- The paper demonstrates a dual-motor wearable haptic device that produces distinct edge and surface stimuli for effective VR tactile feedback.
- The methodology utilizes precise spatial control with a curved contact surface (0.015 mm precision) and a concentrated edge mode generating up to 5.8 N force.
- The psychophysical study confirmed over 93% discrimination accuracy among varying force conditions, validating the device’s usability in immersive VR.
A Wearable Haptic Device for Edge and Surface Simulation: Technical Review
Introduction and Motivation
Wearable haptic interfaces are critical for advancing immersive object manipulation in VR environments, yet most existing fingertip devices are limited to force or vibratory feedback modes that cannot capture crucial geometric features such as edge contact. Such features are essential, as psychophysical studies establish the importance of edge detection for reliable and accurate tactile exploration of objects. The paper proposes a novel dual-motor, lightweight (24.3 g) wearable device that enables the distinct simulation of both surface and edge contact on the fingertip, filling a persistent gap in the field.
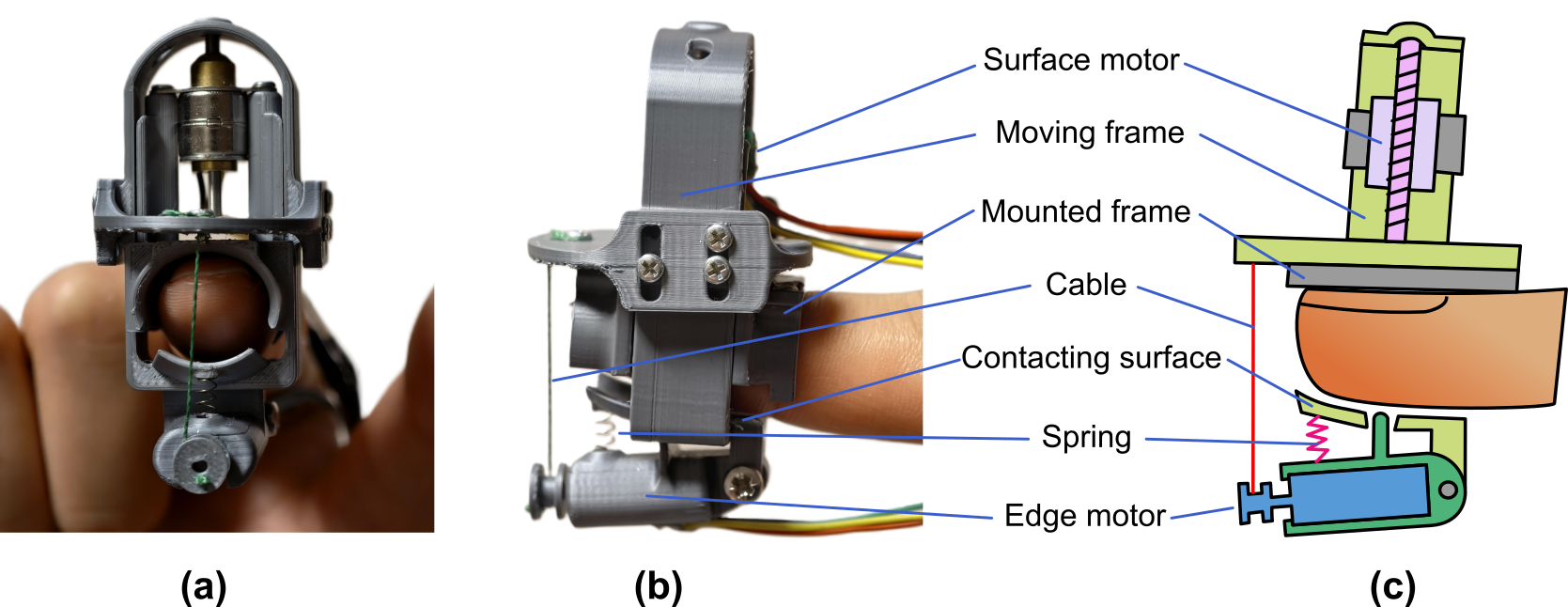
Figure 1: Conceptual design of the haptic device showing the dual-motor mechanism for surface and edge contact stimulation.
