- The paper presents a novel MPC framework that guarantees recursive feasibility by integrating ECGBFs with backstepping to construct input-constrained reach-avoid sets.
- The methodology demonstrates superior performance on benchmarks like the Dubins car and two-link manipulator by expanding feasible initial conditions while strictly respecting actuator constraints.
- The approach offers a scalable, safety-critical solution for nonlinear control systems by bridging advanced barrier techniques with SOS programming for practical deployment.
Introduction and Problem Statement
This work addresses the synthesis of model predictive controllers (MPC) for continuous-time, control-affine nonlinear systems that must satisfy rigorous safety and reachability (reach-avoid) specifications under hard input constraints. The objective is to ensure that system trajectories remain within a prescribed safe set and reach a designated target set in finite time while always maintaining feasibility of the control problem (recursive feasibility).
While MPC is widely regarded for its ability to accommodate state and input constraints and complex system dynamics, standard approaches struggle to guarantee recursive feasibility and reach-avoid properties, particularly for nonlinear or high-order systems. Existing methods that leverage terminal invariant sets or Lyapunov-based constraints remain computationally nontrivial, especially for nonlinear and multi-input multi-output (MIMO) systems.
The paper introduces a framework combining Exponential Control Guidance Barrier Functions (ECGBFs) and a backstepping procedure to explicitly construct input-constrained reach-avoid sets, facilitating their direct integration as terminal sets in the sampled-data MPC problem. This yields formal recursive feasibility and reach-avoid guarantees, with the framework operationalized for both unconstrained and input-constrained nonlinear systems.
Theoretical Foundation
System Model and Reach-Avoid Objectives
The class of systems considered is continuous, control-affine, and nonlinear: dtdx=f(x)+j=1∑mgj(x)uj;y=h(x),
subject to x∈X and u∈U. The "reach-avoid" specification is encoded via functions ψ and ϕ, defining safe set XS and target set XT. The control policy must guarantee the closed-loop trajectory remains within XS until reaching XT in finite time.
Recursive Feasibility and the ECGBF Approach
A fundamental requirement for safe MPC is recursive feasibility: consistent existence of feasible solutions at every time step. The proposed approach constructs reach-avoid sets via ECGBFs:
- An ECGBF ψ ensures that for any initial condition within its zero-superlevel set, there exists an (unconstrained) control to guarantee the trajectory remains safe and eventually enters the target.
- For general MIMO systems—potentially with high or mixed relative degree—the authors develop a systematic backstepping-based approach to generalize the ECGBF, resulting in a more expressive reach-avoid set x∈X0 (see Lemma 1).
A significant technical contribution is showing how physical input constraints x∈X1 can be incorporated directly into the ECGBF construction, thereby enabling a construction of input-constrained reach-avoid sets amenable to SOS programming (Theorem 1).
Sampled-Data Implementation and Recursive Feasibility
For practical deployment, the MPC framework is realized in a sampled-data setting with zero-order hold on controls. Theoretical results demonstrate that, under sufficiently fast sampling, cornerstone reach-avoid guarantees and recursive feasibility are preserved (Lemma 2 and following theorem). The closed-loop system, with a terminal constraint enforcing membership in the input-constrained reach-avoid set, retains feasibility and convergence for arbitrary initial feasible conditions.
Numerical Validation
Two benchmarks demonstrate the methodology: a modified Dubins car and a two-link planar manipulator. All methods are compared:
- Vanilla MPC (target set as the terminal constraint)
- Unconstrained reach-avoid controller (nonphysical, unconstrained control)
- Proposed constrained reach-avoid MPC (input-constrained terminal set via ECGBF-backstepping synthesis)
For each scenario, large sets of random initial conditions are evaluated for reach-avoid success and compliance with constraints, with a consistent cost and prediction horizon.
