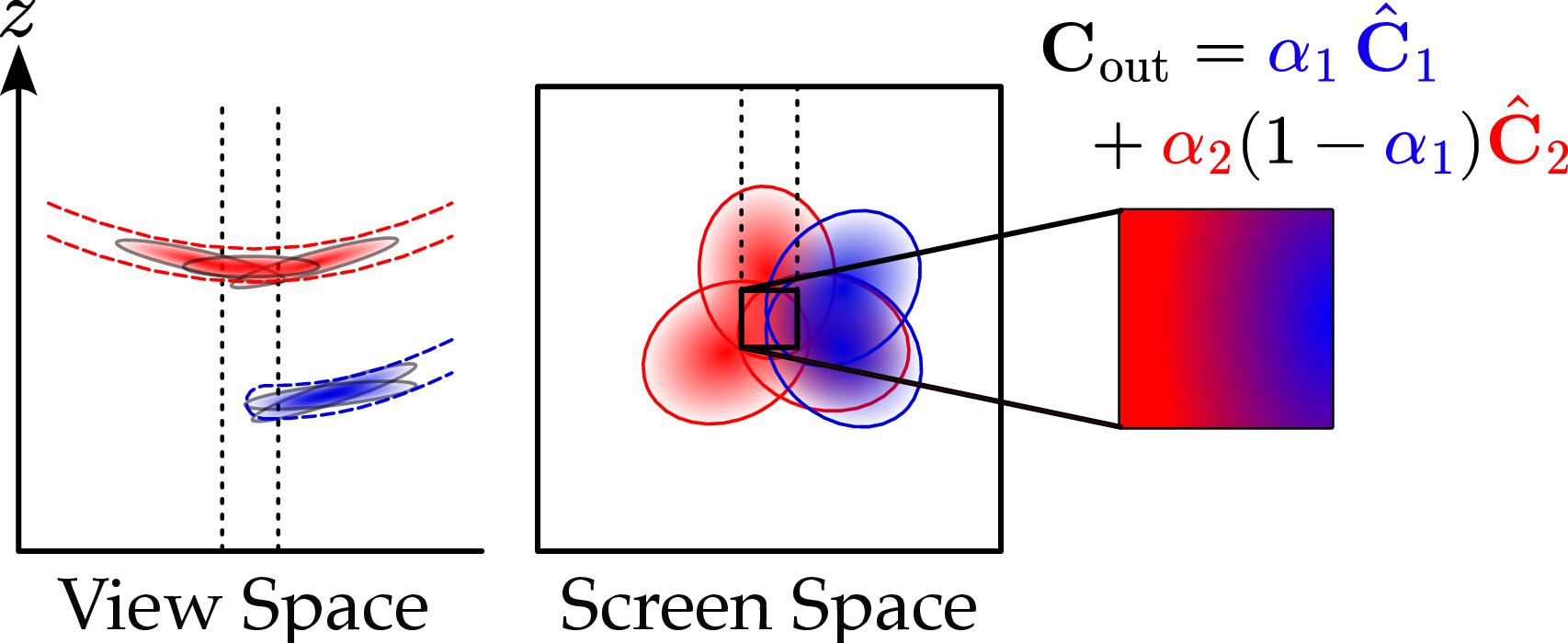
- This creates multiple clean surface layers per pixel, so foreground and background don’t get mixed.
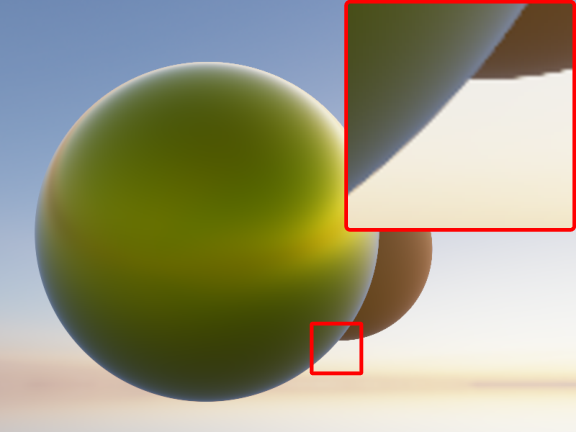
- Smooth “coverage” for anti-aliased edges: The system measures how much a layer’s surfels “cover” a pixel. More coverage means more opacity; less coverage means more see-through. At edges, coverage gradually changes from solid to transparent, so silhouettes look smooth (no jagged stair-steps) and, importantly, the learning signal remains useful at edges.