Device Architecture and Control System
The proposed device combines two independent actuation modules: one targets distributed surface pressure via a curved contact, and the other delivers spatially concentrated edge cues through a narrow, motor-driven protrusion. The surface actuation subsystem utilizes a miniature stepper motor achieving a theoretical spatial precision of 0.015 mm, and the edge actuation subsystem increases force transmission by a 26.45:1 gear ratio to generate up to 5.8 N force—adequate for salient feedback in both modes. A custom-designed, wrist-mounted control box integrates an ESP32 controller, motor drivers, and lithium battery, enabling up to four hours of autonomous, wireless use.
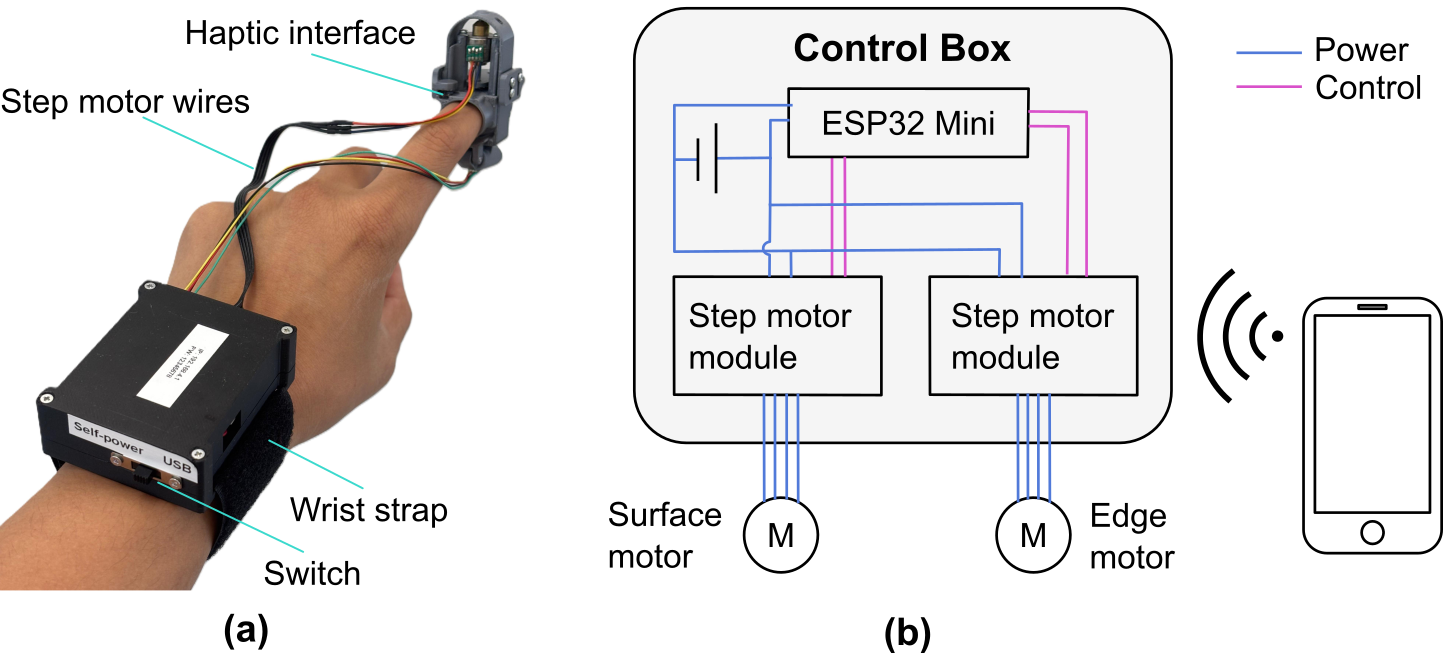
Figure 2: (a) The wrist-mounted control box. (b) System architecture of the control box.
The compact configuration and mechanical separation of edge and surface actuators allow for independent or combined stimulation, supporting a spectrum of tactile patterns. The configuration is ergonomically optimized for the distal phalanx, preserving wearability without compromising feedback fidelity.
Experimental Characterization of Tactile Stimuli
To validate discriminability, pressure distribution measurements were performed using a 6×6 FSR array interposed between the device and the fingertip.
