- The paper presents a novel framework that uses constrained matrix convex generators to reduce conservatism in reachability and parameter estimation.
- It employs mixed-norm uncertainty representations to preserve the true geometry of Gaussian noise, yielding much tighter confidence sets.
- Empirical results show up to 220× volume reduction and over 1000× faster computations compared to traditional box-based approaches.
Bridging Data-Driven Reachability and Statistical Estimation with Constrained Matrix Convex Generators
Introduction and Motivation
The paper "Bridging Data-Driven Reachability Analysis and Statistical Estimation via Constrained Matrix Convex Generators" (2604.04822) addresses a key bottleneck in data-driven reachability analysis: the conservatism introduced by standard box-based and zonotopic uncertainty approximations, especially under Gaussian noise. By leveraging mixed-norm uncertainty representations through Constrained Convex Generators (CCG) and their matrix counterparts (CMCG), the authors introduce a framework that preserves the geometry of the underlying noise distribution, achieving tighter confidence sets and improved computational properties. The highest-density region (HDR) is used as the statistically exact noise confidence set, and a formal connection is established between statistical estimation (MLE) and reachability via CMCG representations.
Zonotopic, Ellipsotopic, and Mixed-Norm Uncertainty Representations
Standard zonotopes, matrix zonotopes, and their constrained versions (CMZ) rely on ∞-norm bounds, which over-approximate the true geometry of Gaussian disturbances. For high-dimensional systems, such over-approximation causes exponential inflation in volume relative to the actual confidence region, as previously reported (e.g., 310× for q=10 dimensions). Ellipsotopes, as introduced in prior work, unify ellipsoidal and zonotopic forms, and the present paper generalizes these sets to mixed-p CCGs, assigning $2$-norm constraints to Gaussian generators and ∞-norm constraints to bounded generators.
Mixed-norm CCGs accommodate arbitrary partitioning of generator coefficients, allowing the uncertainty representation to match the underlying noise model. The matrix variant, CMCG, further encodes parameter-level uncertainty sets consistent with input-state trajectory data and noise assumptions.
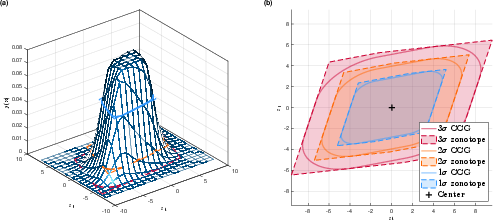
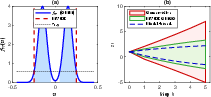
Figure 1: Mixed bounded-Gaussian truncation illustrates how CCG (solid) avoids the box over-approximation imposed by probabilistic zonotope (dashed), preserving the $2$-norm geometry for Gaussian disturbances.
Highest Density Regions (HDR) and Exact Confidence Sets
The HDR is the smallest-volume region covering 1−α probability and thus serves as the natural confidence set for both bounded and Gaussian noise. For convex HDRs, the CCG representation is exact; for non-convex HDRs, as with Gaussian mixtures, the minimum-volume enclosing ellipsoid (MVEE) provides a tractable convex surrogate.
From Noise Geometry to Parameter Uncertainty: CMCG Pullback
A central theoretical contribution is the pullback theorem mapping noise-level CCGs to parameter-level CMCGs. Under Gaussian disturbances, the CMCG coincides with the classical MLE confidence ellipsoid. The parameter uncertainty set depends only on the directions observable in the data, dramatically reducing conservatism compared to box-based approaches, which inflate volume in all noise dimensions regardless of parameter relevance.
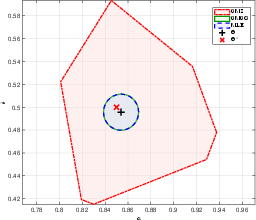
Figure 2: Parameter-set comparison for scalar system (n=1, T=30): CMCG (green, solid) and MLE ellipsoid (blue, dashed) are identical; CMZ (red, dash-dot) is a much larger polytope due to box-based inflation.
For bounded noise, the CMCG reduces to CMZ, matching set-membership feasible set representations, and for mixed bounded-Gaussian noise, CMCG preserves the orthogonal sum, yielding confidence regions strictly tighter than CMZ by retaining the true 310×0-norm geometry for the stochastic component.
Propagation, Product Operations, and Containment
The framework supports forward propagation of uncertainty via CMCG 310×1 CCG products and Minkowski sums, retaining mixed 310×2-norm constraints at each step. The containment theorem guarantees that reachable-set over-approximations are valid outer bounds, and the wrapping error from bilinear generator products is explicitly bounded. The construction avoids the exponential volume inflation typical of box-based Gaussian310×3Gaussian blocks.
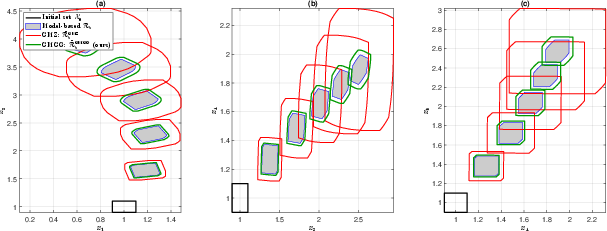
Figure 3: Reachable-set comparison over five propagation steps in a 5D system. The CMCG-based sets (green) remain consistently tighter than CMZ-based sets (red), and closely track the true reachable set (blue).
Numerical Results and Computational Efficiency
Empirical studies confirm strong numerical advantages:
Implications and Outlook
The theoretical implications extend to both statistical estimation and safety-critical model verification. By bridging statistical confidence sets (MLE ellipsoids, HDRs) and data-driven reachable sets, the framework enables sharper, less conservative uncertainty handling in identification, verification, and uncertainty-aware control. In mixed-noise regimes, the partitioned generator structure avoids unnecessary coupling, maximizing tightness and interpretability.
Practically, the CMCG approach preserves tractability for high-dimensional systems, enabling real-time reachable-set computation and enhanced safety verification in settings where bounded and stochastic disturbances co-occur.
Future developments will aim at:
- Richer convex representations (polynomial CCGs) for exact non-convex HDRs
- Distribution-free guarantees via sign-perturbed sums (SPS) and conformal prediction
- Integration into uncertainty-aware control design and adaptive safety verification pipelines in autonomous systems and cyber-physical applications
Conclusion
The paper establishes a principled methodology that aligns uncertainty representations with the underlying noise geometry, guaranteeing coverage while minimizing conservatism. Through mixed-310×6 norm CCG/CMCG sets, data-driven reachability analysis becomes both statistically sound and computationally efficient, with direct connections to statistical estimation theory. The tightness and tractability of CMCG-based sets render them especially valuable for safety-critical systems, with immediate impact on verification and robust control in realistic, uncertain environments.