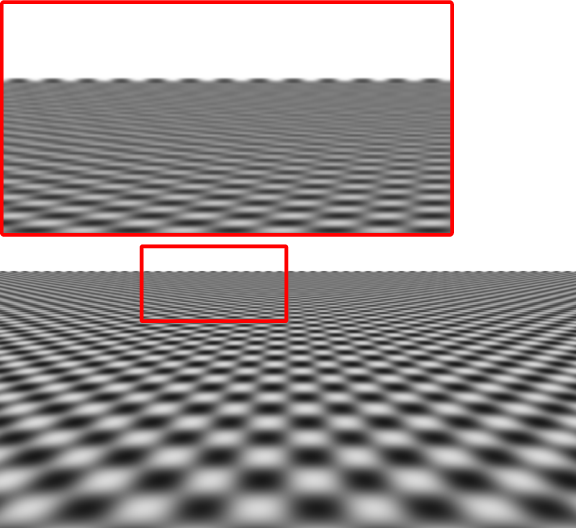
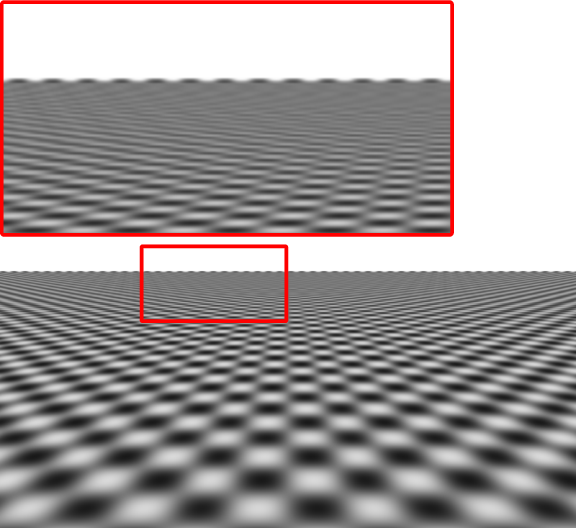
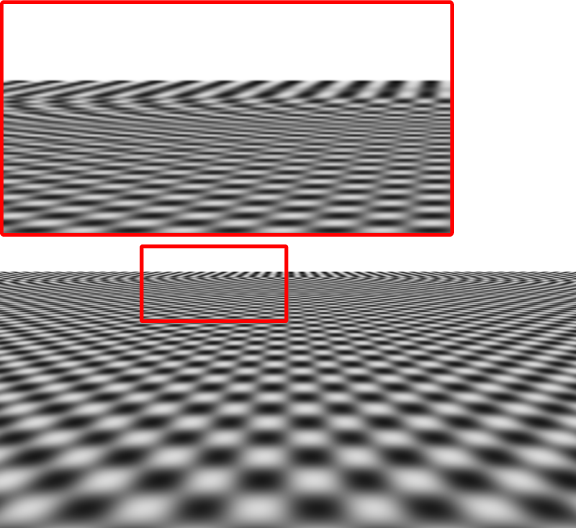
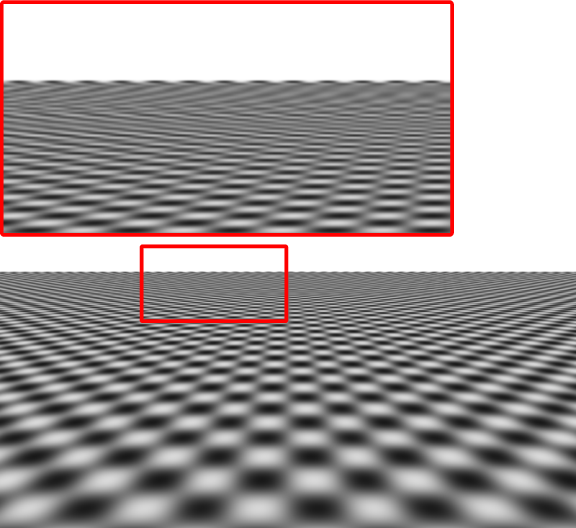
- Anti-aliasing that adapts with distance (MIP filtering): When you’re far away, many surfels squish into one pixel, which can cause flicker. 3DSS widens each surfel’s soft footprint just the right amount so the image stays stable and smooth. To keep it fast, it precomputes this widening once per surfel.
- Shade first, blend later: Each surfel is lit before any blending. Lighting uses a realistic model (microfacet shading) and an HDR environment map (a 