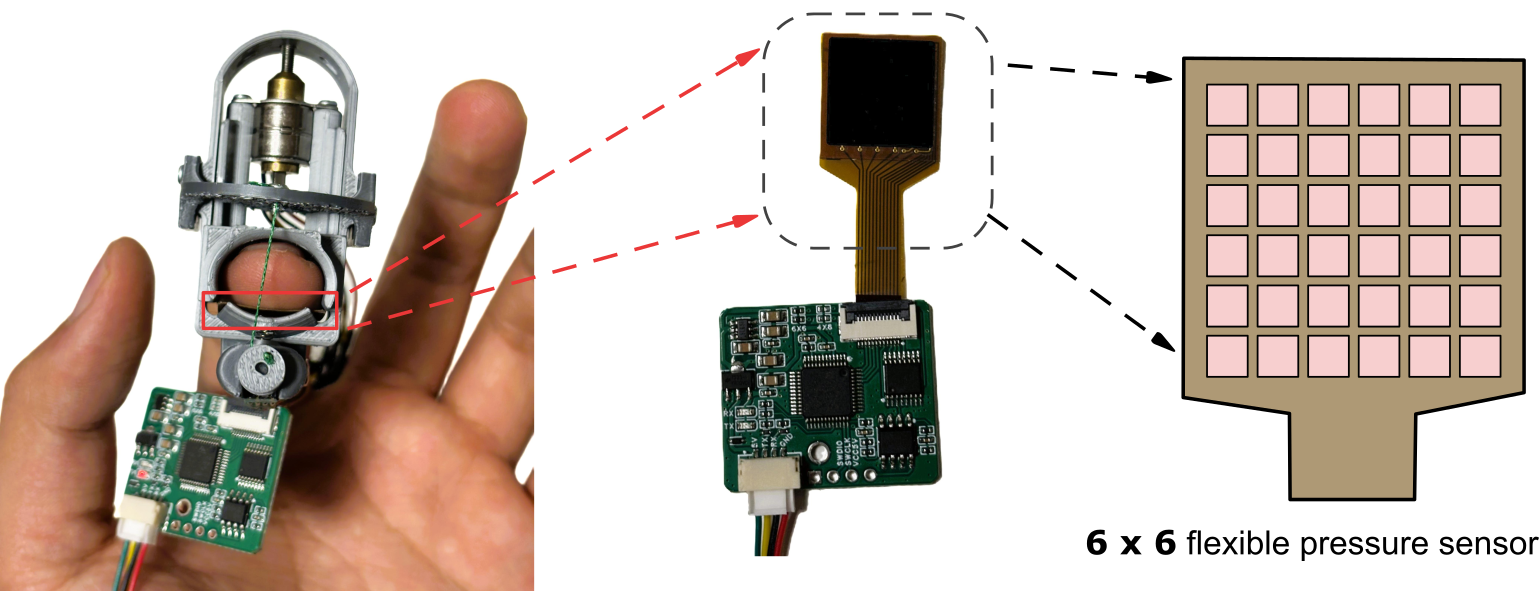
Figure 3: Experimental setup for pressure distribution measurement using a 6×6 FSR array.
Analysis reveals that edge contact produces a narrow, intense pressure band corresponding to the protruding physical edge stimulus, whereas surface contact yields a broader pattern, distributed across the pad of the finger.
