- The paper presents a probabilistic planning framework that minimizes mission failure by modeling travel times as random variables and enforcing a joint chance constraint.
- It integrates offline optimization with receding horizon online re-planning to dynamically adjust UAV tours and UGV recharging, balancing energy constraints with mission safety.
- Empirical results confirm polynomial-time feasibility and superior performance over baselines, enhancing risk-aware, energy-efficient coordinated missions.
PRO-SPECT: Probabilistically Safe Scalable Planning for Energy-Aware Coordinated UAV-UGV Teams in Stochastic Environments
Introduction
The paper introduces PRO-SPECT, a scalable, risk-bounded planning framework for coordinated UAV-UGV missions with energy constraints in stochastic environments (2604.02142). UAVs are tasked with visiting aerial waypoints and rely on mobile UGVs for recharging, minimizing mission completion time while satisfying a user-defined constraint on global mission failure probability. Unlike prior approaches that assume deterministic energy budgets or fixed robustness margins, PRO-SPECT explicitly models travel times as random variables and imposes a joint chance constraint, ensuring the probability of UAV energy depletion does not exceed a pre-specified risk threshold.
The mission is formalized as a Mixed-Integer Program (MIP) encompassing the stochastic dynamics of UAV-UGV teams. The UAV must visit all points in a set PUAV within its energy limitations, requiring strategic rendezvous with the UGV (serving as a mobile charging station). Travel times τa (UAV) and τg (UGV) between waypoints are modeled probabilistically, with environment-induced disturbances (e.g., wind, obstacles) affecting their distributions. The key innovation lies in the joint chance constraint:
P(∀ tours, max[τa,τg]≤τˉa)≥1−pr
pr is a user-defined upper bound on acceptable global mission failure, not just per-tour or per-segment probability.
Algorithmic Framework
PRO-SPECT operates in both offline and online modalities. Offline, it computes a risk-bounded mission plan, and online, it adapts via receding horizon re-planning to maintain safety guarantees under dynamically observed disturbances.
Environmental Modeling
Travel time statistics (means, variances, covariances) are obtained for each trajectory segment and used to construct Gaussian surrogates. This enables calculation of conservative upper bounds on the probability of constraint violation via the Gaussian CDF, facilitating tractable risk assessment even when the true distribution is non-Gaussian.
Tour Construction and Dynamic Programming
Tour construction must account for the coupling induced by the joint chance constraint: all tours are constrained together, not in isolation. The algorithm first fixes the visitation order using TSP/ATSP on PUAV, leveraging the edge cost structure from the environment model. Dynamic programming partitions the sequence into tours, jointly optimizing for release/collect points and maximizing the product of per-tour probabilities (equivalent to maximizing the sum of log probabilities). The minimal number of tours satisfying the global chance constraint is found via iterative DP recursion.
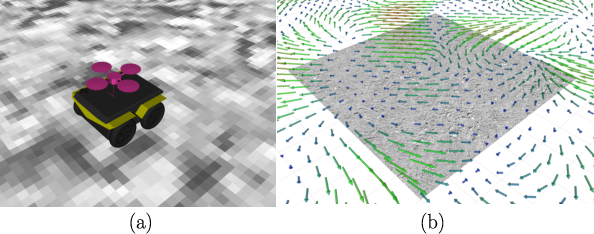
Figure 1: UAV-UGV simulation setup and wind field for stochastic environmental modeling.
Offline and Online Modes
Offline planning assumes full battery and co-located start; online re-planning operates at tour boundaries or dynamically during execution, updating the risk budget to preserve global guarantees. The re-planner considers the residual energy and adapts the tour partitioning and waypoint selection accordingly.
Computational Complexity
PRO-SPECT is shown formally to yield feasible solutions to the MIP in polynomial time O(n5), where n is the number of UAV waypoints, a significant improvement over brute-force or combinatorial exact methods.
Numerical Evaluation
Extensive numerical comparisons demonstrate scalability and performance:
- For n≤100, PRO-SPECT exhibits empirical computation times consistent with polynomial growth, significantly outperforming Branch and Cut and Simulated Annealing, which are either exponential or unreliable for larger n.
- Mission times are competitive or superior across baselines, especially as τa0 increases (Table results), owing to the concurrent movement of the UGV and UAV and risk-aware plan partitioning.