360° light around the scene). The method even adjusts the environment lighting while learning, so shape, materials, and lighting all improve together. Shading first prevents weird averages of surface directions (normals) and materials that would be physically meaningless.
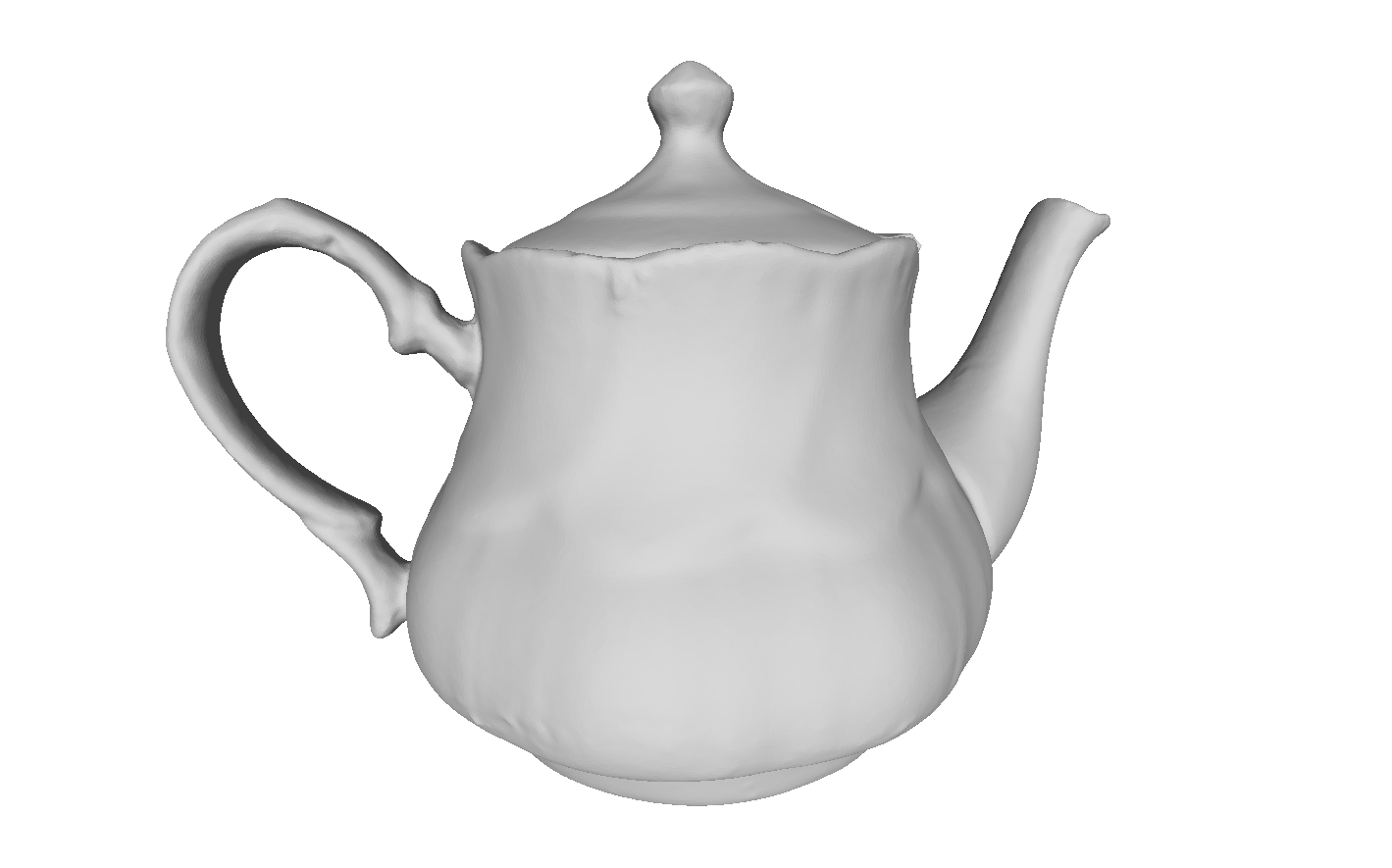
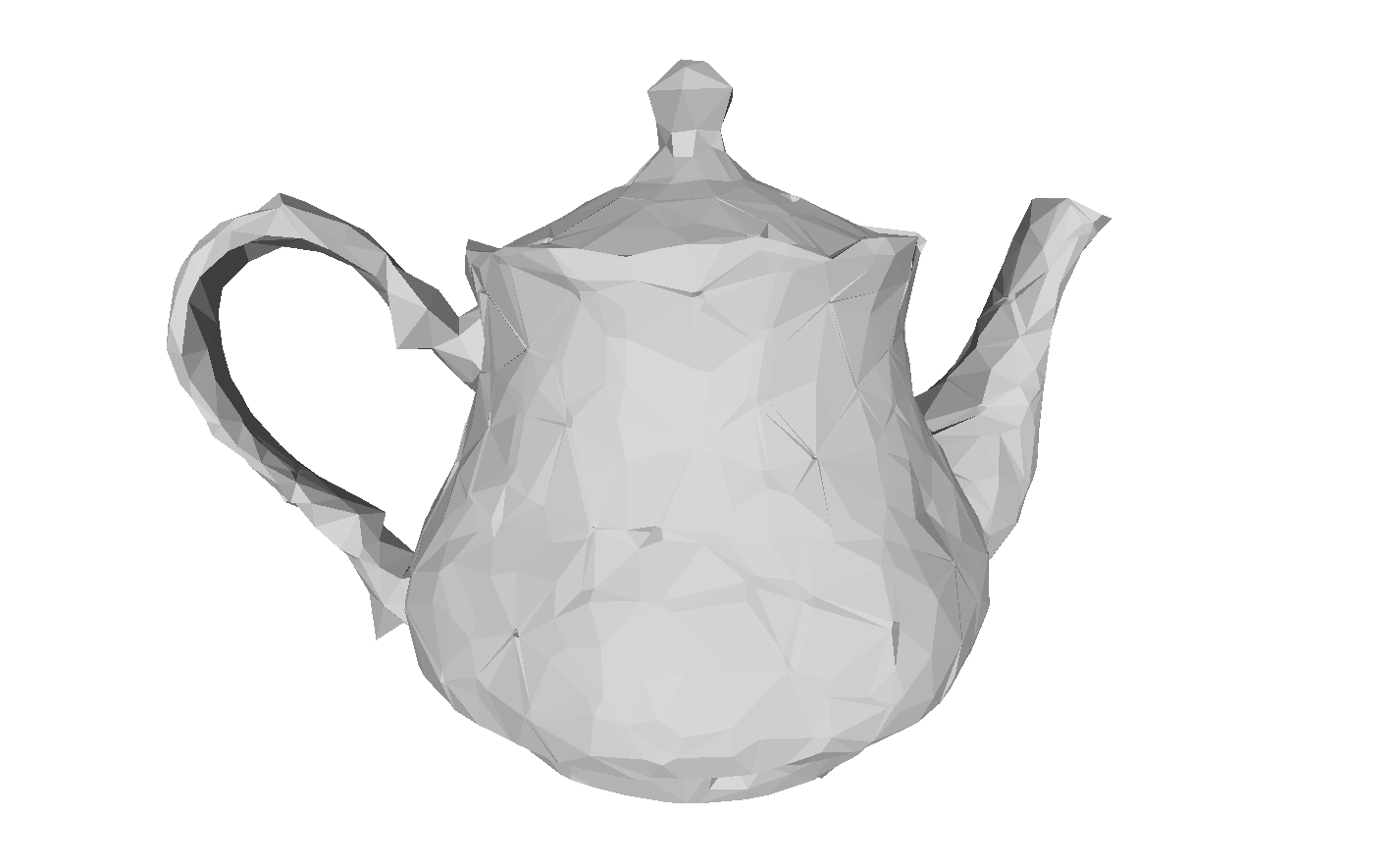
- Mesh-friendly outputs: Because the scene is a set of oriented surface samples (points-with-direction), you can convert them into a standard triangle mesh with existing tools. That means results work nicely with common 3D workflows used in games, film, and AR/VR.