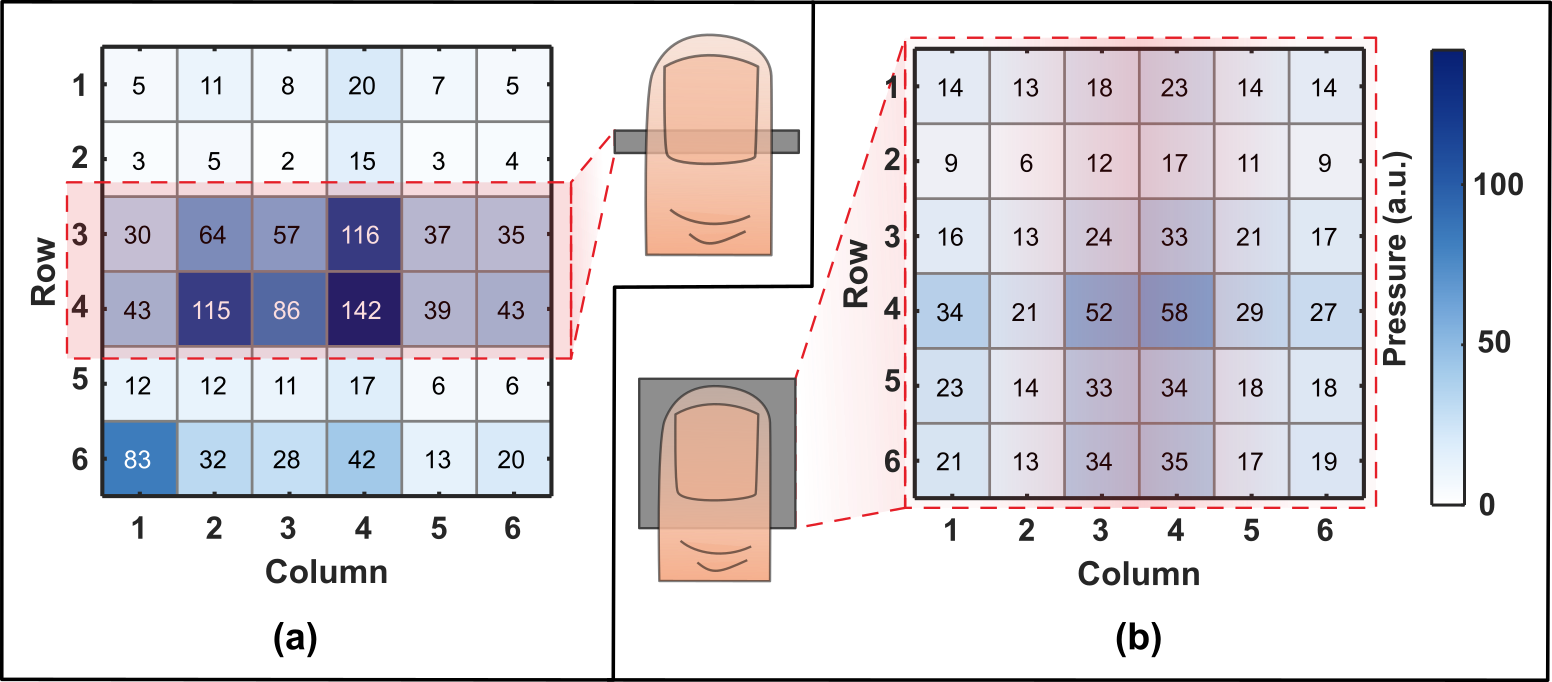
Figure 4: Measured pressure distributions: (a) Edge contact showing concentrated linear pressure. (b) Surface contact showing distributed pressure pattern.
The results objectively confirm that the mechanical design generates distinct tactile cues, with minimal pattern overlap at the sensor level, despite some spatial deviation due to the stiffness mismatch between the FSR array and the device’s curved surface.
Psychophysical Evaluation
A controlled user study (N=5) evaluated perceptual discrimination among four force conditions: light and heavy intensities for both surface and edge contacts. Participants, blinded to visual and procedural context, identified each stimulus following brief training and calibration. The protocol employed randomized presentation and precise motor displacement calibration to ensure repeatability.
