Fast Voxelization and Level of Detail for Microgeometry Rendering
Abstract: Many materials show anisotropic light scattering patterns due to the shape and local alignment of their underlying micro structures: surfaces with small elements such as fibers, or the ridges of a brushed metal, are very sparse and require a high spatial resolution to be properly represented as a volume. The acquisition of voxel data from such objects is a time and memory-intensive task, and most rendering approaches require an additional Level-of-Detail (LoD) data structure to aggregate the visual appearance, as observed from multiple distances, in order to reduce the number of samples computed per pixel (E.g.: MIP mapping). In this work we introduce first, an efficient parallel voxelization method designed to facilitate fast data aggregation at multiple resolution levels, and second, a novel representation based on hierarchical SGGX clustering that provides better accuracy than baseline methods. We validate our approach with a CUDA-based implementation of the voxelizer, tested both on triangle meshes and volumetric fabrics modeled with explicit fibers. Finally, we show the results generated with a path tracer based on the proposed LoD rendering model.








Paper Prompts
Sign up for free to create and run prompts on this paper using GPT-5.
Top Community Prompts
Explain it Like I'm 14
Overview
This paper is about making 3D graphics of tiny, detailed materials—like cloth fibers, hair, or brushed metal—look right while still running fast. The authors created a fast way to turn very detailed shapes into “voxels” (think 3D pixels or tiny cubes), and a new way to keep those cubes looking correct from far away or up close. Their method keeps important “direction” information (which way fibers lean) so materials don’t turn into blurry mush at lower detail levels.
What the researchers wanted to find out
The paper focuses on three big questions, explained simply:
- How can we convert super-detailed, skinny shapes (like fibers or thin surfaces) into 3D cubes quickly and without wasting memory?
- How can we store not just “how much stuff is in this cube,” but also “which direction does that stuff point,” so materials that depend on direction (like brushed metal or cloth) look right?
- How can we build “levels of detail” (LoD)—coarser versions of the data for when objects are far away—without losing the important look of the material?
How the method works (in everyday terms)
Here’s a plain-language tour of their approach:
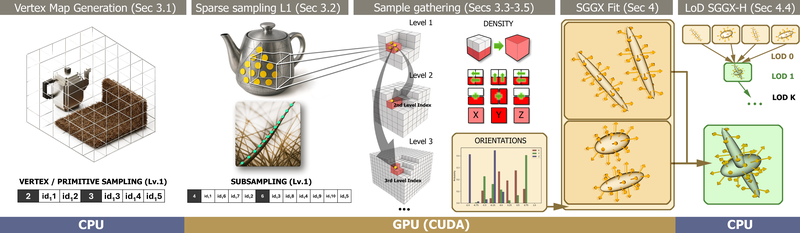
- Voxels as Lego blocks: The world is divided into tiny 3D cubes (voxels). Instead of filling every cube (which would be slow and waste memory), they only process the cubes that actually contain something—this is crucial for “sparse” materials where most space is empty air.
- Sampling tiny pieces: For shapes like curves (fibers) and surfaces (triangles), they create lots of small sample points. Each sample stores:
- where it is in space,
- which way it points (like the fiber’s direction),
- what material it belongs to.
- Grouping samples into their cubes: All samples are gathered into the voxels they belong to. For each cube that has samples, the method builds a “direction histogram”—basically a count of how many fibers point in each direction.
- Compressing direction info smartly: Storing full histograms for every cube is heavy. So they compress each histogram into a simple shape called an SGGX distribution. You can think of SGGX as a squished 3D ball (an ellipsoid) that describes how directions are spread out. This captures the “look” of fibers pointing more one way than another using just a few numbers.
- Building Levels of Detail (LoD) that keep the look: When you move away from an object, you want to use fewer, bigger cubes. Instead of just averaging (which makes everything look flat and dull), they:
- collect the SGGX “direction blobs” from the fine cubes,
- compare and merge the most similar ones first (a bit like clustering similar shapes together),
- build a hierarchy (a ladder of detail levels) that still preserves the key directions.
- This keeps the material’s “directional look” (anisotropy) even at coarse detail.
- Fast on the GPU: They wrote the system to run in parallel on graphics hardware (CUDA), which makes it fast even on large, complex models.
Main results and why they matter
- Faster voxelization for tiny, sparse details: Their GPU method works quickly and efficiently on models with millions of tiny parts (like bundles of fibers), often finishing in under a minute even on modest hardware.