What methods they used, step by step
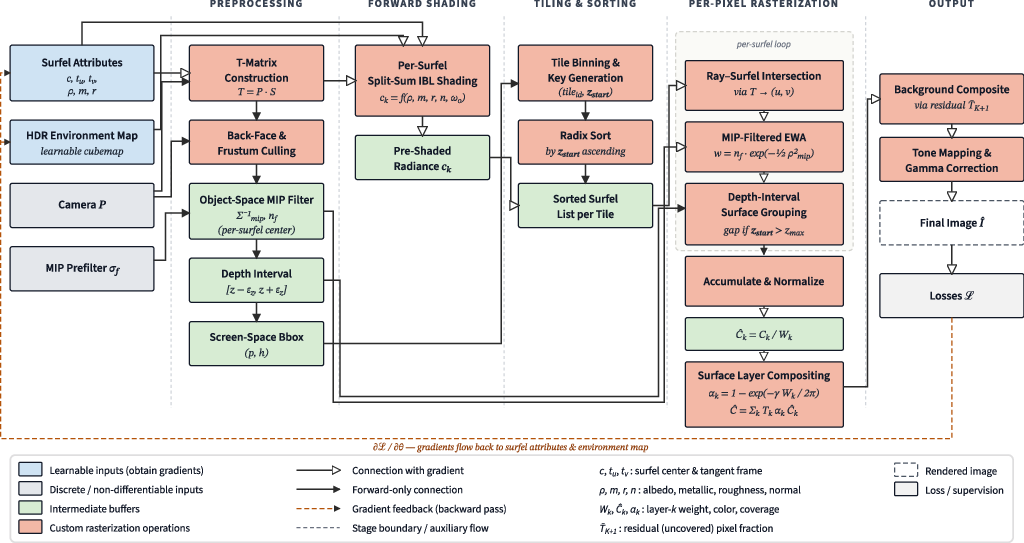
Here is a short, plain-language walkthrough of the pipeline:
- Start with surfels (those tiny disks) that guess the scene.
- For each camera view:
- Compute where each surfel projects and how it intersects a pixel ray (a stable math trick called a “T-matrix” helps do this accurately).
- Shade every surfel using realistic lighting so each one has a color it contributes.
- For each pixel, collect all surfels that might affect it and sort them by how close they start in depth.
- Group surfels into layers where their depth ranges overlap; if a gap appears, that’s a new deeper layer.
- Within each layer, blend surfels using soft, Gaussian-like weights, then normalize so the result is unbiased.
- Turn the total weight in a layer into a smooth “coverage” (opacity), so edges are clean and gradients are helpful.
- Composite layers from front to back using standard “over” blending, so foreground naturally covers background according to coverage.
- Compare the rendered image to the real photo, compute the difference, and nudge surfels and lighting to make the next render closer. Repeat many times.
Technical terms explained:
- Differentiable: Small changes in the 3D scene cause small, predictable changes in the image. This lets the computer figure out in which direction to change the 3D scene to reduce mistakes.
- Anti-aliasing: Tricks to avoid jaggies and flicker when details are smaller than a pixel.
- BRDF/material: A model of how a surface reflects light (color, metallic look, roughness).
- Environment map: A big image that surrounds the scene and provides realistic lighting from all directions.
Main findings and why they matter
- Clean surface separation at edges: By grouping surfels into depth-based layers and using coverage, 3DSS avoids mixing different surfaces. This produces crisp silhouettes and realistic occlusions, and gives strong “where to move” signals for learning at object boundaries.
- Physically meaningful materials: Because shading happens per surfel (before blending), the materials and normals keep their physical meaning. This is important for relighting and editing later.
- Good anti-aliasing without extra blur: The built-in, object-space anti-aliasing keeps images stable and sharp across distances, without adding ugly blur or guessy parameters.
- Works well across tasks: The authors evaluate 3DSS on standard benchmarks, comparing against mesh-based methods, neural implicit fields (like NeRF-style), and Gaussian splatting. They test shape reconstruction, making new views, and changing the lighting. The results support that 3DSS is accurate, produces high-quality images, and handles relighting, while being friendly to optimization.
- Easy to export: Since the optimized result is basically a high-quality oriented point cloud, it can be turned into a mesh for use in common 3D tools.
What this could change going forward
- Faster, cleaner inverse rendering: 3DSS shows that point-based surface splatting can be made fully differentiable and physically based. This gives researchers and artists a new tool to turn photos into editable 3D assets with realistic materials and lighting.
- Better edges and thin details: The multi-layer approach and coverage-based blending could improve many learning systems that struggle with occlusions and sharp silhouettes.
- Seamless pipelines: Because you can convert the final surfels into meshes, the method bridges cutting-edge learning techniques with traditional 3D workflows used in movies, games, product design, and AR/VR.
- More reliable relighting and editing: Physically meaningful materials and clear surface separation mean the recovered 3D assets can be re-lit, recolored, and edited without artifacts caused by mixing different surfaces.
In short, 3DSS combines the flexibility of point-based methods with the clarity of surface rendering, making it easier for computers to learn accurate 3D scenes from photos and produce results that are both beautiful and practical.
Knowledge Gaps
Knowledge gaps, limitations, and open questions
Below is a consolidated list of missing pieces, uncertainties, and unexplored aspects that future work could address.
- Differentiability of surface separation: The interval-merging step (layer creation at depth gaps) is a discrete operation. There is no theoretical or empirical analysis of gradient behavior at split/merge events (e.g., when crosses ), nor how gradients are defined when the sort order or group boundaries change during optimization.
- Sensitivity of depth-interval definition: The symmetric depth extent derived from tangent -components and the kernel cutoff is heuristic. It is unclear how over/under-estimation affects over-merging of distinct surfaces, false splits, or stability with highly tilted or thin surfels. Concrete guidance or adaptive rules for and are missing.
- Within-layer occlusion and topology: Once surfels are merged into a layer, there is no depth ordering inside the group. The method assumes a locally single-valued surface; self-occlusions, folds, and near self-intersections within a group can cause physically incorrect mixing. Conditions under which this assumption holds, and remedies when it fails, are not analyzed.
- Thin structures and closely spaced surfaces: When two surfaces are very close, overlapping intervals may cause unintended merging (bleeding across depth discontinuities smaller than the interval). Strategies to prevent or undo such merges (e.g., adaptive interval tightening, local connectivity cues) are not explored.
- “Arbitrary” number of layers in practice: Although the theory allows unbounded layers, GPU kernels typically need caps. Practical limits on per-pixel layer count, memory usage, and behavior under heavy multi-layer scenes (foliage, hair, complex occlusion) are not reported.
