- The paper introduces a novel Battery-Efficient Routing (BER) framework that integrates hierarchical task allocation, online energy-aware route planning, and decentralized deep reinforcement learning for UAV delivery.
- It employs wind-sensitive kinematic modeling and a time-dependent risk-aware energy graph to optimize UAV trajectories under dynamic wind uncertainties.
- Empirical results demonstrate BER's superior robustness and significantly lower mission failure rates compared to static and myopic baseline routing methods.
Robust Energy-Aware Routing for Air-Ground Cooperative Multi-UAV Delivery in Wind-Uncertain Environments
Problem Statement and Motivation
The paper addresses energy-aware routing for multi-UAV delivery systems operating cooperatively with ground vehicles (trucks) in the presence of uncertain, heterogeneous, and time-varying wind fields. The significance stems from the operational constraints of UAVs due to limited battery capacity and susceptibility to exogenous wind disturbances, which can drastically affect energy feasibility and delivery safety. The rationale for coupling UAVs with mobile ground depots (trucks) is primarily to extend the effective range, but this does not remove the core challenge of ensuring safe return under dynamically varying, partially observable wind fields. The work identifies that most existing routing and delivery planning schemes are predicated on static or deterministic environmental models, resulting in unreliable performance when deployed under realistic urban wind conditions.
The presented framework decomposes the joint routing and scheduling problem for truck-assisted multi-UAV delivery into a hierarchical architecture with three layers: system-level task allocation and clustering, energy-aware route planning, and decentralized trajectory optimization via deep multi-agent reinforcement learning (MADDPG). The system models the urban delivery environment as a time-dependent energy graph, with edge costs evolving according to locally observable wind fields.
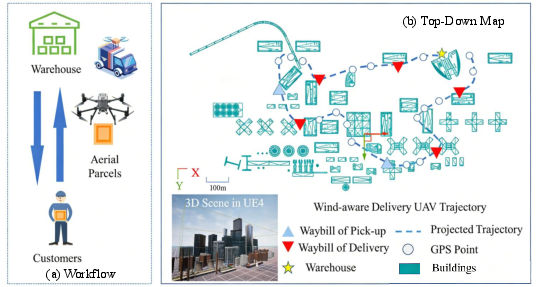
Figure 1: Wind-sensitive energy-efficient routing and stage-wise energy allocation under dynamic flow conditions.
Wind-Sensitive Kinematic and Energy Modeling
A Dubins path model with air-relative kinematic constraints underlies the route generation, integrating the explicit wind triangle to capture deviations between ground-relative and air-relative dynamics. The planner accounts for the infeasibility conditions imposed by high lateral wind components, path orientation with respect to wind, and the physical bounds of UAV maneuverability. The energy model is derived under small-angle equilibrium assumptions, incorporating both aerodynamic drag and gravitational effects as parametrized by the wind-relative flight path.
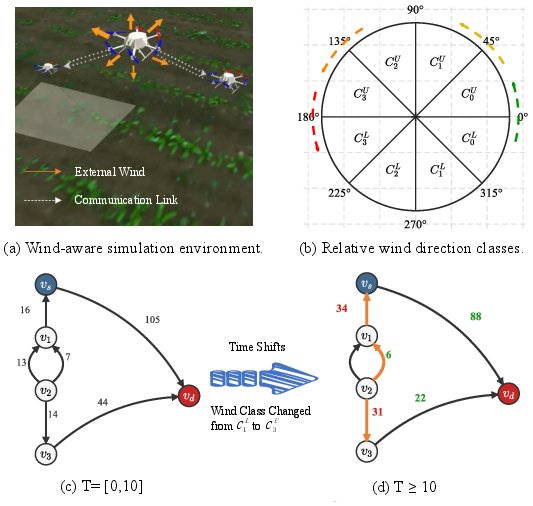
Figure 2: Wind-sensitive modeling and time-dependent edge weight variation.
Time-Dependent Risk-Aware Energy Graph
The core abstraction is a dynamic graph where each edge's synthetic energy cost is given by the sum of geometric and wind-induced components. A risk sensitivity parameter λ allows explicit modulation of the trade-off between instantaneous energy minimization and robustness to wind-induced uncertainty.