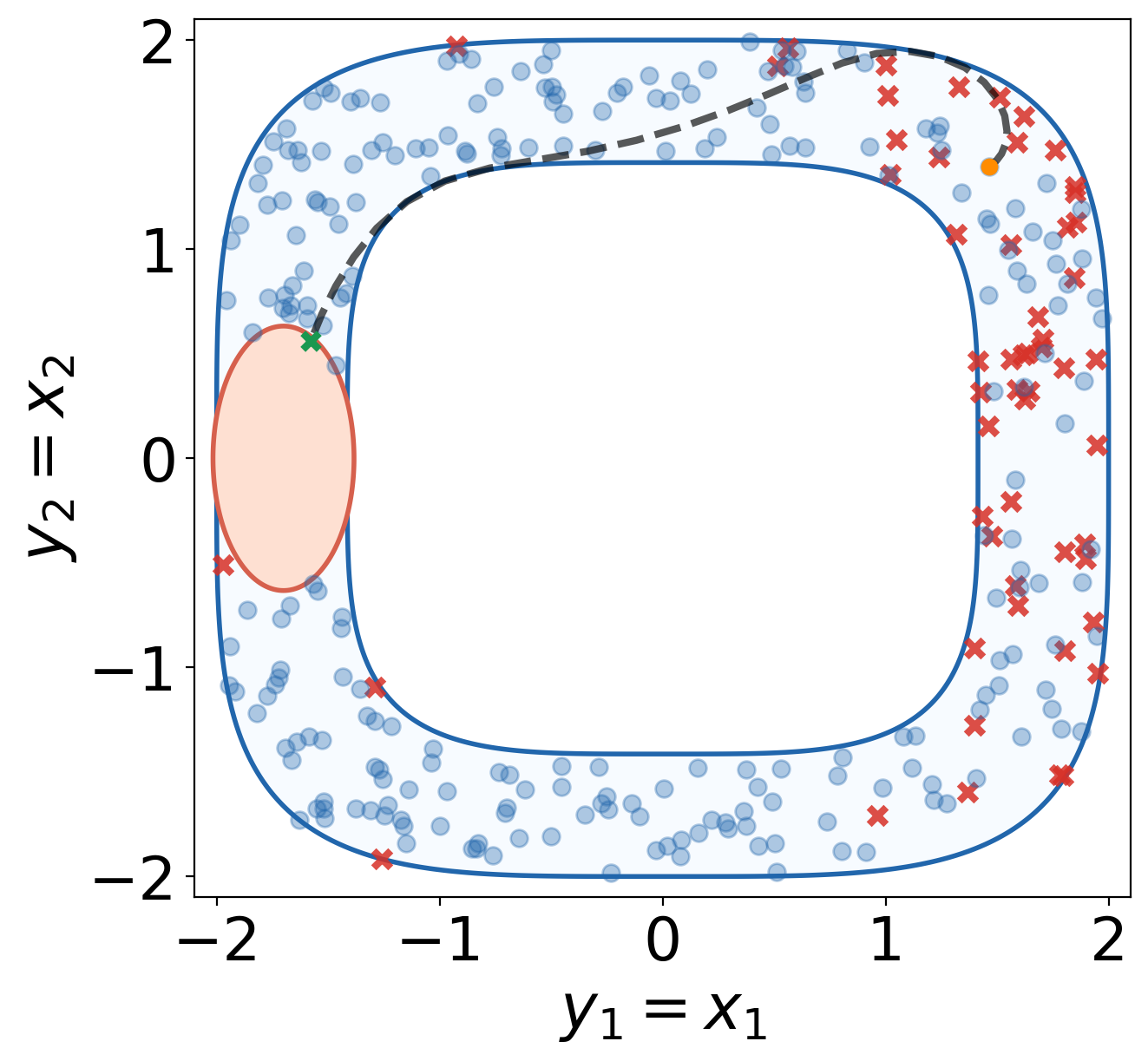
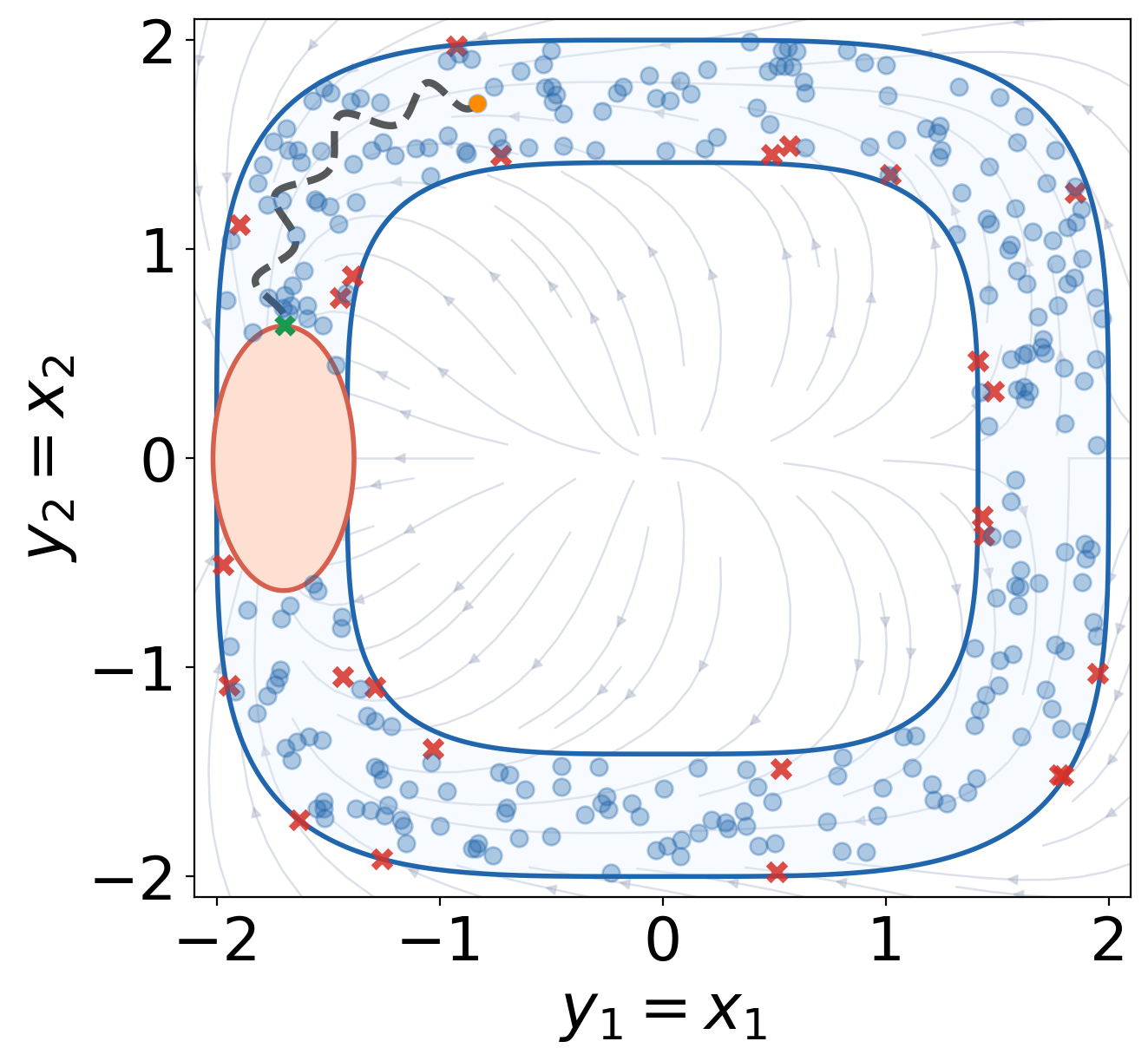
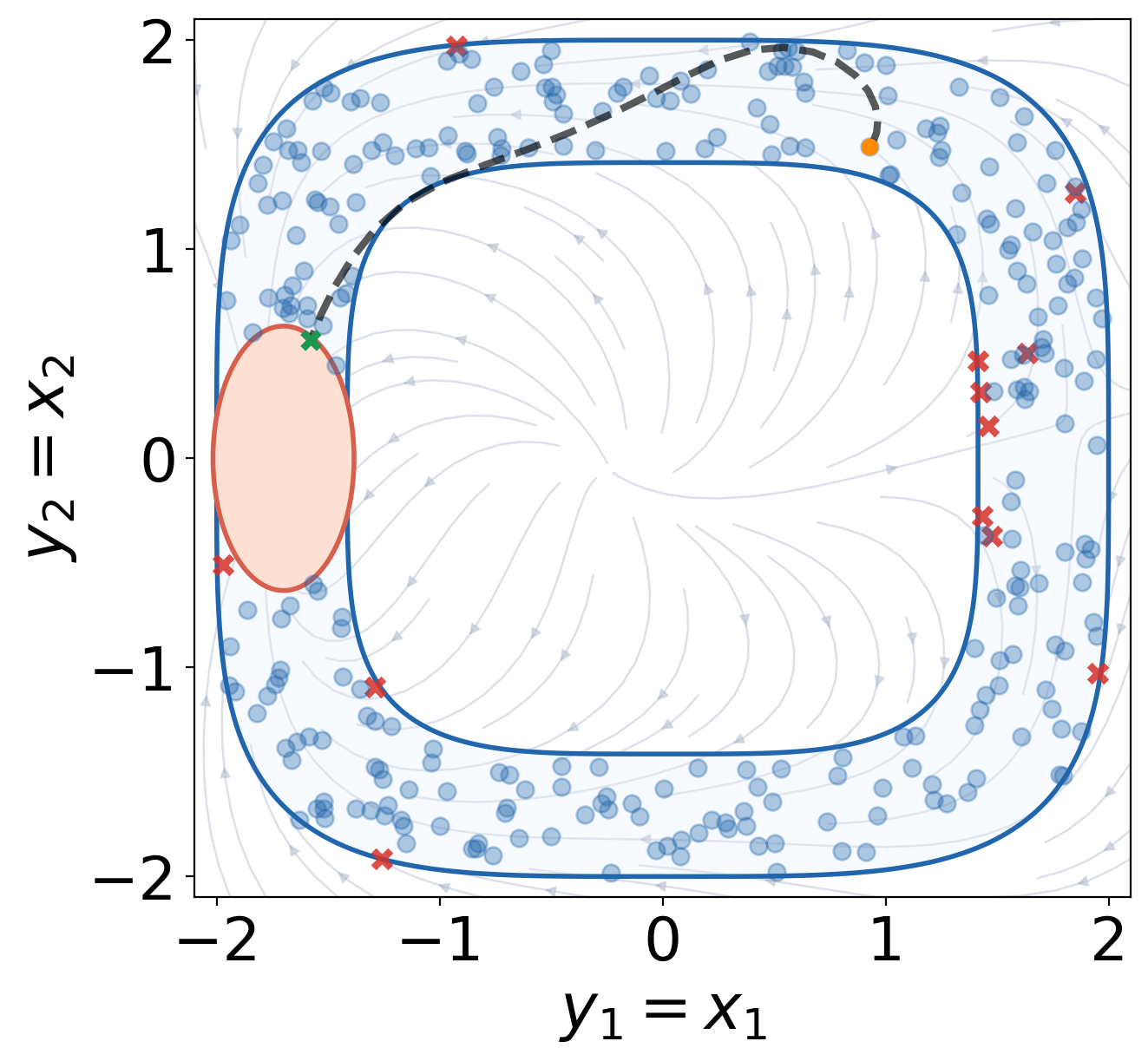