- Coverage-to-opacity mapping: The choice relies on a partition-of-unity assumption and on approximating at full coverage. With MIP filtering (view- and scale-dependent ) and irregular sampling, it is unclear how accurate this mapping remains, how sensitive results are to (fixed to ), and whether a data-driven or adaptive calibration would improve robustness.
- Enforcing partition-of-unity in practice: The paper references density-aware adaptive refinement but does not detail how sampling density is estimated, regulated, or enforced to keep . Failure modes under sparse or highly non-uniform sampling, and their effect on coverage gradients, are not documented.
- Averaging of pre-shaded radiance: Shading-before-reconstruction avoids non-linear attribute filtering, yet the EWA still averages pre-shaded radiance from surfels with potentially different normals and view directions. The extent to which this smears specular highlights or biases energy for glancing angles is not quantified; normal-distribution-aware filtering or BRDF-consistent integration remains unexplored.
- Lighting model limitations: Split-sum IBL ignores cast shadows, near-field lighting, and interreflections. The impact of missing shadowing/occlusion (e.g., environment visibility, contact shadows) on geometry/BRDF recovery and relighting realism is not assessed. Extending to differentiable soft shadowing or global illumination is left open.
- Illumination parameterization and ambiguity: Co-optimizing a single HDR environment with materials and geometry is ill-posed under typical data. There is no discussion of priors, multi-illumination capture, or constraints to resolve shape–BRDF–light ambiguities; robustness to real-world lighting is unclear.
- Materials and optics coverage: Only opaque microfacet BRDFs are supported. Handling of transmission, transparency, refraction, subsurface scattering, and anisotropic BRDFs (and how to integrate them with multi-layer compositing) is unaddressed.
- Camera and photometric calibration: Exposure, camera response, white balance, vignetting, and tone-mapping are not modeled end-to-end for inverse rendering. Sensitivity to these factors and integration of a differentiable camera model are open problems.
- Background and segmentation: The method can leverage silhouette masks, but its robustness when masks are unavailable or noisy, or when backgrounds are unknown and complex, is not evaluated. A principled treatment of background modeling is missing.
- Anti-aliasing approximation limits: The center-precomputed Jacobian MIP filter trades accuracy for speed. Error bounds, failure cases (e.g., extreme foreshortening, large surfels, strong anisotropy across the footprint), and guidance for choosing the pixel prefilter scale are not provided.
- Sorting and backpropagation through order statistics: Gradients through the per-tile sort by and through the discrete interval-merging logic are not discussed. How autodiff handles non-smooth events (ties, order flips) is unclear.
- Numerical robustness and culling: While the T-matrix formulation improves stability, the paper does not detail handling of grazing angles, backfacing surfels, or near-degenerate tangents, nor conditioning/regularization to prevent surfel collapse or extreme anisotropy during optimization.
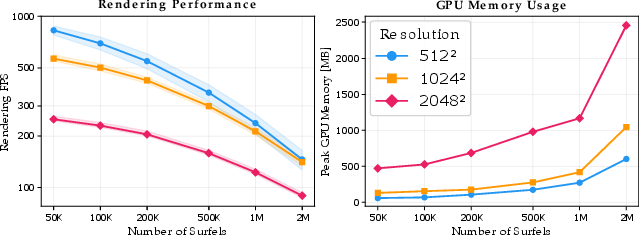
- Scalability and performance: There is no reported training/runtime comparison to 3DGS or mesh-based baselines, nor analysis of memory footprint (tile lists, per-surface accumulators), or scaling to large scenes and high resolutions.
- Initialization and regularization: The inverse-rendering setup lacks detail on how surfels are initialized (e.g., from SfM, depth priors), what geometric/material regularizers are used (e.g., Laplacian smoothness, normal consistency), and how these affect convergence and topology changes.
- Dataset and generalization: Evaluation appears limited to Stanford-ORB. Behavior on in-the-wild datasets with complex materials, backgrounds, and lighting is unknown; failure cases are not reported.
- Mesh bridging and texture baking: Converting oriented surfel sets to meshes is mentioned, but transferring SVBRDFs to a UV-parameterized mesh (texture baking, normal/roughness/albedo) and the fidelity of this transfer are not described.
- Novel-illumination relighting fidelity: With IBL-only shading and no shadowing/interreflections, the physical plausibility of relighting results is uncertain. Metrics and qualitative analysis under diverse novel environments are absent.
- Hyperparameter sensitivity: Key choices (kernel cutoff , coverage gain , tile size, pixel prefilter scale ) lack sensitivity analysis or principled selection rules; their impact on stability, quality, and gradients remains an open question.
- Backface and multi-object handling: The approach does not specify how to exclude backfacing contributions or separate co-projected objects with near-coplanar surfaces; potential cross-object blending at overlaps is not discussed.
- Dynamic/temporal extension: How to extend 3DSS to dynamic scenes, maintain temporal coherence of surfels/materials, and keep optimization tractable over time is unexplored.
- Hybridization with path tracing: Combining 3DSS’s raster efficiency with path-traced visibility for shadows/global illumination could address physical limitations; integration pathways and variance–bias trade-offs are open research directions.
Practical Applications
Immediate Applications
The following use cases can be deployed with existing multi-view capture pipelines and GPU compute, leveraging 3DSS’s differentiable surface splatting, multi-layer coverage-based compositing, and forward microfacet shading.
- Relightable asset creation from photos
- Sectors: VFX/games, e-commerce, AR/VR, digital twins
- What: Turn multi-view photographs of objects into relightable 3D assets with explicit geometry (via oriented surfels → mesh reconstruction), spatially-varying BRDFs, and HDR environment lighting.
- Workflow/product: “Turntable capture → camera calibration → 3DSS inverse rendering → Poisson mesh reconstruction → export to DCC/game engine” as a plugin for Blender/Unity/Unreal or as a photogrammetry add-on.