- Memory-efficient for sparse data: Because they only process cubes that contain something, they don’t waste memory on empty areas. This is perfect for hair, cloth, or thin surfaces where most of the volume is empty.
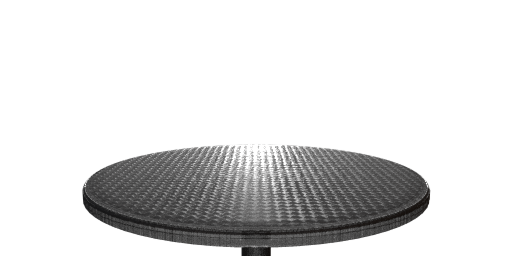
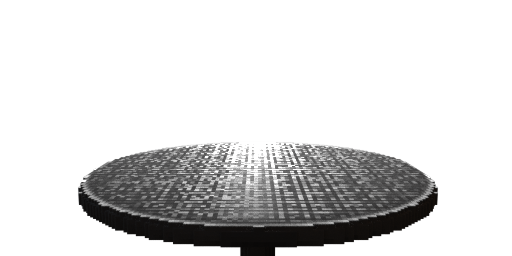
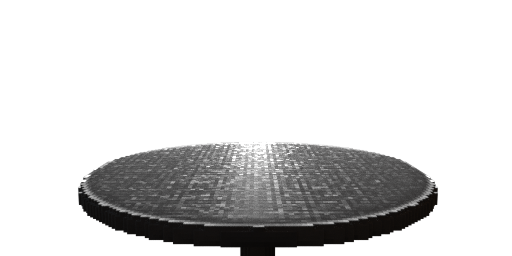
- Better appearance at lower detail: Their LoD method (called SGGX-H) keeps the important direction information of fibers or brushed surfaces. Compared to simple averaging, their renders look sharper and more realistic from different distances.
- Flexible for different materials: They keep the “directional shape” (SGGX) separate from the material model. That means artists or tools can change the material (like how shiny or fuzzy it is) without rebuilding the whole data structure.
What this could mean in practice
- More realistic fabrics, hair, and metals in games and movies, especially when objects are far away and using Level of Detail.
- Faster preparation of complex scenes: big wins for production pipelines that need to convert detailed assets to voxel form.
- Better editing and experimentation: because geometry direction and material rules are kept separate, creators can tweak materials without redoing everything.
- A good fit with modern 3D techniques that use volumes or sparse data, helping balance quality, speed, and memory.
In short, this paper offers a smart way to pack the “feel” of tiny structures—especially their directions—into compact voxel data that looks right at different zoom levels and runs fast on today’s GPUs.
Knowledge Gaps
Below is a concise list of concrete knowledge gaps, limitations, and open questions left unresolved by the paper. Each item highlights a specific opportunity for future research.
- Lack of formal error analysis for SGGX fitting: no quantitative comparison between per-voxel histograms and their SGGX approximations (e.g., angular error, KL/EMD on spherical histograms), nor sensitivity to histogram binning and the chosen 5000-sample estimate.
- Unimodal leaf-level approximation: fitting a single SGGX per leaf voxel cannot capture multi-modal orientation distributions; the paper does not explore mixtures at leaf level, criteria to trigger mixtures, or the resulting memory/quality trade-offs.
- Similarity metric choice for clustering: distance between SGGX distributions is computed via Wasserstein distance over Cartesian 3D histograms; rotation-invariance, binning biases, and whether spherical metrics (e.g., EMD on sphere, angular Wasserstein) would be superior remain unexplored.
- Clustering complexity and scalability: the hierarchical agglomerative strategy requires O(M2) pairwise distances per block and thousands of sampling operations; no complexity bounds, runtime/memory profiling, or pruning/approximation strategies are provided for large M or large grids.
- Mixture weights and sampling during rendering: the paper caps mixtures at “up to 3” SGGXs but does not specify how mixture weights are determined, how they relate to physical volume fractions, or how to integrate mixture sampling and MIS without bias.
- Density/occupancy modeling is ad hoc and view-axis limited: directional density is derived from projections onto XY/XZ/YZ planes and occupancy as a fraction of “hit” voxels; no analysis of the physical correctness of this proxy for correlated media (e.g., non-exponential transmittance), nor comparison to models like Vicini et al. or to ground-truth transmittance.