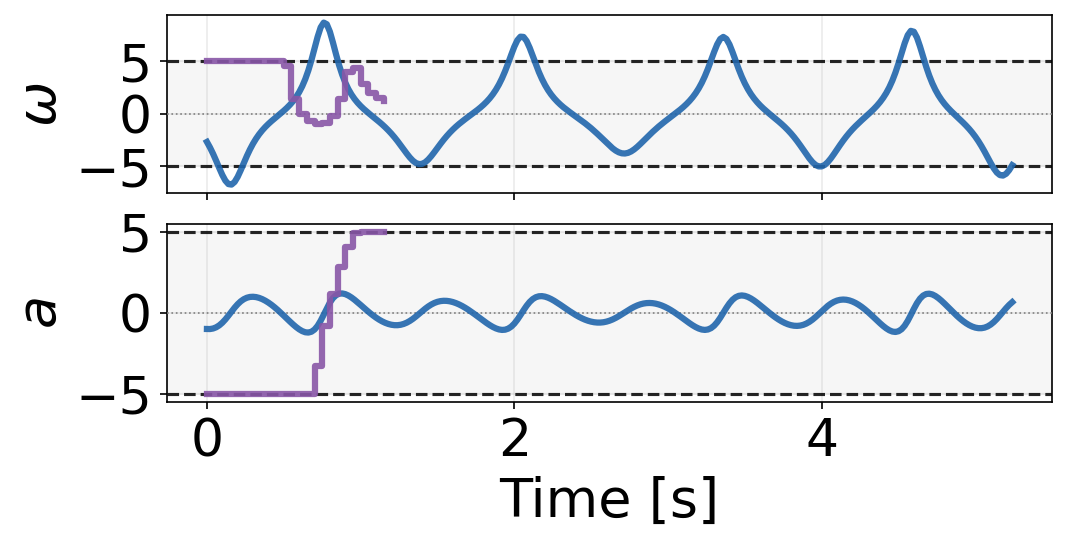
Figure 1: Vanilla MPC baseline performance for the Dubins car, with only 245/300 initial states successfully achieving the reach-avoid objective.