- Why 3DSS: Surface-based rendering and multi-layer compositing yield crisp silhouettes and correct material separation; forward shading avoids normal blending artifacts; direct bridge to mesh pipelines.
- Assumptions/dependencies: Calibrated multi-view images; materials approximated by microfacet PBR; primarily environment lighting (split-sum IBL); GPU memory for optimization; adequate view coverage and sampling density.
- High-quality photogrammetry enhancement
- Sectors: Cultural heritage, product design, CAD, education
- What: Replace texture back-projection with physically-based inverse rendering to recover SVBRDFs and handle view-dependent effects (specularities) more faithfully.
- Workflow/product: Integrate 3DSS into existing photogrammetry software to output both geometry and material maps; export to standard PBR formats.
- Assumptions/dependencies: Consistent lighting or an HDR environment that can be co-optimized; surfaces fit microfacet assumptions; robust camera poses from SfM.
- Material-aware 3D content pipelines for e-commerce
- Sectors: Retail, advertising
- What: Digitize products with accurate reflectance for realistic online previews and relighting (try-before-you-buy visuals).
- Workflow/product: Cloud service that ingests multi-angle product photos and returns a relightable asset for web viewers.
- Assumptions/dependencies: Controlled capture (turntable, light tent) improves stability; simple global illumination modeling (IBL) may miss cast shadows.
- Faster, surface-consistent differentiable rendering in research
- Sectors: Academia (graphics/vision/robotics)
- What: Use 3DSS as a training-time renderer for inverse graphics tasks that need informative visibility gradients and surface semantics without mesh connectivity constraints.
- Workflow/product: Open-source library integrated into PyTorch/JAX training loops; baselines for geometry/BRDF/lighting recovery and novel-view/relighting.
- Assumptions/dependencies: Batch GPU resources; stable autodiff; datasets with calibrated cameras.
- Asset relighting for post-production
- Sectors: VFX/advertising
- What: Extract environment lighting from multi-view shots alongside materials, enabling consistent relighting across scenes.
- Workflow/product: 3DSS-based relighting tool that co-optimizes an HDR environment map and per-object materials, then re-renders under target HDRIs.
- Assumptions/dependencies: IBL approximation (no full global illumination); needs good coverage and minimal interreflections/self-shadows for best fidelity.
- Anti-aliased surface rendering of point-sampled meshes
- Sectors: Real-time visualization, CAD review
- What: Render point-sampled (or mesh-converted) assets with anti-aliased silhouettes and coverage-aware edges using 3DSS’s multi-layer compositing.
- Workflow/product: Renderer plugin that consumes oriented point clouds and produces high-quality previews without mesh connectivity.
- Assumptions/dependencies: Offline or near-realtime GPU rasterization; pre-sampled or converted meshes.
- Robust silhouette supervision for reconstruction tasks
- Sectors: Vision/graphics research
- What: Use 3DSS’s differentiable coverage (per-layer alpha from accumulated EWA weight) to supply stable silhouette losses in multi-object scenes.
- Workflow/product: Training modules for silhouette-constrained geometry optimization that avoid brittle binary masks.
- Assumptions/dependencies: Ground-truth masks optional but helpful; tuning of coverage gain γ is minimal (defaults work under partition-of-unity sampling).
- Dataset generation and benchmarking for inverse rendering
- Sectors: Academia, tool vendors
- What: Produce controlled relightable datasets with per-pixel normals/BRDF/illumination estimates; benchmark against mesh/NeRF/3DGS.
- Workflow/product: Public benchmarks and synthetic-to-real evaluation suites including 3DSS outputs.
- Assumptions/dependencies: Reproducible pipelines; standardized evaluation metrics.
Long-Term Applications
These opportunities require further research, scaling, or engineering—e.g., real-time performance, richer light transport, mobile capture, or hardware support.
- Real-time, on-device capture to relightable asset
- Sectors: AR/VR, mobile 3D scanning, social media
- What: Scan objects with a phone and instantly get a relightable, editable asset.
- Tools/workflows: Mobile 3DSS with GPU/Neural Engine acceleration; incremental optimization; automatic camera calibration.
- Dependencies/assumptions: Edge acceleration (Metal/Vulkan); fast interval-merging and multi-layer compositing kernels; robust handling of motion blur and rolling shutter.
- Game-engine integration for surface-splat-based rendering
- Sectors: Games, real-time engines
- What: Native support for 3DSS-style surface splats as a first-class primitive with PBR shading and multi-layer compositing.
- Tools/workflows: Unity/Unreal renderer backend; importers for surfel sets; runtime adapters to mesh when needed.
- Dependencies/assumptions: Engine-level A-buffer/multi-layer per-pixel storage; GPU features for interval merging; hybrid with raster/path tracing.
- Sim-to-real bridging via material-accurate assets
- Sectors: Robotics, autonomous systems, digital twins
- What: Build simulation environments with materials captured from the real world to reduce domain gap for perception/control.
- Tools/workflows: 3DSS-based capture → mesh/BRDF export → robot simulators (Isaac, Gazebo) with physically-based lighting.
- Dependencies/assumptions: Extend beyond IBL to include area lights/shadows; scalable capture pipelines for large scenes; temporal stability for dynamic objects.
- Large-scale scene capture with global illumination
- Sectors: AEC (architecture/engineering/construction), mapping
- What: City-scale or building-scale capture with consistent materials and lighting decomposition that accounts for indirect light.
- Tools/workflows: 3DSS coupled with differentiable path tracing or learned GI approximations; block-wise optimization with global consistency constraints.
- Dependencies/assumptions: Significant compute; accurate exposure/white balance handling; joint optimization over multiple light sources and interreflections.
- Standards and compliance for relightable 3D product assets
- Sectors: Policy/regulation, retail
- What: Define interchange and disclosure standards for BRDF-calibrated product models used in online commerce (accuracy thresholds, provenance).
- Tools/workflows: Validation suites; metadata schemas (e.g., glTF extensions for measured SVBRDF and HDR lighting provenance).