Hierarchical Planning Framework
The first architectural layer leverages a lightweight LLM-based clustering and assignment scheme for decomposing the delivery map into energy- and wind-coherent subregions, partitioning customer sets into those best served by truck or drone assets.
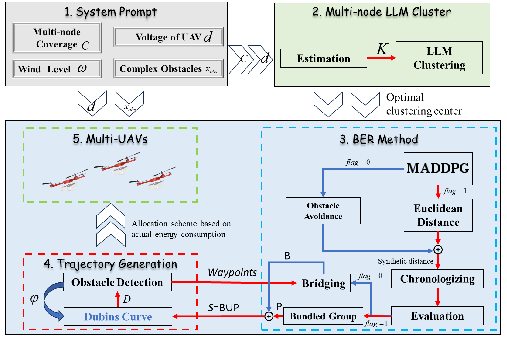
Figure 3: Overview of the proposed framework. System-level constraints (coverage, wind level, battery voltage, and obstacle complexity) condition multi-node LLM clustering.
The routing layer, embodied in the Battery-Efficient Routing (BER) module, conducts online path selection with return-feasibility constraints. This ensures every UAV action preserves the residual budget required for a safe return despite partial observability and nonstationarity of the wind field. Among candidate trajectories, those failing conservative feasibility checks (accounting for a tunable safety margin) are pruned.
Decentralized trajectory execution is delegated to MADDPG-based agents operating in a partially observable Markov Decision Process (POMDP) formulation, with structured reward signals penalizing energy usage, suboptimal timing, obstacle and inter-UAV collisions, and infeasibility events.
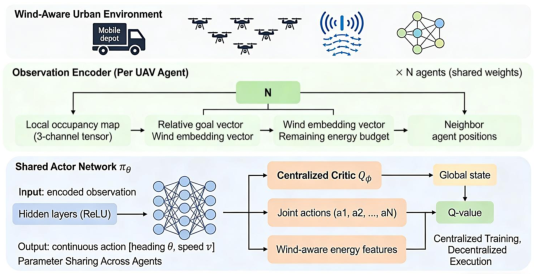
Figure 4: Neural network architecture of the MADDPG model.
Trajectory Optimization
Discrete routes are post-processed via Dubins curve generation to ensure physical realizability, heading continuity, and efficient energy consumption while respecting minimum turning constraints.
Baselines and Comparative Evaluation
The work benchmarks BER against three canonical approaches:
- SER: Static Energy-Optimal Routing assuming wind fields are constant and globally known.
- RER: Online Replanning with Updated Edge Costs, recomputing routes at every step under updated local wind estimates.
- GER: Greedy Energy-Minimizing Routing, minimizing only immediate energy cost without regard for mission-level feasibility or return constraints.
All methods are evaluated across synthetic Erdős–Rényi (ER) graphs with high-fidelity wind simulation and with quasi-realistic wind logs to capture environmental variability.
Experimental Results and Empirical Insights
Energy Consumption Under Wind and Payload Variance
Energy cost per flight distance varies non-monotonically with respect to both wind intensity/direction and payload mass, with the existence of an optimal speed minimizing energy-for-distance under each condition. Headwinds substantially increase energy requirements, whereas tailwinds afford modest savings. Payload further exacerbates headwind penalties.
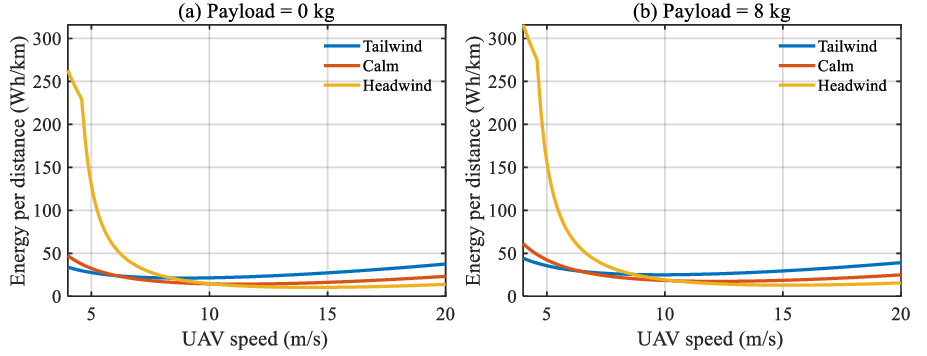
Figure 5: Energy per distance (Wh/km) as a function of UAV speed under different wind conditions and payload states.