- No closed-form density representation: authors avoid SGGX (or other parametric models) for density due to normalization issues; open question: can a normalized parametric model encode directional/scale-dependent density with tractable evaluation and filtering?
- Absence of error-driven LoD control: the LoD construction is data-driven (clustering), not appearance- or error-driven; no perceptual or radiometric error bounds, no adaptive stopping criteria per block, and no analysis of how LoD choices impact image error vs. cost.
- Spatial coherence and seam handling: clustering is performed per block without guarantees of continuity across block boundaries; potential seams and spatial discontinuities are neither analyzed nor mitigated.
- Material properties beyond orientation: while the method separates orientation from material, it does not specify how to store/filter other micro-scale attributes needed by advanced fiber/fabric or brushed-metal models (e.g., fiber radius distributions, cuticle tilt, albedo/roughness variability) without entangling them with scattering.
- Weighting of orientation samples: SGGX fitting uses unweighted orientation samples; it is unclear whether samples are weighted by local cross-sectional area, density, or visibility, which could bias the estimated covariance and degrade physical fidelity.
- Degenerate cases and bias: the jitter-based fix for near-singular covariances may introduce bias; no analysis of bias magnitude, conditions under which it triggers, or robust alternatives (e.g., shrinkage, regularization with physically motivated priors).
- Deterministic subsampling artifacts: GPU-friendly deterministic sampling (rather than randomized/blue-noise strategies) risks structured aliasing; no study of aliasing artifacts, temporal stability, or remedies (e.g., low-discrepancy sequences).
- Dynamic/animated microgeometry: the approach targets static data; no incremental or streaming voxelization strategy for deforming/animated fibers or moving assets, nor support for temporal coherence in LoD/clustering.
- Out-of-core and multi-GPU scaling: although a GPU–CPU split is mentioned, there is no out-of-core scheduling, tiling, or multi-GPU strategy for scenes exceeding device memory, and no discussion of data transfer bottlenecks (e.g., CPU mask generation round trips).
- Parameter choices are fixed/heurstic: use of three LoD levels and 8³ sub-voxels is heuristic; there is no analysis or rule-of-thumb for choosing level count, sub-voxel resolution, or per-block sample budgets as a function of scene sparsity and target error.
- Integration with sparse voxel formats: the method stages data in custom structures; no evaluation of integration with NanoVDB/OpenVDB (for I/O, streaming, compression) or a direct mapping of SGGX mixtures into existing sparse hierarchies.
- Memory footprint of mixtures: while 6 bytes per SGGX is compact, storing up to 3 SGGXs per block across multiple LoDs plus density projections could be sizable; no comprehensive memory budget or comparison to SGGX-only or ABSDF alternatives.
- Render-time performance vs. baselines: no head-to-head render-time comparisons (speed/noise vs. quality) against SGGX-only LoD methods, ABSDF, LEAN/LEADR-like approaches, or neural LoDs across multiple distances and lighting conditions.
- Physical accuracy of transport: the path-tracer integration lacks details on step-size selection, free-flight sampling in correlated media, and energy conservation with the proposed density proxy; no validation against Monte Carlo ground truth with explicit microgeometry.
- Handling of multiple materials per voxel: the pipeline stores a per-sample material ID but does not define how mixtures of different materials within a voxel are represented, filtered across LoDs, or sampled without bias.
- Generality across primitives: while triangles and splines are demonstrated, support for other microgeometry sources (e.g., displacement/normal/tangent maps, parametric sweep surfaces, point sets) is not detailed; associated sampling and filtering rules are open.
- Numerical stability of covariance estimation: no discussion of conditioning, eigenvalue clamping, or stability under low sample counts per voxel; how few samples suffice to produce a reliable SGGX?
- Choice of histogram resolution for similarity: the fixed 5×5×5 binning is arbitrary; no analysis of bin count vs. fidelity, or whether adaptive/spherical binning improves clustering decisions.
- Appearance-preserving vs. model-agnostic trade-off: the authors argue for model agnosticism, but it remains an open question how to best preserve appearance when choosing between model-agnostic orientation storage and model-aware downsampling (e.g., for hair/fabric BRDFs/phase functions).
- Temporal coherence of LoD transitions: the hierarchical clustering tree may cause popping when switching LoDs; no mechanism for smooth transitions, cross-fading distributions, or temporal stability guarantees.