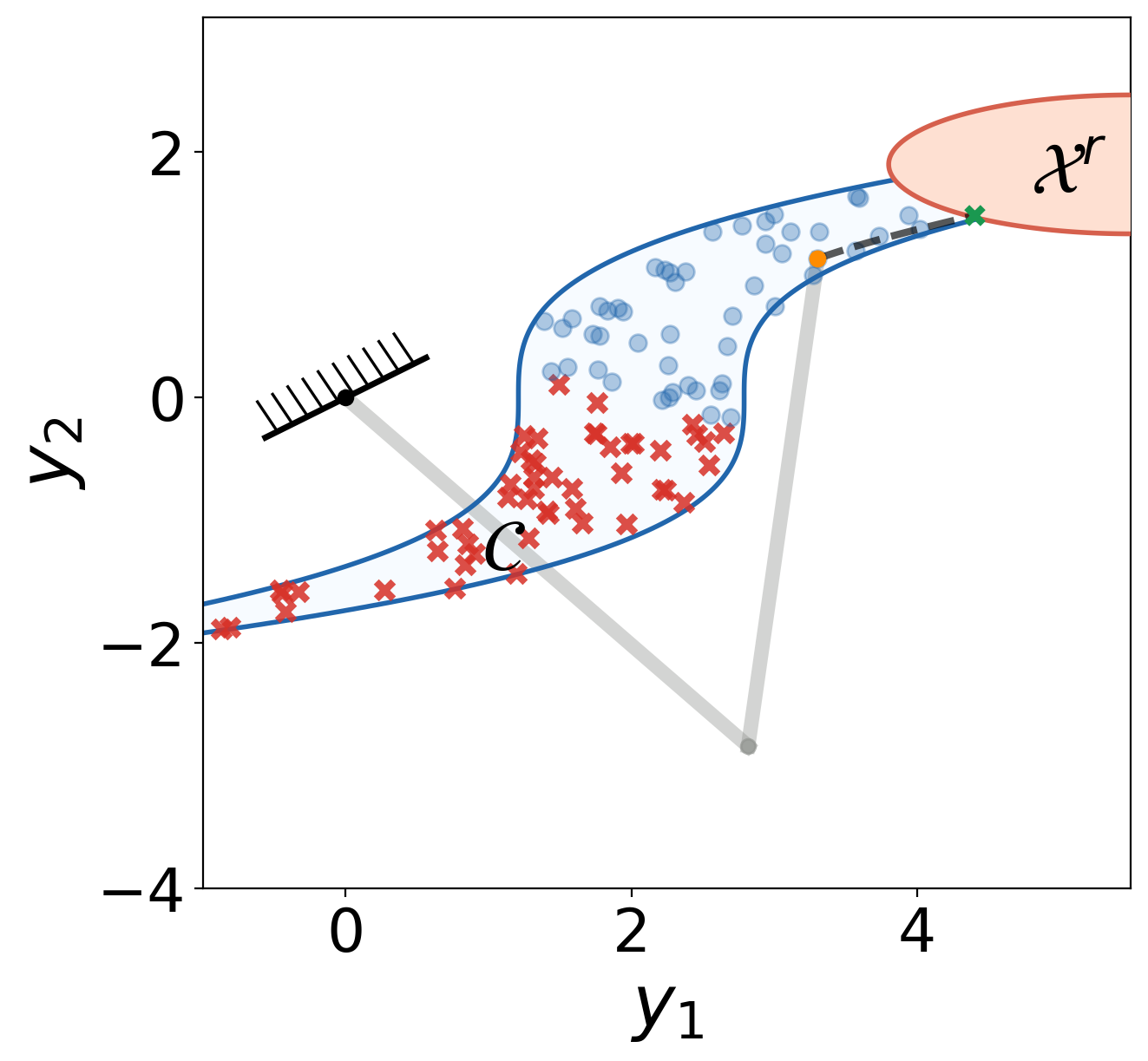
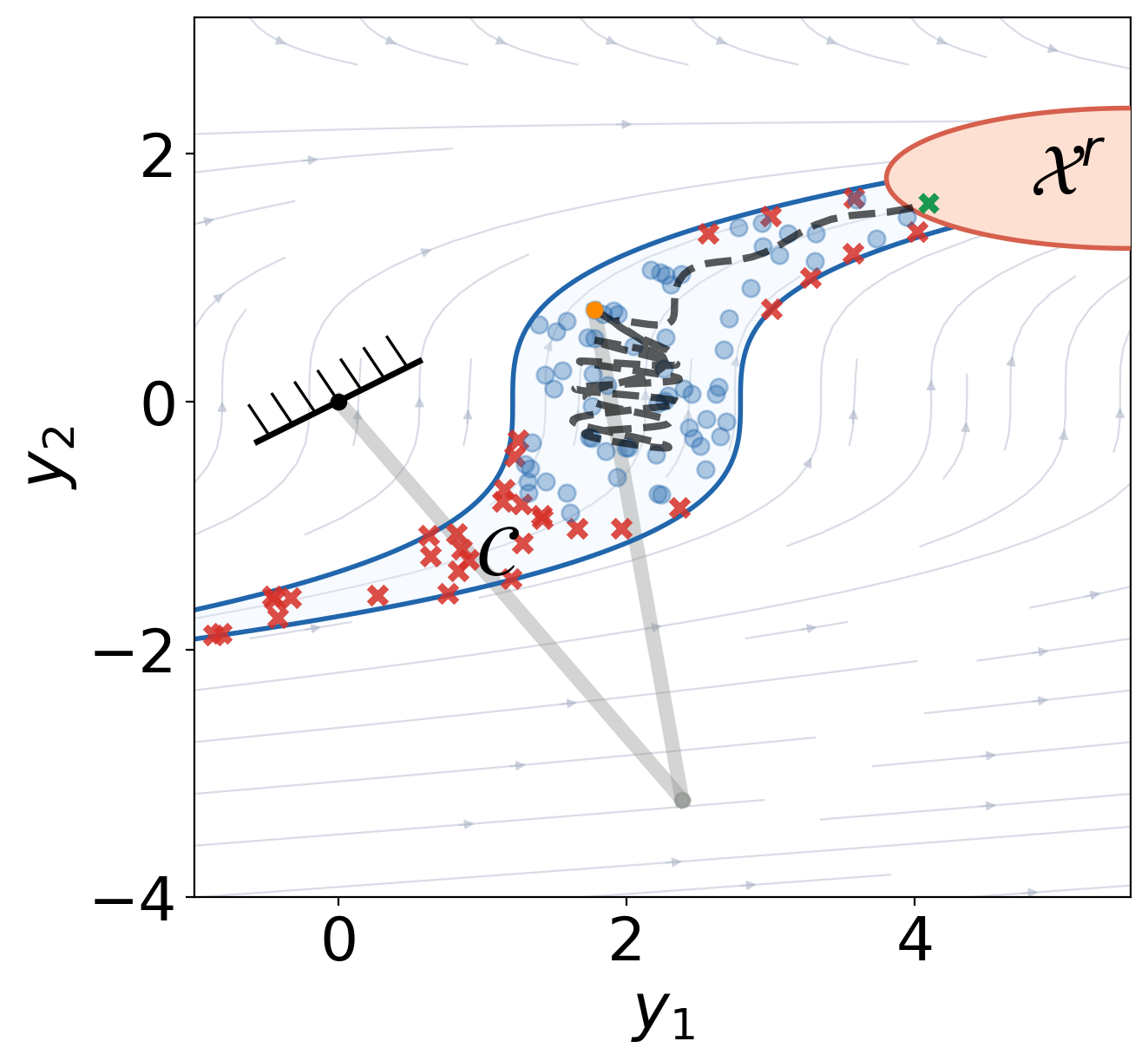
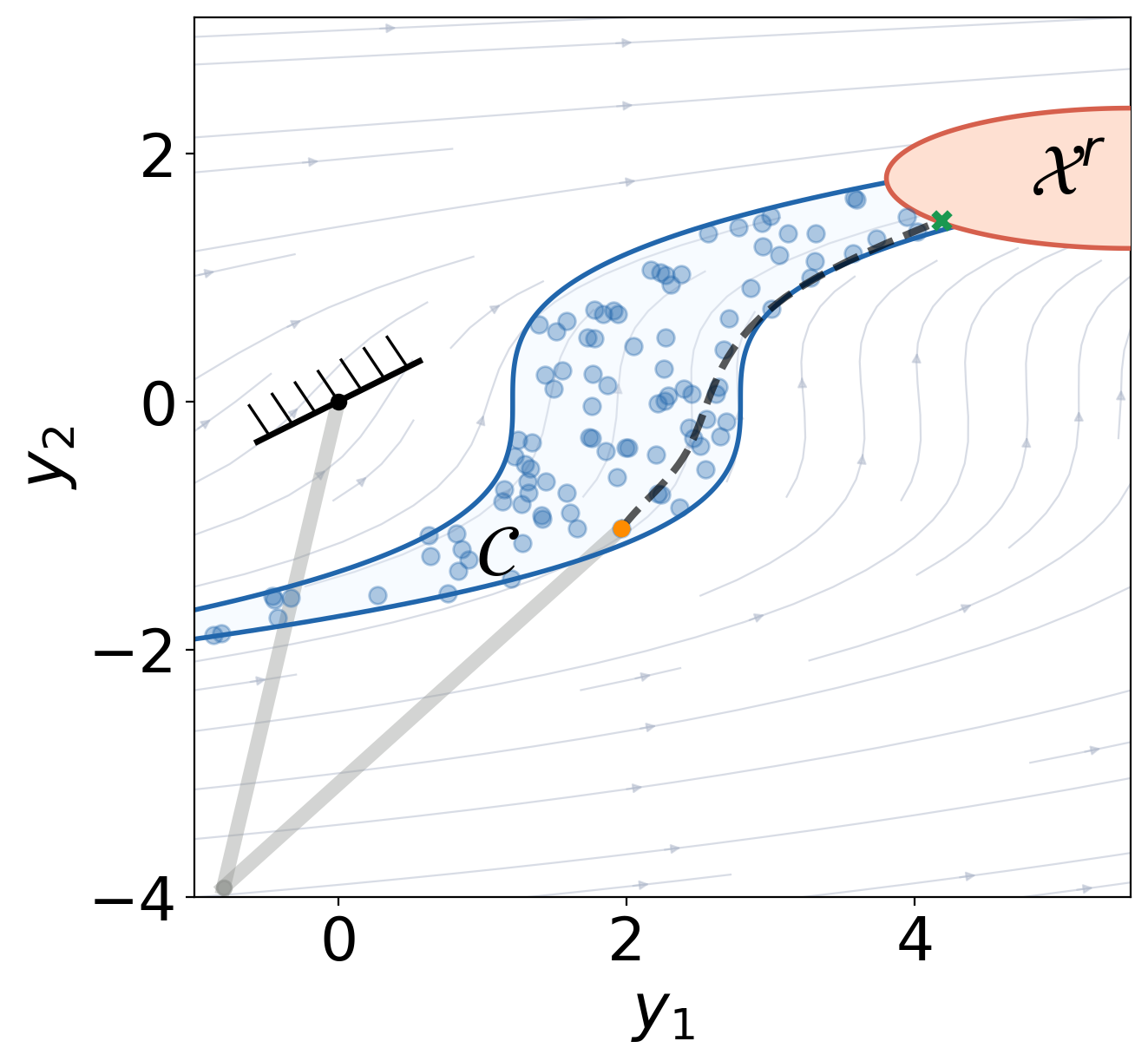
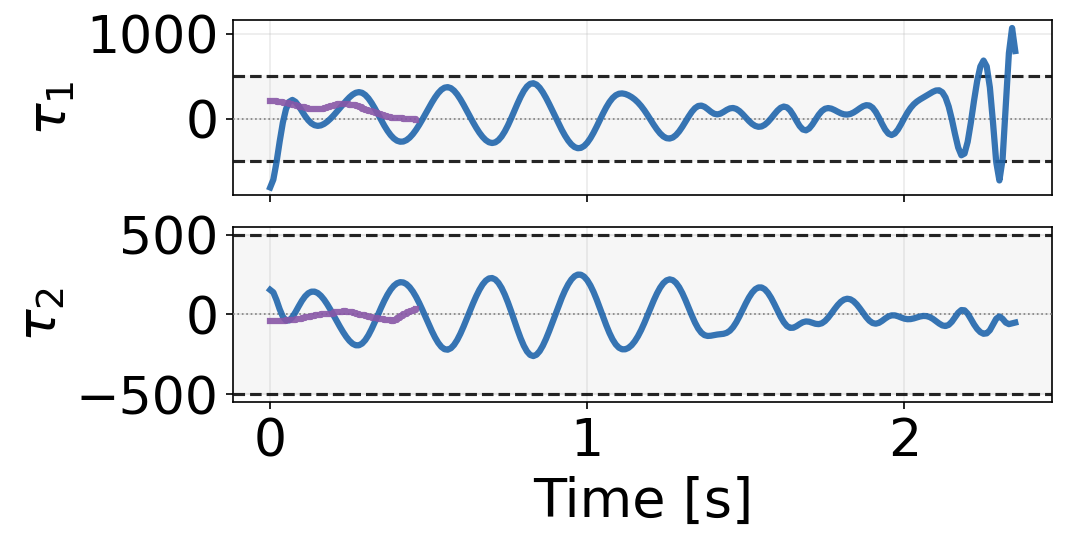
Figure 2: Vanilla MPC baseline performance for the two-link manipulator, with only 50/100 initial states resulting in success.
Observations and Claims
- The constrained reach-avoid MPC demonstrates a substantially larger feasible initial set and higher empirical success rate compared to vanilla MPC under identical computational parameters.
- Trajectories generated by the proposed approach are smoother and respect physical input bounds, often outperforming even the unconstrained reach-avoid controller in both speed and control efficiency.