Routing Strategy Robustness
BER consistently outperforms all baseline methods across risk sensitivities (λ values) and battery budget levels. Its stability manifests as lower mission failure and abort rates, particularly as energy reserves become restrictive and wind field discretization increases in granularity. Notably, GER's purely myopic strategy leads to pathological failure rates under wind uncertainty, and the gap between BER and both SER and RER widens as environmental volatility increases. The route planning advantage becomes pronounced under low budget (e.g., B=50), with success rate differentials exceeding 9%.
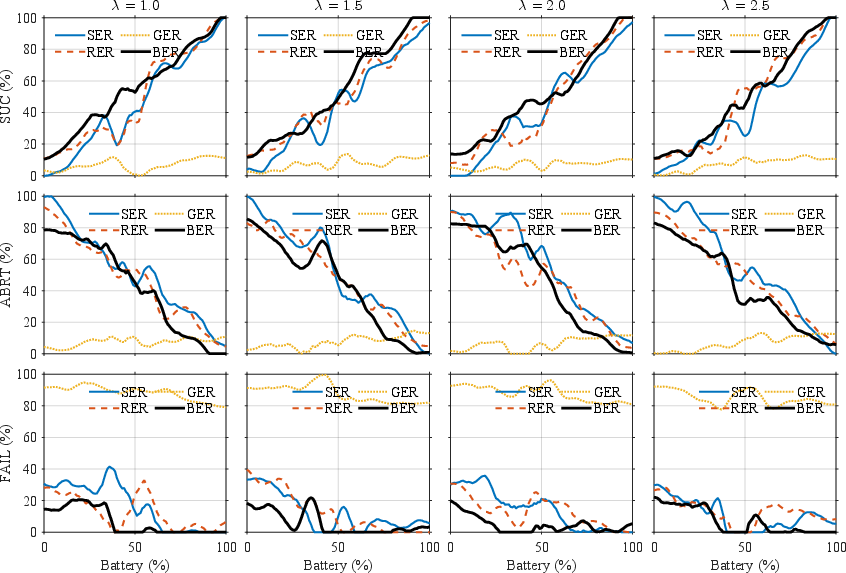
Figure 6: Comparative performance of SER, RER, GER, and BER under varying risk sensitivity (λ).
Ablation studies further reveal that the elimination of the Budget Gate (feasibility-aware constraint) is most detrimental, while neglecting wind costs or uncertainty penalization likewise degrades robustness. The difference in performance between LLM-based and K-Means clustering modules is measurable but secondary to the role of online feasibility checks and wind sensitivity.
Practical and Theoretical Implications
This research confirms that incorporating explicit residual energy constraints and risk-aware, wind-sensitive energy modeling is essential for reliable UAV delivery under real, stochastic wind fields. The practical implication is that static route optimization or reactive greedy schemes are inadequate—even dangerous—under conditions of uncertainty, and online feasibility validation should be considered mandatory in system design.
From a theoretical perspective, the work frames UAV delivery as a risk-aware eMMP (energy-constrained Multiagent Motion Planning) problem on dynamic, partially observable graphs. It highlights the NP-hardness of centralized planning in these settings and the effectiveness of hierarchical decomposition paired with deep, decentralized controllers for real-time adaptation.
Limitations and Future Directions
Current evaluations are performed in high-fidelity simulation environments with limited wind class discretization, which may not fully capture turbulent, fine-grained wind structures encountered in dense urban environments. The impact of real-world wind turbulence or sudden extreme events may still be underestimated. Future work should investigate scalable planning under continuous high-dimensional wind estimation, the use of more expressive graph neural planners, and experimental validation with physical UAV-truck systems in outdoor trials.
Conclusion
The BER framework sets a new standard for energy-aware UAV delivery routing under wind uncertainty by formalizing time-dependent energy graphs, embedding real-time environmental perception within the routing layer, and enforcing conservative feasibility-aware mission planning. The empirical results unambiguously demonstrate superior robustness and reliability compared to static or greedy path planners. This work underscores the necessity of environmental awareness and ongoing feasibility assessment in next-generation aerial logistics systems and provides a foundation for further research on risk-sensitive planning in adversarial, partially observable domains.