- Validation datasets and metrics: the main text references supplementary F-metrics but lacks clear, reproducible, quantitative evaluations in the paper body (PSNR/SSIM/ΔE across distances, lighting/view sweeps, complex anisotropic benchmarks).
- Implementation portability: the approach is CUDA-specific; no assessment of portability to Vulkan/DirectCompute/Metal, or performance on diverse hardware (including mobile/embedded).
- Public code and reproducibility: source is promised “upon publication,” leaving current reproducibility and independent verification open.
- Theoretical links to non-exponential transmittance: the method cites non-exponential transmittance models but does not connect its density proxy to those theories; deriving or fitting parameters to such models remains an open problem.
Practical Applications
Immediate Applications
The following applications can be deployed with modest engineering effort using the paper’s CUDA voxelizer, SGGX-H LoD generation, and existing volumetric/path-tracing frameworks.
- Hair, fur, cloth, and foliage LoD proxies for offline/VFX rendering (Film/VFX, Animation)
- What: Replace distant explicit microgeometry (hair guides, yarn fibers, leaves/blades) with sparse volumetric LoDs that preserve anisotropic appearance via SGGX-H, reducing rays/samples per pixel at distance while maintaining visual fidelity.
- Tools/workflows:
- “Microgeometry Voxelizer + SGGX-H LoD Baker” as a Houdini/Maya/Blender SOP/plug-in producing OpenVDB/NanoVDB volumes.
- Shaders in Arnold/RenderMan/Karma/Mitsuba/PBRT adapted to sample SGGX orientation fields per voxel.
- Assumptions/dependencies: CUDA-capable GPUs for preprocessing; renderer support for anisotropic volumetric scattering and SGGX sampling; input assets must expose tangents/normals or explicit fiber geometry.
- Games and real-time visualization: build-time microgeometry LoD baking (Games, AR/VR, Real-time engines)
- What: Pre-bake SGGX-H volumetric proxies for hair cards, brushed metals, and fabrics to reduce draw calls and shader cost at mid/far distances.
- Tools/workflows:
- Unreal/Unity asset import pipeline step (compute/async build) producing compressed sparse volumes.
- Material node/shader function that evaluates SGGX-based anisotropic scattering for volume shells or impostors.
- Assumptions/dependencies: Compute-shader or CUDA port; volume streaming/instancing support; careful memory/LOD transitions to avoid popping; mobile may need further compression.
- Product visualization/e-commerce materials at variable zoom (Retail, Automotive, Consumer products)
- What: Maintain realistic anisotropic fabrics and brushed metals when zooming while keeping server/desktop rendering cost controlled via SGGX-H LoDs.
- Tools/workflows:
- Offline LoD bake integrated into KeyShot/VRED or custom WebGPU/WebGL viewers with SGGX-capable shader.
- Batch conversion of high-resolution normal/tangent textures to volumetric orientation distributions.
- Assumptions/dependencies: Viewer needs SGGX orientation evaluation; precomputation time; large catalog throughput requires automation.
- Architectural/digital twin vegetation and soft furnishings (AEC, Digital twins)
- What: City- and building-scale rendering with dense shrubs/grass, curtains/carpets rendered via SGGX-H volumes for distant/mid-range views.
- Tools/workflows:
- OpenVDB/NanoVDB volumes streamed per zone; engine integrates LoD switching based on distance/importance.
- Assumptions/dependencies: Sparse volume paging; consistent BRDF/phase-function selection across LoDs; foliage/hair assets must expose directional data.
- Material authoring with editability preserved across LoDs (Software tools, DCC)
- What: Because microgeometry direction distributions are stored separately from phase/BSDF, artists can swap scattering models (e.g., SGGX microflake vs. fiber models) without rebaking geometry.
- Tools/workflows:
- Substance Designer/MaterialX/USD pipelines augmented with a “Volume Orientation Field” asset alongside textures.
- Assumptions/dependencies: Tooling must ingest/export SGGX fields; renderer must reorient chosen material models by sampled directions.
- Scientific/medical visualization for sparse, oriented media (SciVis, Medical imaging)
- What: Interactive viewing of sparse, orientation-rich structures (e.g., fiber tracts, fibrous tissues, porous media) with multiscale LoDs that preserve direction statistics.
- Tools/workflows:
- ParaView/VTK plug-in to voxelize line sets or fields into SGGX-H volumes for scalable exploration.