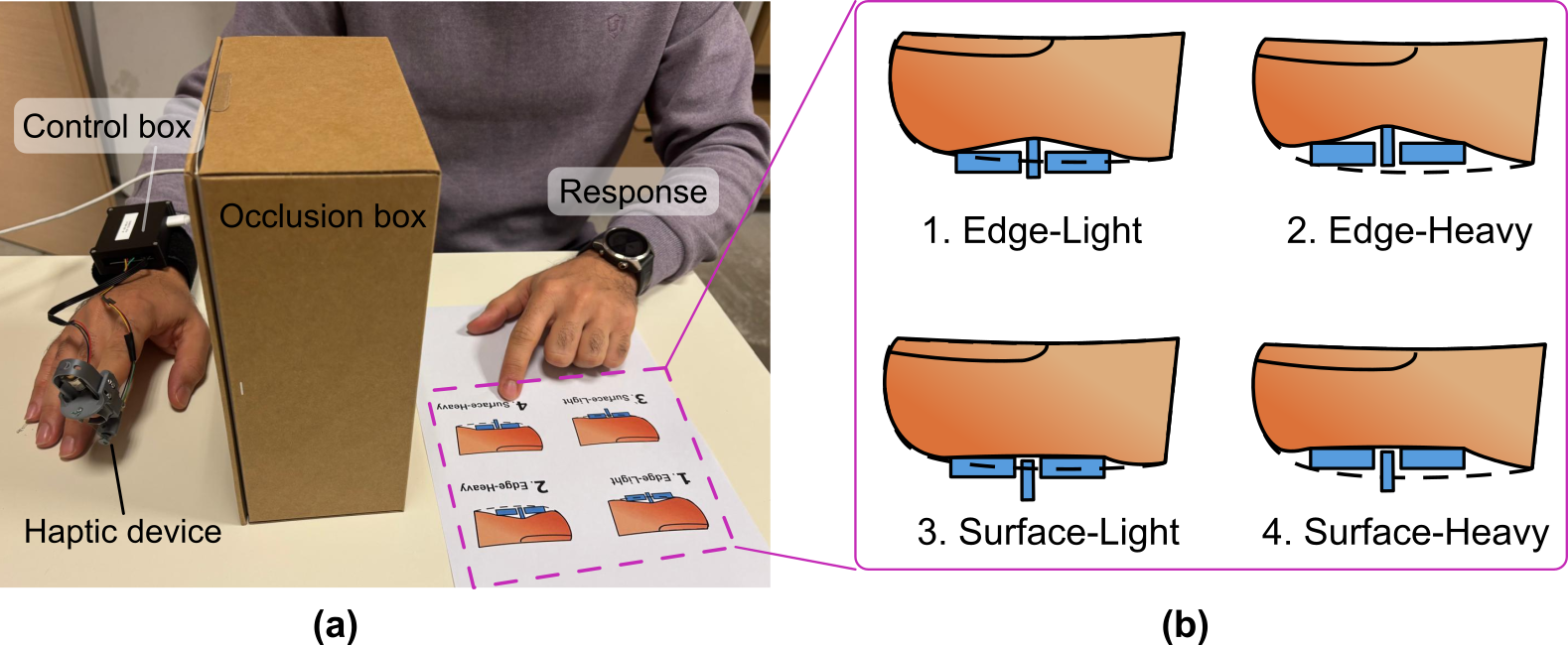
Figure 5: User study protocol: (a) Experimental setup with participant wearing the device. (b) Stimulus presentations.
Classification accuracy across the four conditions was high (mean 93%), with only mild confusion in the high-force surface mode. Response times were consistently below three seconds, indicating rapid and intuitive discrimination of feedback modalities, corroborating the distinctiveness of tactile patterns inferred from sensor data.
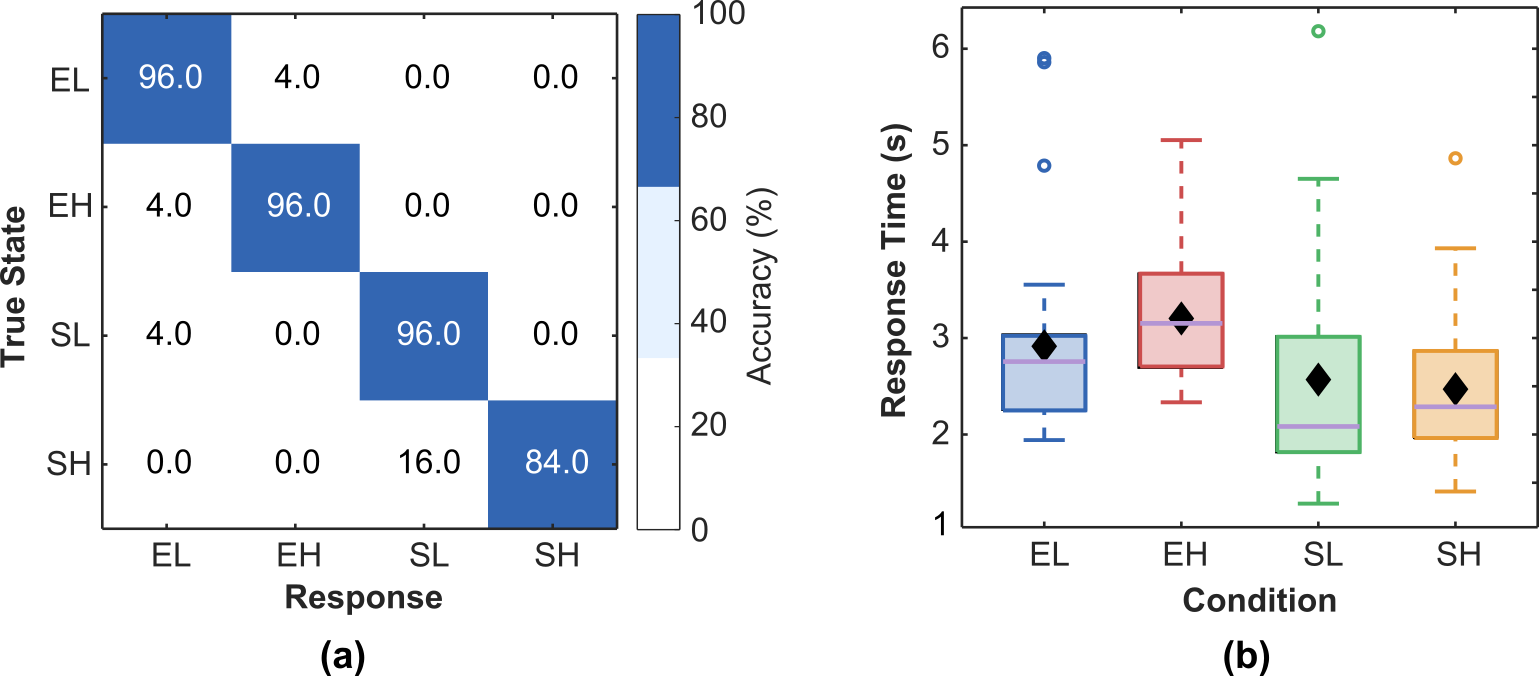
Figure 6: User study results: (a) Classification accuracy across four conditions showing consistently high performance. (b) Response time distribution indicating rapid stimulus discrimination.
Implications and Limitations
The work presents robust evidence that a wearable, dual-actuator haptic device can deliver distinctly perceivable edge and surface cues at the fingertip, demonstrating technical feasibility for compact VR haptic feedback beyond current normal/tangential or vibratory paradigms. Integration with existing VR interaction frameworks could substantially augment realism and manipulation accuracy by conveying geometric constraints, affordances, and transition cues that are currently unattainable with most commercial or research interfaces.
However, the device is presently limited in DoFs regarding the orientation and translation of edge rendering relative to the fingerpad. Potential future improvements include incorporating closed-loop force sensing, redesigning the mechanical interface for reduced weight (e.g., using soft, fabric-based pneumatics), and upscaling the feedback system for multi-digit or whole-hand integration. Additionally, the user study’s limited sample size, lack of gender balance, and reliance on verbal response introduce sources of bias and latency, indicating a need for more comprehensive psychophysical protocols.
