- The paper introduces a framework that uses composite Control Barrier Functions (CBFs) to guarantee safety for interconnected systems with distinct timescales.
- It leverages singular perturbation theory to lift reduced-order safety certificates to the full system by ensuring boundary layer stability.
- Numerical simulations on robotic arms and optimization-driven control validate the approach, highlighting the importance of adequate timescale separation.
Safe Control of Feedback-Interconnected Systems via Singular Perturbations
Introduction and Motivation
The paper "Safe Control of Feedback-Interconnected Systems via Singular Perturbations" (2604.02132) addresses the challenge of ensuring safety for nonlinear systems that are structured as feedback interconnections of slow and fast subsystems. These architectures are prevalent in contemporary cyber-physical systems, robotics, and optimization-in-the-loop control, introducing dynamics that evolve at disparate timescales and complicate the synthesis of safety-critical controllers.
The authors develop a formal procedure leveraging singular perturbation theory to lift safety certificates designed for reduced-order (slow) models to the overall interconnected system. The approach is grounded in Control Barrier Functions (CBFs) and provides sufficient conditions for constructing composite CBFs that guarantee forward invariance of the desired safe set, provided there is adequate timescale separation between the fast and slow subsystems.
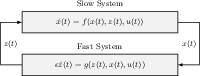
Figure 1: Block diagram depiction of a generic feedback-interconnected system with slow and fast subsystems as formalized in $\eqref{eq:interconnected_system_generic}$.
Control Barrier Functions and Reduced-Order Safety
CBFs are a well-established methodology for certifying safety in nonlinear systems by rendering designated sets (defined through zero-superlevel sets of continuously differentiable functions) forward invariant under suitable feedback policies. The paper reviews CBF theory, including high-relative-degree extensions and integration with Control Lyapunov Functions (CLFs), and emphasizes the limitation of directly constructing CBFs for high-dimensional or interconnected systems.
Instead, the framework posits safety specifications exclusively in the slow subsystem state, defining the safe set for the overall system as Cint={(x,z)∣x∈C}, where x is the slow state and z the fast state. The fast subsystem is assumed to admit an equilibrium manifold parameterized by x and u, and stability properties (uniform global exponential stability) are required for the associated boundary layer system—essential for the subsequent singular perturbation analysis.
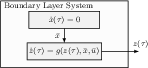
Figure 2: Block diagram representation of the boundary layer system, corresponding to the fast subsystem with frozen slow state and input, as described in $\eqref{eq:bl}$.
Main Theoretical Contributions
The core theoretical contribution is the derivation of sufficient conditions under which a composite CBF—constructed from a reduced-order (slow subsystem) CBF and the Lyapunov function of the fast subsystem’s boundary layer—certifies safety in the full interconnected system. Specifically, the composite CBF is given as V(x,z)=h(x)−U(z−zeq(x,u)), where h is the reduced-order safety measure and U is the Lyapunov function certifying the fast subsystem's stability.
The main theorem proves that, for sufficiently small timescale parameter Cint={(x,z)∣x∈C}0 (controlling the speed disparity), the composite zero-superlevel set Cint={(x,z)∣x∈C}1 is forward invariant for the closed-loop dynamics, thus lifting safety from the reduced model to the full system. The analysis rigorously combines CBF-type forward invariance results with singular perturbation arguments.
Practical Scenarios and Examples
Two representative examples illustrate the framework. The first involves a fully actuated 2-DoF robotic arm where mechanical and electrical dynamics are interconnected, and actuator currents evolve much faster than mechanical states. The system fits the feedback-interconnection model, and the fast subsystem (motor currents) possesses a uniformly globally stable equilibrium. The safety certificate is synthesized on the mechanical reduced-order model, mitigating complexity.