- Empirical results indicate that, for the Dubins car, the constrained reach-avoid MPC achieves 288/300 successes (versus 245/300 for vanilla) while strictly satisfying actuator constraints; for the two-link robot, all 100/100 test cases are successful for the proposed scheme compared to 50/100 for vanilla MPC.
Practical and Theoretical Implications
The method provides a systematic framework for synthesizing recursively feasible MPC with reach-avoid guarantees for a broad class of nonlinear systems, including those with nontrivial input bounds and MIMO characteristics. The integration of ECGBF-based reach-avoid sets as terminal constraints directly addresses the major limitations of existing invariant-set or Lyapunov-based approaches for nonlinear MPC.
Practically, this enables robust deployment of safety-critical controllers (e.g., for robotics or autonomous vehicles) where input saturation and formal safety guarantees are mandatory. The approach is computationally compatible with existing SOS solvers, though for high-dimensional systems, complexity remains a consideration (the authors propose sampling-based relaxations in this context).
Theoretically, this work strengthens the connection between control-theoretic barrier function tools and computational MPC realizations, expanding the tools available for verified motion planning under hard constraints.
Future Outlook
Anticipated future developments include extension of the framework to address external disturbances and plant uncertainties, as well as further scalability improvements for high-dimensional, real-time applications. The unification of convex optimization techniques and advanced barrier/backstepping designs is likely to inform next-generation safety-critical MPC for nonlinear, high-order, and hybrid systems.
Conclusion
This paper presents a comprehensive sampled-data MPC architecture that synthesizes input-constrained, recursively feasible reach-avoid controllers for nonlinear, control-affine systems. The approach leverages ECGBFs and backstepping to construct terminal sets accommodating both state and input constraints, enabling rigorous reach-avoid guarantees. Strong empirical results demonstrate its advantage over both vanilla MPC and unconstrained approaches, with clear implications for high-assurance autonomous systems.