Addressing motor noise, individual variation in skin compliance, and form factor optimization will further enhance device performance and ecological validity in interactive scenarios. Long-term durability remains an open engineering challenge.
Theoretical and Practical Impact
The proposed architecture and findings bridge the gap between basic tactile feature delivery and practical VR haptics. On the theoretical side, the results offer a platform to investigate the role of surface–edge transitions and their perceptual thresholds in complex object interactions. Practically, such a device could immediately impact training simulators, teleoperation systems, and interactive VR environments, supporting richer dexterous behaviors, including alignment, assembling, and fine manipulation tasks.
Moving forward, integration with multi-modal setups (e.g., kinesthetic gloves, thermal displays), and embedding in collaborative or multi-user VR platforms, would amplify haptic realism and cognitive presence, especially in applications where contact geometry drives performance outcomes.
Conclusion
This study establishes that compact, wearable devices using independently controlled actuators can provide clearly distinguishable edge and surface tactile feedback at the fingertip, overcoming a key limitation of prevailing VR haptic approaches. The dual-motor mechanism is validated both through sensor-based spatial pressure mapping and psychophysical assessment. The findings position this architecture as a foundational element for next-generation, wearable haptic interfaces supporting advanced manipulation and object exploration tasks in immersive digital environments. Future developments are expected to address higher DoFs, richer feedback combinations, ergonomic miniaturization, and more generalizable psychophysical validation, supporting broader adoption and theoretical advancement in haptics and VR interaction research.