- Assumptions/dependencies: Input provides orientations; rendering uses volume shading that can sample SGGX; data conversion to sparse volume formats.
- Storage and memory efficiency for microgeometry-heavy assets (Production pipelines)
- What: Volume memory scales with occupied samples rather than grid resolution; suits scenes with very low volumetric occupancy (hair/fibers/thin shells).
- Tools/workflows:
- Asset build step produces sparse volumes (NanoVDB/OpenVDB); LoD chain used by render farm and interactive previews.
- Assumptions/dependencies: Sparse data structures in the target renderer; consistent block sizes and streaming.
- Research baselines and teaching modules on anisotropic LoD (Academia)
- What: Use the CUDA voxelizer and SGGX-H clustering as a reproducible baseline to study LoD for anisotropic volumes, compare against averaging, and prototype new distance metrics or clustering.
- Tools/workflows:
- PBRT/Mitsuba integrator modifications; open-source code and scenes.
- Assumptions/dependencies: Availability of released code; familiarity with SGGX and volumetric path tracing.
Long-Term Applications
These opportunities require additional R&D, standardization, or systems integration (e.g., real-time constraints, hardware support, or new formats).
- Real-time, per-frame microgeometry LoD generation and streaming (Games, AR/VR, Cloud gaming)
- What: On-the-fly voxelization and SGGX-H updates for dynamic hair/cloth/foliage with temporal coherence and artifact-free LoD transitions.
- Potential tools/products:
- Engine module using async compute queues to update sparse blocks; perceptual LoD controllers.
- Assumptions/dependencies: Fast compute-shader/CUDA kernels on target hardware; robust streaming and caching; temporal filtering to reduce flicker.
- Hardware acceleration for anisotropic volumetric shading (Semiconductors, Graphics APIs)
- What: Dedicated ISA or RT-core support for sampling/evaluating SGGX-like distributions to cut per-pixel cost for microgeometry proxies.
- Potential tools/products:
- API extensions in Vulkan/DXR/Metal; hardware-accelerated microflake/splat volume paths.
- Assumptions/dependencies: Vendor adoption; shared data formats for orientation distributions; strong use cases in engines.
- Standardization in asset formats and pipelines (Standards, Interoperability)
- What: Extensions to USD/glTF/MaterialX to carry “volume orientation fields” and SGGX-H LoD hierarchies, plus Hydra delegates that render them consistently.
- Potential tools/products:
- USD schema for sparse SGGX volumes; MaterialX nodes for SGGX orientation sampling; Hydra delegates for offline/real-time.
- Assumptions/dependencies: Community consensus; backward compatibility with existing materials and normal/tangent maps.
- Neural–analytic hybrids for microgeometry (Research, Software)
- What: Combine SGGX-H with learned priors (e.g., Gaussian splatting or NeRF variants) to compress and reconstruct microstructure appearance with better temporal coherence and editability.
- Potential tools/products:
- Optimizers that fit SGGX fields from images; neural predictors for LoD clustering decisions.
- Assumptions/dependencies: Stable training targets for high-frequency anisotropy; joint optimization of geometry and appearance; robust generalization.
- Capture-to-virtual pipeline for textiles and finishes (Industrial design, Fashion, Metaverse)
- What: Scan or infer fiber orientations (e.g., from photometry or microscopy) and directly produce SGGX-H LoDs for use across product configurators and digital twins.
- Potential tools/products:
- Orientation field inference from photometric stereo; textile scanner to SGGX-H exporter; automated QA for anisotropy fidelity.
- Assumptions/dependencies: Reliable orientation acquisition; calibration datasets; integration in PLM/PDM tools.
- Robotics and sensor simulation with complex materials (Robotics, Autonomy)
- What: Simulate LiDAR/camera interactions with anisotropic textiles, carpets, and brushed metals using microgeometry proxies for more realistic perception tests.
- Potential tools/products:
- Simulator plug-ins leveraging SGGX volumes for BRDF/phase interactions; domain randomization over orientation distributions.
- Assumptions/dependencies: Sensor models require volumetric anisotropy; real-time constraints; validation against empirical measurements.
- Energy- and cost-aware rendering policies in production (Policy, Sustainability, Enterprise IT)
- What: Use SGGX-H LoDs to cut render times and energy consumption for microgeometry-heavy shots; adopt internal guidelines that mandate LoD proxies beyond certain view distances.