- Dependencies/assumptions: Industry consortiums; consumer protection guidelines; reproducibility protocols.
- Hardware acceleration for multi-layer surface splatting
- Sectors: Semiconductors, GPUs, ISPs
- What: Dedicated raster ops for interval-merging, per-pixel layered compositing, and object-space MIP filtering.
- Tools/workflows: Graphics API extensions; driver-level support for coverage-derived compositing; surfel-native pipelines.
- Dependencies/assumptions: Vendor adoption; standardized kernel representations; performance justifying silicon cost.
- Photo-realistic telepresence and volumetric video
- Sectors: Communications, XR
- What: Capture participants as relightable surface-based avatars with accurate materials and anti-aliased silhouettes, compatible with dynamic lighting.
- Tools/workflows: Multi-camera rigs → 3DSS reconstruction per frame → temporal consistency and streaming.
- Dependencies/assumptions: Real-time temporal optimization; learning-based priors for stability; motion/deformation handling.
- Industrial metrology with reflectance-aware inspection
- Sectors: Manufacturing, QA
- What: Jointly recover shape and surface finish (roughness/metallicity) to detect defects invisible to purely geometric scans.
- Tools/workflows: Controlled-light capture booths; 3DSS inverse rendering; automated pass/fail criteria on BRDF/geometry deviations.
- Dependencies/assumptions: Calibrated illumination; high SNR imagery; extension to detect sub-surface effects and anisotropy.
- Privacy, authenticity, and provenance for reconstructed assets
- Sectors: Policy, cybersecurity, media integrity
- What: Watermarking and provenance tracking for relightable assets derived from photos; disclosure requirements for digitally relit imagery.
- Tools/workflows: Embedded metadata pipelines; audit trails linking source imagery, optimization settings, and outputs.
- Dependencies/assumptions: Policy frameworks; interoperable metadata standards; legal alignment across jurisdictions.
- Hybrid neural/analytic pipelines
- Sectors: Software, research
- What: Combine 3DSS surface splats with neural implicit fields (NeRF/3DGS) for complex lighting/volumes while preserving surface-level BRDFs.
- Tools/workflows: Dual-representation training loops; cross-regularization (surface normals/coverage with volumetric radiance).
- Dependencies/assumptions: Differentiable coupling of representations; efficient training; consistent supervision across modalities.
Glossary
- 2D Gaussian Splatting (2DGS): A splatting framework that renders oriented planar disks (2D Gaussians) with volumetric compositing. Example: "2D Gaussian Splatting (2DGS)~\cite{huang20242d} collapses the 3D volumetric primitive into oriented planar disks"
- 3D Gaussian Splatting (3DGS): A real-time scene representation using anisotropic 3D Gaussians rendered by sorted alpha compositing. Example: "3D Gaussian Splatting (3DGS)~\cite{kerbl2023gaussian} represents scenes as anisotropic 3D Gaussians with per-primitive learnable opacity, rendered via differentiable alpha compositing sorted by center depth."
- A-buffer: A per-pixel fragment storage technique enabling order-independent transparency and edge anti-aliasing. Example: "Transparency and edge anti-aliasing were handled through a modified A-buffer~\cite{carpenter1984abuffer} that stores multiple fragments per pixel and composites them after all splats have been emitted."
- AA-2DGS: An anti-aliased 2D Gaussian splatting method using an object-space MIP filter derived via the intersection Jacobian. Example: "AA-2DGS~\cite{younes2025anti} formulates an object-space MIP filter in the tangent frame of the 2D splat by mapping the pixel prefilter into the local coordinate system via the Jacobian of the ray--splat intersection."
- alpha compositing: Layered blending using per-primitive opacity to accumulate color along a view direction. Example: "rendered via differentiable alpha compositing sorted by center depth."
- anti-aliasing: Techniques to suppress jagged edges and sampling artifacts by appropriate filtering or coverage modeling. Example: "provides visibility gradients through an analytic post-process antialiasing pass"
- BRDF: The bidirectional reflectance distribution function describing how light reflects at a surface. Example: "a precomputed BRDF integration look-up table"
- clip space: The homogeneous coordinate space after projection used for clipping and rasterization. Example: "into clip space, introduced by Weyrich et al.~\shortcite{weyrich2007hardware}"
- coverage opacity: A continuous opacity derived from how much a surface layer covers a pixel, used for compositing. Example: "We convert to a per-layer coverage opacity"
- DIB-R: A differentiable renderer that uses a soft alpha channel derived from triangle edge distances. Example: "DIB-R~\cite{chen2019learning} produces a separate soft alpha channel derived from the distance to triangle edges"
- differentiable path tracers: Monte Carlo renderers with gradient estimation through visibility and light transport for inverse problems. Example: "differentiable path tracers~\cite{li2018differentiable,loubet2019reparameterizing,bangaru2020unbiased,nimier2019mitsuba} handle visibility discontinuities through Monte Carlo edge sampling, reparameterization of the integration domain, or warp fields"
- differentiable rendering: Rendering pipelines designed to provide gradients of images with respect to scene parameters. Example: "Today's differentiable rendering landscape is dominated by two paradigms with complementary strengths and weaknesses."
- DMTet: A differentiable tetrahedral grid representation enabling volumetric shape extraction. Example: "when coupled with a differentiable volumetric shape extraction such as DMTet~\cite{shen2021deep}"
- Elliptical Weighted Average (EWA): A Gaussian-based resampling filter adapted for irregular point samples in surface splatting. Example: "In its Elliptical Weighted Average (EWA) formulation, an unstructured set of oriented surfels (surface elements), each carrying a Gaussian reconstruction kernel in its local tangent plane, reconstructs a continuous, band-limited surface signal"
- extended z-buffering: A ternary depth test that uses a threshold to decide surface membership in splatting. Example: "a ternary test commonly referred to as extended z-buffering~\cite{krivanek2003representing}"
- forward shading: Evaluating shading per sample before any blending or reconstruction, avoiding deferred G-buffers. Example: "Our forward shading paradigm evaluates the shading function at the sample level before any blending occurs"
- Fresnel: Angle-dependent reflectance effect at interfaces between media. Example: "a dielectric Fresnel reflectance of~$0.04$"
- G-buffers: Per-pixel geometry/material buffers used for deferred shading. Example: "avoids the need to store per-layer G-buffers for deferred shading."