PRO-SPECT was empirically validated to maintain mean empirical failure rate τa1 just below the user-specified τa2 across all scenarios, substantiating the correctness of the risk bound approximation.
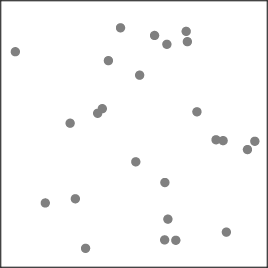
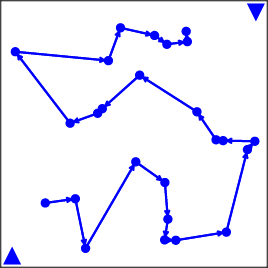
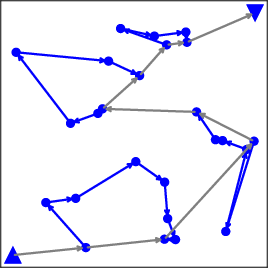
Figure 2: Tour partitioning using TSP-based visit order and concurrent UAV-UGV path planning.
Comparative Results with Baseline Algorithms
- Branch and Cut: PRO-SPECT achieves near-optimal mission times with orders-of-magnitude lower computation cost for moderate τa3.
- Simulated Annealing: PRO-SPECT yields consistently tighter bounds and lower mission times across all trials.
- TERRA: TERRA's deterministic planning is outperformed in both mission time and failure rate; its rendezvous strategy results in excessive idling and brittle plans under stochastic disturbances.
- RSPECT: While RSPECT's deterministic margin-based robustness helps at low risk levels, it utterly fails to bound mission failure probability as required, especially at high τa4; PRO-SPECT directly adapts tour count to meet the chance constraint, outperforming RSPECT as τa5 or τa6 increases.
Simulation Studies
Simulations in ROS2 environments with Perlin-noise wind fields confirm operational reliability of PRO-SPECT under realistic disturbance profiles. Empirical mission times are closely matched to planned values, validating the effectiveness of the Gaussian surrogate approach for probabilistic constraint evaluation. Online re-planning incurs negligible computation overhead, successfully restoring feasibility in all runs.
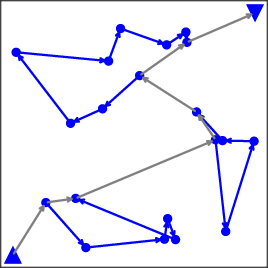
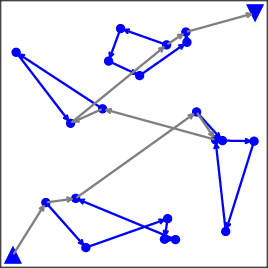
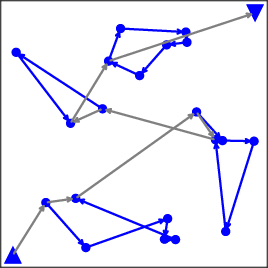
Figure 3: Initialization of the mission plan, with UAV-UGV agents co-located at τa7.
Theoretical and Practical Implications
PRO-SPECT addresses energy-aware coordinated multi-agent planning by tightly integrating stochastic environmental modeling with scalable risk-bounded algorithmics. By shifting from deterministic margins to joint chance constraints, the framework accurately and efficiently allocates tours to meet mission-level safety specifications. Practically, this enables robust deployment of UAV-UGV teams in dynamic environments, improves utilization of agent mobility, and offers flexibility in risk-budget allocation, adaptable in real-time. Theoretical guarantees in complexity and feasibility position PRO-SPECT as the current gold standard for stochastic energy-aware UAV-UGV planning.
Future Directions
Several extension avenues emerge:
- Multi-UAV coordination incorporating mutual rendezvous and mobile recharging
- Integration of more intricate planning specifications (temporal logic, spatial-temporal constraints)
- Inclusion of richer environmental disturbance models and real-time learning of travel time statistics
- Advanced parallelization, further scaling the tour construction component for massive environments
Conclusion
PRO-SPECT provides a rigorous, scalable, and risk-aware methodology for coordinated UAV-UGV planning in stochastic environments, addressing both mission efficacy and energy safety. Its joint chance constraint formalism, dynamic program-based algorithmics, and robustness under disturbance position it as an essential tool for future autonomous multi-agent operations in uncertain domains. Empirical results show strong improvements in mission safety and efficiency over existing baselines, and simulation studies establish operational readiness for real-world deployment.