- The paper presents an approximate MPC method that combines CLF/CBF to guarantee stability and safety while reducing computational load.
- It utilizes an infinitesimal-horizon approach and SOS programming to derive efficient quadratic programs for feedback control.
- Numerical results on spacecraft control validate broad state space coverage, convergence guarantees, and real-time feasibility.
Safe-by-Design: Approximate Nonlinear Model Predictive Control with Real Time Feasibility
This paper introduces a methodology for implementing approximate nonlinear model predictive control (MPC) that guarantees real-time feasibility while ensuring safety and asymptotic stability. By leveraging concepts from control Lyapunov functions (CLFs) and control barrier functions (CBFs), the proposed approach facilitates the formulation of efficient quadratic programs for feedback control. Here, we discuss the theoretical framework, implementation strategies, and the potential benefits in practical applications.
Methodology Overview
The paper establishes the relationship between continuous-time receding horizon MPC and CLF/CBF theory. The central idea is to derive an infinitesimal optimization problem that approximates the full-horizon MPC. Under the stabilizing terminal condition, the value function and feasible set define a CLF/CBF pair, ensuring stabilizing feedback without compromising safety.
Infinitesimal-Horizon MPC
The infinitesimal-horizon MPC approach solves a quadratic programming problem that outputs a stabilizing control law by ensuring the following:
- Asymptotic Stability: The closed-loop system converges to the desired equilibrium point.
- Safety Constraints: System states remain within predefined safe limits.
- Real-Time Feasibility: The reduced computational complexity allows for implementation on resource-constrained platforms.
Sufficient Condition Estimation
The paper uses sum-of-squares (SOS) programming to compute polynomial approximations for the value function and feasible set. This ensures the computed CLF/CBF pair satisfies the stabilizing terminal conditions, allowing safe and stable control.
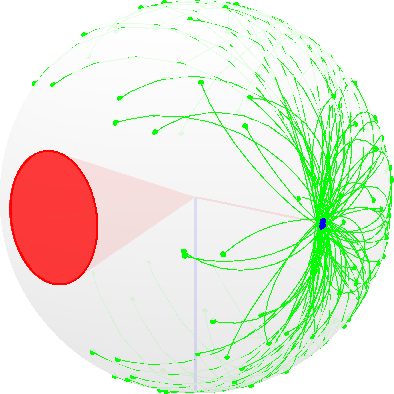
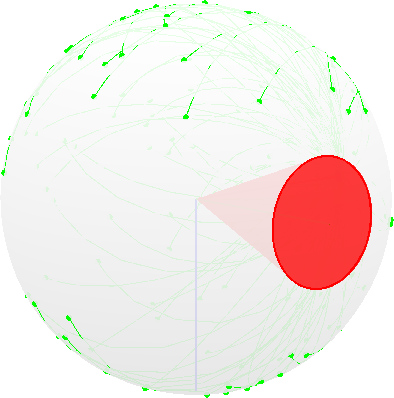
Figure 1: Scenario of constrained satellite re-orientation. The green stars represent initial conditions, and all samples converge safely to the origin while avoiding the keep-out cone.
Numerical Results
The proposed methodology is validated on a nonlinear spacecraft control problem involving large-angle three-axis slew maneuvers with a keep-out cone constraint. The results demonstrate:
- Coverage: Extensive state space coverage with convergence guarantees.
- Performance: Significant reduction in online computational requirements compared to traditional full-horizon MPC and recent methods.
910
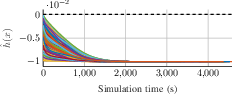
Figure 2: CBF evaluated along trajectories, showcasing the absence of constraint violations throughout the maneuvers.
Conclusion
This paper provides a feasible methodology for implementing nonlinear MPC in real time, with robust safety and stability guarantees. The proposed approach effectively balances performance and computational efficiency, making it particularly suitable for applications in aerospace and automated driving where real-time control is critical. Future research directions include further optimization of the precomputation steps and exploration of broader applications.
In summary, the Safe-by-Design approach offers a promising path forward for applications demanding both real-time feasibility and rigorous safety assurances, potentially transforming how nonlinear MPC is applied in complex systems.