- Gaussian reconstruction kernel: A Gaussian weight function attached to each surfel used to reconstruct surface signals. Example: "each surfel carries a Gaussian reconstruction kernel in its local tangent plane"
- HDR environment lighting: High dynamic range image-based lighting used to illuminate scenes. Example: "Combined with forward microfacet shading under co-optimized HDR environment lighting"
- image-based lighting (IBL): Lighting using panoramic environment maps instead of explicit light sources. Example: "we employ an image-based lighting (IBL) model using the split-sum approximation"
- Jacobian: The derivative matrix mapping screen-space pixel coordinates to local surfel coordinates for filter footprint. Example: "via the Jacobian of the ray--splat intersection."
- microfacet shading: A physically-based model where surfaces are composed of microfacets determining specular reflection. Example: "Combined with forward microfacet shading under co-optimized HDR environment lighting"
- MIP filter: A multiscale prefiltering method to band-limit signals and suppress sampling aliasing. Example: "An efficient object-space MIP filter that exploits the resampling structure of surface splatting to suppress sampling aliasing."
- Monte Carlo edge sampling: Stochastic technique to handle visibility discontinuities by sampling silhouette contributions. Example: "handle visibility discontinuities through Monte Carlo edge sampling"
- Neural Radiance Field (NeRF): A continuous volumetric scene model parameterized by neural networks. Example: "Neural Radiance Field (NeRF)~\cite{mildenhall2021nerf} represents scenes as continuous volumetric radiance fields parameterized by MLPs"
- nvdiffrast: A modular differentiable rasterizer providing image-accurate forward renderings and visibility gradients. Example: "nvdiffrast~\cite{laine2020modular} preserves a crisp forward image and provides visibility gradients through an analytic post-process antialiasing pass"
- Nyquist–Shannon theorem: Sampling theorem that sets the bandwidth limit to avoid aliasing. Example: "suppressing the sampling artifacts predicted by the Nyquist--Shannon theorem."
- over operator: The standard front-to-back alpha compositing operator for layering. Example: "composite layers front-to-back via the over operator~\cite{porter1984compositing}"
- partition of unity: A property where basis weights sum to one, ensuring unbiased reconstruction. Example: "the accumulated kernel contributions do not form a partition of unity"
- perspective-correct ray--splat intersection: An object-space intersection calculation accounting for perspective projection. Example: "employs perspective-correct ray--splat intersection in the same object-space formulation"
- physically-based inverse rendering: Estimating shape, materials, and lighting from images using physically-accurate models. Example: "the first differentiable surface splatting renderer for physically-based inverse rendering from multi-view images."
- Screened Poisson Surface Reconstruction: A method to reconstruct watertight surfaces from oriented point clouds. Example: "Screened Poisson Surface Reconstruction~\cite{kazhdan2013screened}"
- Shepard normalization: Weight normalization dividing by total accumulated weight to counter irregular sampling. Example: "Shepard normalization~\cite{shepard1968two} compensates by dividing by the total weight."
- signed distance functions: Implicit surface representations encoding distance to the nearest surface. Example: "signed distance functions~\cite{yariv2020multiview,wang2021neus,yariv2021volume}"
- soft silhouette mask: A differentiable mask expressing fractional pixel coverage at object boundaries. Example: "serves as a differentiable soft silhouette mask for the rendered object."
- SoftRasterizer: A differentiable rasterizer using probabilistic coverage to smooth visibility. Example: "SoftRasterizer~\cite{liu2019soft} replaces hard triangle coverage with a probabilistic formulation"
- split-sum IBL: An efficient approximation of microfacet BRDF lighting using preintegrated environment maps. Example: "using the split-sum approximation~\cite{karis2013real, Munkberg_2022_CVPR}"
- surfel: An oriented, locally parameterized surface element used as a rendering primitive. Example: "Each surfel is an oriented, opaque surface sample carrying physically-based material attributes"
- surface splatting: Rendering technique that reconstructs surfaces by accumulating contributions from point-based kernels. Example: "Surface splatting combines the connectivity-free flexibility of point-based methods with the explicit surface semantics of mesh rasterization"
- T-matrix: A 4×4 mapping that transforms a surfel’s local parameterization into clip space for stable intersection and bounds. Example: "The T-matrix is defined as "
- tile-based binning: Grouping primitives into screen tiles to accelerate per-pixel processing. Example: "Surfels are binned into screen-space tiles and radix-sorted by the depth-interval start"
- transmittance: The residual fraction of light/pixel area not yet covered or absorbed by previous layers. Example: "The resulting renderer is surface-based by construction, anti-aliased at silhouettes, and continuously differentiable through visibility." [Used explicitly as] "The layers are composited front-to-back by accumulating their contributions through the residual fraction of the pixel not yet covered by preceding layers: "
- volume rendering: Integrating radiance along rays through a participating medium or volumetric field. Example: "Neural Radiance Field (NeRF)~\cite{mildenhall2021nerf} represents scenes as continuous volumetric radiance fields parameterized by MLPs, queried along camera rays and composited via volume rendering."
- volumetric ray-marching: Sampling and integrating volumetric properties along a ray at discrete steps. Example: "inherit the computational cost of volumetric ray-marching"
- warp fields: Mappings used to reparameterize integrals or domains for stable gradient estimation in differentiable rendering. Example: "handle visibility discontinuities through Monte Carlo edge sampling, reparameterization of the integration domain, or warp fields"
Collections
Sign up for free to add this paper to one or more collections.