- Potential tools/products:
- Render-farm schedulers that auto-swap LoD assets; reporting dashboards attributing energy savings to LoD usage.
- Assumptions/dependencies: Accurate tracking of energy/time; production acceptance of proxy assets; change management in studios.
- Advanced material editing at run time (Software, Engines)
- What: Real-time swapping between fiber and microflake scattering models over the same orientation field to support interactive look-dev and XR configurators.
- Potential tools/products:
- Material UX that hot-swaps phase functions; live preview with SGGX-guided lighting.
- Assumptions/dependencies: Unified shading architecture; carefully managed performance budgets.
- Cross-domain sparse voxelization for scientific computing (Sci/Eng HPC)
- What: Apply the sparse, GPU-optimized voxelizer to other highly sparse datasets (e.g., fracture networks, porous media) with directional statistics preserved for multiscale simulation/visualization.
- Potential tools/products:
- HPC pipelines for multiresolution pre-processing; interoperable VDB-like stores with directional metadata.
- Assumptions/dependencies: Direction fields are well-defined; downstream solvers/viewers can exploit LoD and orientation distributions.
Notes on feasibility across applications:
- The approach assumes availability of orientation information (from geometry, normal/tangent maps, or measurement), and rendering systems that can sample SGGX or equivalent orientation distributions.
- The current implementation is CUDA-based; broad adoption may require compute-shader ports and multi-vendor support.
- SGGX-H preserves anisotropy better than averaging but still approximates complex mixtures; extreme multimodal orientation fields may need more clusters or hybrid models.
- Streaming, culling, and LoD transition strategies must be engineered for target engines to avoid popping and to manage memory effectively.
Glossary
- ABSDF (Aggregated Bidirectional Scattering Distribution Function): A volumetric representation that aggregates the combined scattering behavior of multiple objects into a single function per voxel. "using an Aggregated Bidirectional Scattering Distribution Function (ABSDF), aggregating different appearances for multiples objects in a single voxel."
- anisotropic: Describes properties (e.g., light scattering) that vary with direction, common in materials like brushed metal or fibers. "Many materials show anisotropic light scattering patterns due to the shape and local alignment of their underlying micro structures"
- axis-aligned stencil: A grid-aligned mask indicating occupied regions, often used to accelerate volumetric operations like path tracing. "generate an axis--aligned stencil, using the shape of the filled blocks for later usage during volumetric path tracing."
- Barycentric coordinates: A coordinate system on triangles used for interpolation and sampling across a triangle’s surface. "We use barycentric coordinates for this sampling."
- BSDF (Bidirectional Scattering Distribution Function): A function that describes how light is reflected and transmitted at a surface. "we can map this identifier to different materials (BSDF or Phase Function)"
- Catmull-Rom interpolation: A type of spline interpolation that smoothly passes through its control points, used for curve modeling. "for splines defined using Catmull-Rom interpolation~\cite{Catmull:1974:Splines}"
- correlated media: Participating media where spatial correlations in density or structure affect light transport, requiring specialized models. "Many real-world materials can only be accurately represented using correlated media~\cite{Bitterli:2018:Radiative, Guo:2019:Fractional}."
- CUDA: NVIDIA’s parallel computing platform for running general-purpose computations on GPUs. "We validate our approach with a CUDA-based implementation of the voxelizer"
- dendrogram: A tree diagram that represents hierarchical clustering, showing how elements merge at different similarity levels. "we build a dendrogram of LoDs, by progressively reducing the original set of distributions"
- eigenvalues: Scalars associated with a matrix that describe the scaling along eigenvector directions, used here to parameterize SGGX ellipsoids. "their corresponding eigenvalues "
- eigenvector: A direction along which a linear transformation scales vectors, used to define principal axes of orientation distributions. "extract eigenvector "
- Gaussian Splatting (GS): A neural or analytic scene representation that renders scenes by projecting anisotropic Gaussian primitives. "More recent works, like Gaussian Splatting (GS)~\cite{Kerbl:2023:3DGaussians,Wu:2024:4DGaussians} and its ray-tracing counterparts~\cite{Moenne-Loccoz:2024:Gaussian-RT,Condor:2025:DontSplat}, offer different trade-offs between quality, speed and memory use."