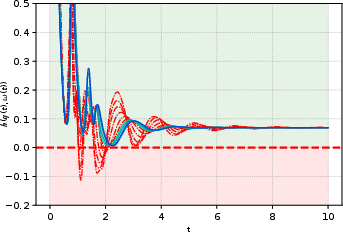
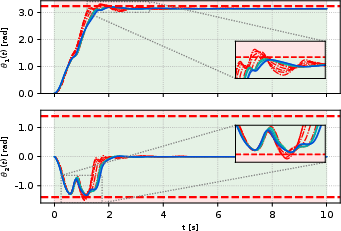
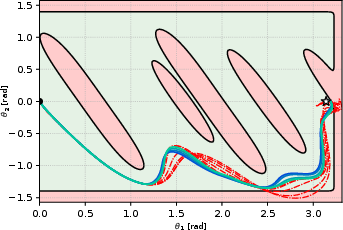
Figure 3: Results for the 2-DoF robotic arm. Evolution of safety certificate and joint angles, with joint-space trajectories distinguishing safe and unsafe regions depending on timescale separation.
The second example considers a plant coupled to a dynamic optimization algorithm that computes safe control actions in real time. The optimization algorithm operates as the fast subsystem, and the plant as the slow subsystem. Safety is enforced by solving constrained nonlinear programs (CBF-QPs) or their dynamic equivalents, and the framework elucidates under which algorithmic speeds safety is preserved.
Numerical Results
Extensive numerical simulations validate the theoretical claims. For the robotic arm, safety is maintained for all times when the timescale separation (Cint={(x,z)∣x∈C}2) is below a critical threshold. Exceeding this threshold induces safety violations, rigorously confirming the necessity of “adequate” timescale separation for correct lifting of reduced-order guarantees. Notably, the simulations use parameter sweeps and color-coded visualization to highlight safety margins.
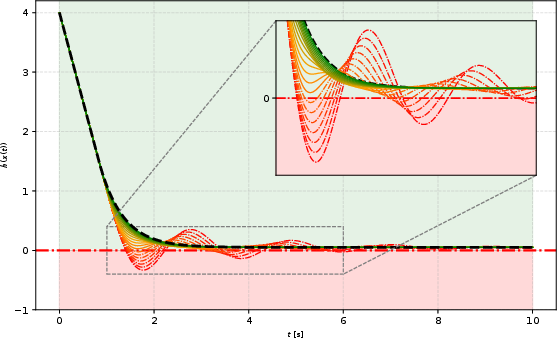
Figure 4: Time evolution of the CBF Cint={(x,z)∣x∈C}3 across varying values of Cint={(x,z)∣x∈C}4. Green denotes preserved safety; red denotes constraint violation. Baseline CBF-QP result shown as dashed black.
For the suboptimal safe control scenario, dynamic safety filters remain effective only under adequate algorithmic speed; slow optimization leads to temporary violations of the safety set, exactly as predicted by the theory.
Implications and Future Directions
The results imply that safe controller synthesis can be substantially simplified in multi-timescale systems: one may exploit reduced-order models for safety filter design, provided timescale separation and boundary layer stability are rigorously verified. This approach is broadly applicable to cyber-physical systems, optimization-in-the-loop architectures, and complex robotics.
Practically, this reduces the computational burden of online safety filtering, as only the slow subsystem requires explicit CBF synthesis. Theoretically, the work provides a general framework integrating safety certification with singular perturbation theory, supporting future explorations in modular safety design and adaptive control.
Potential future developments include:
- Extension to interconnected networks of subsystems with more than two timescales.
- Adaptive schemes for adjusting timescale separation online.
- Integration with data-driven or learning-based reduced-order models, enhancing scalability and applicability in uncertain environments.
- Application to distributed optimization architectures in multi-agent systems.
Conclusion
This paper establishes a formal singular perturbation framework for safe control of feedback-interconnected systems. By combining reduced-order CBF synthesis with boundary layer stability, sufficient conditions are provided for certifying safety in the full system under timescale separation. Numerical studies on robotic arms and optimization-driven safe control concretely demonstrate the efficacy and limitations of the approach. The results inform both theory and practice, guiding future control strategies for complex, multi-timescale architectures.