- hierarchical clustering: An unsupervised learning approach that recursively merges similar elements to form a hierarchy of clusters. "pose this problem as a hierarchical clustering method~\cite{Murtagh:2012:Algorithms}"
- LEAN-Mapping: A technique for prefiltering normal maps to reduce aliasing by storing low-order statistics of normal distributions. "LEAN-Mapping~\cite{Olano:2010:LEAN} has been used for real-time scenarios to overcome the problems that arise from normal-map interpolation."
- Lumislice: An algorithm for slice-based volumetric processing originally designed for images, adapted here for volumetric cloth. "Lopez-Moreno et al.~\cite{Lopez-Moreno:2017:Sparse} adapted the Lumislice~\cite{Ying:2001:Lumislice} algorithm for volumetric cloth representation in GPU."
- microflakes/microfacets models: Statistical surface/volume models that approximate fine-scale structure with distributions of tiny flakes or facets for shading. "Different approaches such as microflakes/microfacets models can be used too"
- microgeometry: Fine-scale geometric structures (e.g., fibers, hair, grooves) that influence appearance but are smaller than typical mesh resolution. "microgeometry exhibits particular sparsity."
- MIP-mapping: A multiscale texture technique that precomputes downsampled image pyramids to reduce aliasing and improve performance. "MIP-mapping~\cite{Williams:1983:Pyramidal} has been widely use since it was presented for textures LoD."
- NanoVDB: A GPU-friendly sparse volumetric data structure derived from OpenVDB for high-performance voxel operations. "and its GPU counterpart NanoVDB~\cite{Museth:2021:nanovbd,NanoVDBSoftware} are the industry standard for voxel data management"
- NeRF (Neural Radiance Fields): A neural volumetric representation that learns a continuous radiance field for view-synthesis from images. "Neural Radiance Fields~\cite{Mildenhall:2020:NeRF, Kaizhang:2020:Nerf++} (NeRF)"
- non-exponential transmittance model: A volumetric light transport model that replaces the standard exponential attenuation to better capture complex media. "Vicini et al. ~\cite{Vicini:2021:Nonexponential} proposed a non-exponential transmittance model"
- Normal Distribution Function (NDF): A distribution describing the probability of surface/flake normals, used in microfacet/microflake shading. "in the whole Normal Distribution Function (NDF), not only in the VNDF subsection."
- OpenVDB: A sparse hierarchical data structure and library for efficient storage and processing of volumetric data. "OpenVDB~\cite{Museth:2013:vdbCourse, OpenvdbSoftware} and its GPU counterpart NanoVDB~\cite{Museth:2021:nanovbd,NanoVDBSoftware} are the industry standard for voxel data management"
- phase function: In volumetric rendering, a function describing the angular distribution of scattered light within a medium. "we can map this identifier to different materials (BSDF or Phase Function)"
- SDFs (Signed Distance Functions): Scalar fields storing the signed distance to the nearest surface, used for implicit geometry and neural representations. "geometry explicit representations, such as Signed Distance Functions (SDFs)~\cite{Takikawa:2021:Neural}"
- SGGX (Symmetrical GGX): A 3D orientation distribution (ellipsoidal) extending GGX to volumetric microflake scattering, used to encode directional data. "based on Symmetrical GGX (SGGX)~\cite{Heitz:2015:SGGX}"
- SGGX-H: The paper’s hierarchical SGGX-based representation for LoD that clusters and preserves directional distributions across levels. "SGGX-H: A novel hierarchical volumetric data model for LoD rendering based on Symmetrical GGX (SGGX)"
- SGGX interpolation: Aggregating multiple SGGX distributions (e.g., across voxels) into a coarser-level SGGX approximation. "using SGGX interpolation~\cite{Heitz:2015:SGGX} to aggregate voxels in a $2x2x2$ structure."
- SGGX matrix: The symmetric 3×3 matrix parameterization of an SGGX distribution encoding ellipsoidal normal/orientation statistics. "SGGX matrix defining the distribution of the original histogram"
- VNDF (Visible Normal Distribution Function): The distribution of normals visible from a given direction, used for importance sampling in microfacet-based rendering. "the Visible Normal Distribution Function (VNDF)"
- voxelization: The process of converting continuous geometric primitives into discrete volumetric voxels for storage and rendering. "A novel voxelization method optimized for sparse microgeometry."
- Wasserstein distance: A metric between probability distributions (optimal transport), used here to compare orientation histograms. "we use the xWasserstein distance, which is widely used in probability and machine learning algorithm"
Collections
Sign up for free to add this paper to one or more collections.